HEROS: Hierarchical Exploration with Online Subregion Updating for 3D Environment Coverage

0

Sign in to get full access
Overview
- This paper introduces HEROS (Hierarchical Exploration with Online Subregion Updating for 3D Environment Coverage), a new approach for efficient exploration and mapping of 3D environments by autonomous agents like search and rescue robots.
- HEROS employs a hierarchical strategy that divides the environment into subregions and dynamically updates the exploration plan based on new information gathered during the mission.
- The system aims to maximize the coverage of the environment while minimizing the time and resources required to complete the task.
Plain English Explanation
HEROS is a new way for robots to explore and map 3D environments, like buildings or forests, more efficiently. It works by dividing the environment into smaller sections and constantly updating the exploration plan as the robot gathers more information.
The key idea is to have the robot focus on exploring one section at a time, rather than trying to cover the entire environment all at once. As the robot learns more about each section, it can adjust its plan to spend more time in the most important or promising areas.
This hierarchical approach, with the environment broken down into manageable subregions, helps the robot explore more thoroughly without wasting time or resources. By continuously updating its understanding of the environment, the robot can make smarter decisions about where to go next and how to best utilize its capabilities.
The goal is to enable robots, such as those used in search and rescue operations, to gather as much useful information about their surroundings as possible in the shortest amount of time. This could help them navigate difficult environments, locate survivors, or map hazardous areas more effectively.
Technical Explanation
HEROS uses a hierarchical exploration strategy to efficiently cover 3D environments. The environment is first divided into coarse subregions, and the robot then focuses on exploring one subregion at a time, dynamically updating its exploration plan based on new information gathered.
The system consists of three key components:
- Hierarchical Representation: The environment is represented as a quadtree, with each node representing a subregion. The robot maintains a belief map of the environment, which is updated as new sensor data is collected.
- Subregion Exploration: The robot selects the most promising subregion to explore next, based on factors like the estimated information gain and the cost of reaching the subregion.
- Online Subregion Update: As the robot explores a subregion, it updates the belief map and adjusts the exploration plan accordingly. This allows the robot to focus on the most valuable areas and avoid wasting time in less promising regions.
The researchers evaluated HEROS using simulated and real-world experiments, comparing its performance to other exploration strategies like HPHS, Hierarchical Large-Scale Multi-Robot Path Replanning, and History-Aware Planning for Risk-Free Autonomous Navigation. The results showed that HEROS was able to achieve higher coverage of the environment while using fewer resources and less time.
Critical Analysis
The paper presents a well-designed and comprehensive approach to 3D environment exploration, with several key strengths:
- The hierarchical representation and dynamic subregion updating allow the robot to focus its efforts on the most promising areas, improving efficiency.
- The online plan adjustment based on new sensor data enables the robot to adapt to changing conditions and unexpected obstacles.
- The evaluation against other state-of-the-art methods demonstrates the benefits of the HEROS approach.
However, the paper also acknowledges some potential limitations and areas for further research:
- The experiments were conducted in simulated or relatively simple real-world environments, and the performance in more complex, dynamic, or unknown environments is not explored.
- The paper does not address how HEROS would handle multiple robots cooperating to explore a shared environment, which could introduce additional challenges and tradeoffs.
- The computational complexity of the algorithm, especially as the environment size or the number of subregions increases, is not thoroughly analyzed.
Researchers interested in improving autonomous exploration and mapping capabilities, especially for applications like Risk-Aware Coverage Path Planning for Lunar Micro or Interactive Human-Oriented Exploration and Supervision, may find the HEROS approach and its core ideas inspiring and worth further investigation.
Conclusion
The HEROS system presents a novel and effective approach for efficient 3D environment exploration by autonomous agents. By leveraging a hierarchical representation of the environment and dynamically updating the exploration plan, HEROS can achieve high coverage while minimizing the time and resources required.
The key strengths of HEROS, such as its ability to focus on the most promising areas and adapt to new information, make it a promising solution for a wide range of applications, from search and rescue missions to autonomous navigation in complex environments. While the paper highlights some potential limitations, the core ideas and techniques introduced in HEROS could inspire further research and development in the field of robotic exploration and mapping.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
HEROS: Hierarchical Exploration with Online Subregion Updating for 3D Environment Coverage
Shijun Long, Ying Li, Chenming Wu, Bin Xu, Wei Fan
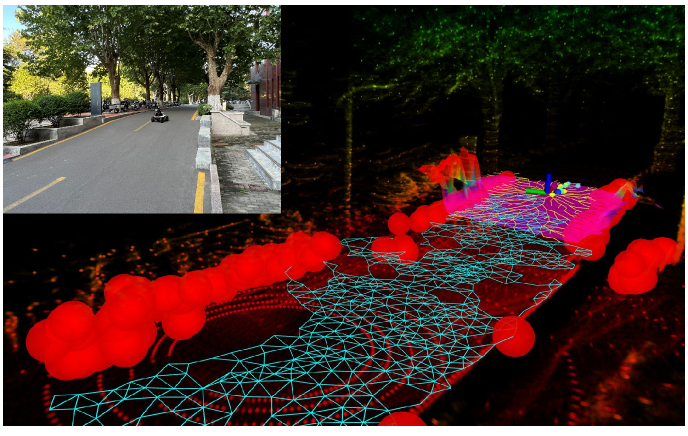
We present an autonomous exploration system for efficient coverage of unknown environments. First, a rapid environment preprocessing method is introduced to provide environmental information for subsequent exploration planning. Then, the whole exploration space is divided into multiple subregion cells, each with varying levels of detail. The subregion cells are capable of decomposition and updating online, effectively characterizing dynamic unknown regions with variable resolution. Finally, the hierarchical planning strategy treats subregions as basic planning units and computes an efficient global coverage path. Guided by the global path, the local path that sequentially visits the viewpoint set is refined to provide an executable path for the robot. This hierarchical planning from coarse to fine steps reduces the complexity of the planning scheme while improving exploration efficiency. The proposed method is compared with state-of-art methods in benchmark environments. Our approach demonstrates superior efficiency in completing exploration while using lower computational resources.
Read more7/22/2024

0
HPHS: Hierarchical Planning based on Hybrid Frontier Sampling for Unknown Environments Exploration
Shijun Long, Ying Li, Chenming Wu, Bin Xu, Wei Fan
Rapid sampling from the environment to acquire available frontier points and timely incorporating them into subsequent planning to reduce fragmented regions are critical to improve the efficiency of autonomous exploration. We propose HPHS, a fast and effective method for the autonomous exploration of unknown environments. In this work, we efficiently sample frontier points directly from the LiDAR data and the local map around the robot, while exploiting a hierarchical planning strategy to provide the robot with a global perspective. The hierarchical planning framework divides the updated environment into multiple subregions and arranges the order of access to them by considering the overall revenue of the global path. The combination of the hybrid frontier sampling method and hierarchical planning strategy reduces the complexity of the planning problem and mitigates the issue of region remnants during the exploration process. Detailed simulation and real-world experiments demonstrate the effectiveness and efficiency of our approach in various aspects. The source code will be released to benefit the further research.
Read more7/22/2024

0
Hierarchical Large Scale Multirobot Path (Re)Planning
Lishuo Pan, Kevin Hsu, Nora Ayanian
We consider a large-scale multi-robot path planning problem in a cluttered environment. Our approach achieves real-time replanning by dividing the workspace into cells and utilizing a hierarchical planner. Specifically, multi-commodity flow-based high-level planners route robots through the cells to reduce congestion, while an anytime low-level planner computes collision-free paths for robots within each cell in parallel. Despite resulting in longer paths compared to the baseline multi-agent pathfinding algorithm, our method produces a solution with significant improvement in computation time. Specifically, we show empirical results of a 500-times speedup in computation time compared to the baseline multi-agent pathfinding approach on the environments we study. We account for the robot's embodiment and support non-stop execution when replanning continuously. We demonstrate the real-time performance of our algorithm with up to 142 robots in simulation, and a representative 32 physical Crazyflie nano-quadrotor experiment.
Read more7/4/2024
0
History-Aware Planning for Risk-free Autonomous Navigation on Unknown Uneven Terrain
Yinchuan Wang, Nianfei Du, Yongsen Qin, Xiang Zhang, Rui Song, Chaoqun Wang
It is challenging for the mobile robot to achieve autonomous and mapless navigation in the unknown environment with uneven terrain. In this study, we present a layered and systematic pipeline. At the local level, we maintain a tree structure that is dynamically extended with the navigation. This structure unifies the planning with the terrain identification. Besides, it contributes to explicitly identifying the hazardous areas on uneven terrain. In particular, certain nodes of the tree are consistently kept to form a sparse graph at the global level, which records the history of the exploration. A series of subgoals that can be obtained in the tree and the graph are utilized for leading the navigation. To determine a subgoal, we develop an evaluation method whose input elements can be efficiently obtained on the layered structure. We conduct both simulation and real-world experiments to evaluate the developed method and its key modules. The experimental results demonstrate the effectiveness and efficiency of our method. The robot can travel through the unknown uneven region safely and reach the target rapidly without a preconstructed map.
Read more6/5/2024