High-quality Surface Reconstruction using Gaussian Surfels

0

Sign in to get full access
Overview
- This paper proposes a novel approach for high-quality 3D surface reconstruction using Gaussian surfels (surface elements).
- The method leverages depth-normal consistency to achieve robust and accurate reconstruction, even in the presence of noise and outliers.
- The authors demonstrate the effectiveness of their technique on various challenging datasets, showing improvements over state-of-the-art methods.
Plain English Explanation
The paper introduces a new way to reconstruct 3D surfaces from visual data, such as depth maps or point clouds. The key idea is to use Gaussian surfels, which are small surface patches that are represented by both position and orientation (normal vector). This Gaussian surfel representation allows the method to better handle noisy or incomplete input data compared to traditional techniques.
The core of the approach is to ensure that the reconstructed surface is consistent with both the depth information and the local surface normals. This "depth-normal consistency" helps the algorithm produce high-quality, detailed 3D models even when the input data is imperfect or incomplete. The authors have demonstrated that their method outperforms existing state-of-the-art surface reconstruction techniques on a variety of challenging datasets.
Technical Explanation
The paper presents a novel 3D surface reconstruction technique that leverages Gaussian surfels. Unlike traditional approaches that represent the surface as a mesh or point cloud, this method uses Gaussian surfels, which capture both the position and orientation (normal vector) of the local surface.
The key innovation is the use of depth-normal consistency to guide the reconstruction process. The algorithm iteratively optimizes the Gaussian surfel parameters to ensure that the reconstructed surface aligns well with both the input depth information and the estimated surface normals. This helps the method produce high-quality, detailed 3D models even in the presence of noise and outliers in the input data.
The authors evaluate their approach on several challenging datasets and show that it outperforms state-of-the-art surface reconstruction and point cloud denoising techniques. The ability to leverage both depth and normal information allows their method to recover fine-grained surface details more effectively.
Critical Analysis
The paper provides a compelling approach for high-quality 3D surface reconstruction, with a strong technical foundation and compelling experimental results. However, the authors acknowledge some limitations:
- The method may struggle with highly complex or detailed surfaces, as the Gaussian surfel representation has a finite spatial extent.
- The optimization process can be computationally expensive, especially for large-scale scenes or high-resolution input data.
- The method requires reliable normal estimation, which can be challenging for some types of input data (e.g., sparse point clouds).
Future research could explore ways to address these limitations, such as using adaptive surfel sizes or developing more efficient optimization strategies. Additionally, the authors could investigate the method's robustness to different types of input data and noise patterns, as well as its applicability to real-world applications like 3D scanning and reconstruction.
Conclusion
This paper presents a novel approach for high-quality 3D surface reconstruction using Gaussian surfels and depth-normal consistency. The method demonstrates state-of-the-art performance on various challenging datasets, highlighting its ability to produce detailed and accurate 3D models even in the presence of noise and outliers.
The Gaussian surfel representation and the depth-normal consistency optimization are key technical innovations that enable this improved surface reconstruction quality. While the approach has some limitations, the authors have made a significant contribution to the field of 3D geometry processing and reconstruction, with potential applications in areas such as virtual reality, autonomous systems, and digital content creation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
High-quality Surface Reconstruction using Gaussian Surfels
Pinxuan Dai, Jiamin Xu, Wenxiang Xie, Xinguo Liu, Huamin Wang, Weiwei Xu
We propose a novel point-based representation, Gaussian surfels, to combine the advantages of the flexible optimization procedure in 3D Gaussian points and the surface alignment property of surfels. This is achieved by directly setting the z-scale of 3D Gaussian points to 0, effectively flattening the original 3D ellipsoid into a 2D ellipse. Such a design provides clear guidance to the optimizer. By treating the local z-axis as the normal direction, it greatly improves optimization stability and surface alignment. While the derivatives to the local z-axis computed from the covariance matrix are zero in this setting, we design a self-supervised normal-depth consistency loss to remedy this issue. Monocular normal priors and foreground masks are incorporated to enhance the quality of the reconstruction, mitigating issues related to highlights and background. We propose a volumetric cutting method to aggregate the information of Gaussian surfels so as to remove erroneous points in depth maps generated by alpha blending. Finally, we apply screened Poisson reconstruction method to the fused depth maps to extract the surface mesh. Experimental results show that our method demonstrates superior performance in surface reconstruction compared to state-of-the-art neural volume rendering and point-based rendering methods.
Read more5/1/2024

0
VCR-GauS: View Consistent Depth-Normal Regularizer for Gaussian Surface Reconstruction
Hanlin Chen, Fangyin Wei, Chen Li, Tianxin Huang, Yunsong Wang, Gim Hee Lee
Although 3D Gaussian Splatting has been widely studied because of its realistic and efficient novel-view synthesis, it is still challenging to extract a high-quality surface from the point-based representation. Previous works improve the surface by incorporating geometric priors from the off-the-shelf normal estimator. However, there are two main limitations: 1) Supervising normal rendered from 3D Gaussians updates only the rotation parameter while neglecting other geometric parameters; 2) The inconsistency of predicted normal maps across multiple views may lead to severe reconstruction artifacts. In this paper, we propose a Depth-Normal regularizer that directly couples normal with other geometric parameters, leading to full updates of the geometric parameters from normal regularization. We further propose a confidence term to mitigate inconsistencies of normal predictions across multiple views. Moreover, we also introduce a densification and splitting strategy to regularize the size and distribution of 3D Gaussians for more accurate surface modeling. Compared with Gaussian-based baselines, experiments show that our approach obtains better reconstruction quality and maintains competitive appearance quality at faster training speed and 100+ FPS rendering. Our code will be made open-source upon paper acceptance.
Read more6/11/2024

0
PGSR: Planar-based Gaussian Splatting for Efficient and High-Fidelity Surface Reconstruction
Danpeng Chen, Hai Li, Weicai Ye, Yifan Wang, Weijian Xie, Shangjin Zhai, Nan Wang, Haomin Liu, Hujun Bao, Guofeng Zhang
Recently, 3D Gaussian Splatting (3DGS) has attracted widespread attention due to its high-quality rendering, and ultra-fast training and rendering speed. However, due to the unstructured and irregular nature of Gaussian point clouds, it is difficult to guarantee geometric reconstruction accuracy and multi-view consistency simply by relying on image reconstruction loss. Although many studies on surface reconstruction based on 3DGS have emerged recently, the quality of their meshes is generally unsatisfactory. To address this problem, we propose a fast planar-based Gaussian splatting reconstruction representation (PGSR) to achieve high-fidelity surface reconstruction while ensuring high-quality rendering. Specifically, we first introduce an unbiased depth rendering method, which directly renders the distance from the camera origin to the Gaussian plane and the corresponding normal map based on the Gaussian distribution of the point cloud, and divides the two to obtain the unbiased depth. We then introduce single-view geometric, multi-view photometric, and geometric regularization to preserve global geometric accuracy. We also propose a camera exposure compensation model to cope with scenes with large illumination variations. Experiments on indoor and outdoor scenes show that our method achieves fast training and rendering while maintaining high-fidelity rendering and geometric reconstruction, outperforming 3DGS-based and NeRF-based methods.
Read more6/11/2024
0
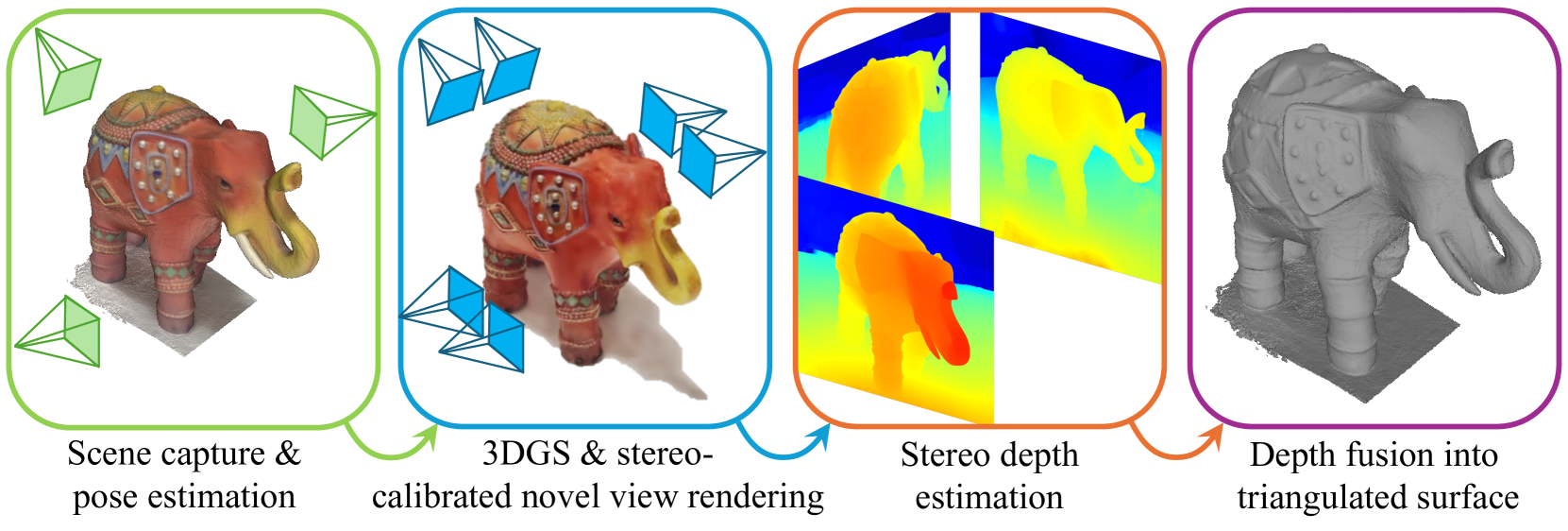
Surface Reconstruction from Gaussian Splatting via Novel Stereo Views
Yaniv Wolf, Amit Bracha, Ron Kimmel
Recently, 3D Gaussian Splatting (3DGS) has emerged as an efficient approach for accurately representing scenes. However, despite its superior novel view synthesis capabilities, extracting the geometry of the scene directly from the Gaussian properties remains a challenge, as those are optimized based on a photometric loss. While some concurrent models have tried adding geometric constraints during the Gaussian optimization process, they still produce noisy, unrealistic surfaces. We propose a novel approach for bridging the gap between the noisy 3DGS representation and the smooth 3D mesh representation, by injecting real-world knowledge into the depth extraction process. Instead of extracting the geometry of the scene directly from the Gaussian properties, we instead extract the geometry through a pre-trained stereo-matching model. We render stereo-aligned pairs of images corresponding to the original training poses, feed the pairs into a stereo model to get a depth profile, and finally fuse all of the profiles together to get a single mesh. The resulting reconstruction is smoother, more accurate and shows more intricate details compared to other methods for surface reconstruction from Gaussian Splatting, while only requiring a small overhead on top of the fairly short 3DGS optimization process. We performed extensive testing of the proposed method on in-the-wild scenes, obtained using a smartphone, showcasing its superior reconstruction abilities. Additionally, we tested the method on the Tanks and Temples and DTU benchmarks, achieving state-of-the-art results.
Read more7/18/2024