Hindsight Preference Learning for Offline Preference-based Reinforcement Learning

0

Sign in to get full access
Overview
- Offline preference-based reinforcement learning is a challenging problem where the agent must learn an optimal policy from historical preferences without interacting with the environment.
- This paper proposes a novel framework called "Hindsight Preference Learning" (HPL) that leverages hindsight information to learn a preference model from offline data.
- The key idea is to learn a preference model that can predict the human's preferences in hindsight, which is shown to be more effective than standard preference learning approaches.
Plain English Explanation
In this paper, the researchers tackle the problem of offline preference-based reinforcement learning. This means that an AI agent needs to learn the optimal way to behave in an environment, but it can only access historical data about what actions a human preferred in the past, rather than being able to directly interact with the environment.
The researchers propose a new approach called Hindsight Preference Learning (HPL). The key insight behind HPL is that instead of just trying to learn which actions the human preferred in the past, the agent should also try to learn why the human had those preferences. By understanding the human's reasoning and the factors that influenced their preferences, the agent can build a more robust and generalizable preference model.
The researchers show that this "hindsight" approach leads to better performance compared to standard preference learning methods, as the agent can better anticipate the human's preferences in novel situations.
Technical Explanation
The paper introduces a framework called Hindsight Preference Learning (HPL) for offline preference-based reinforcement learning. In this setting, the agent must learn an optimal policy from historical preference data without being able to interact with the environment.
The core idea behind HPL is to learn a preference model that can predict the human's preferences in hindsight, i.e., given the full trajectory of states and actions, the model should be able to accurately predict the human's preferences. This is in contrast to standard preference learning approaches, which aim to predict the human's preferences based only on the current state and action.
The authors show that learning a hindsight-based preference model leads to several key benefits:
- Leveraging Contextual Information: By considering the full trajectory, the preference model can take into account contextual information that may have influenced the human's preferences, leading to more accurate predictions.
- Robustness to Distributional Shift: The hindsight-based model is more robust to distributional shift, as it can better generalize to novel situations not seen in the training data.
- Sample Efficiency: The hindsight perspective allows the model to learn from a smaller amount of preference data, as it can extract more information from each observed preference.
The paper presents the technical details of the HPL framework, including the preference model architecture, training objective, and optimization procedure. The authors also conduct extensive experiments on both simulated and real-world environments, demonstrating the superior performance of HPL compared to baseline preference learning methods.
Critical Analysis
The paper presents a well-designed and thorough investigation of the Hindsight Preference Learning (HPL) framework for offline preference-based reinforcement learning. The key strengths of this work include:
- Novelty of the Hindsight Approach: The core idea of learning a preference model that can predict human preferences in hindsight is a novel and insightful contribution to the field of preference-based RL.
- Rigorous Experimental Evaluation: The authors conduct extensive experiments on both simulated and real-world environments, providing a comprehensive assessment of the HPL framework's performance.
- Theoretical Analysis: The paper includes a thoughtful discussion of the theoretical properties of the HPL approach, including its benefits in terms of leveraging contextual information and robustness to distributional shift.
However, the paper also has a few potential limitations:
- Generalization to More Complex Environments: While the authors demonstrate the effectiveness of HPL on a range of environments, it would be valuable to see how the framework scales to more complex, high-dimensional, and/or partially observable settings.
- Interpretability of the Preference Model: The paper does not provide much insight into the inner workings of the learned preference model, which could be an area for further investigation and explanation.
- Potential Biases in the Preference Data: The paper assumes that the historical preference data is representative of the human's true preferences, but in practice, such data may be subject to various biases that could impact the learned model.
Overall, this paper makes a significant contribution to the field of offline preference-based reinforcement learning by introducing the innovative Hindsight Preference Learning framework, which demonstrates promising results and opens up new avenues for further research.
Conclusion
This paper proposes a novel framework called Hindsight Preference Learning (HPL) for addressing the challenge of offline preference-based reinforcement learning. The key idea behind HPL is to learn a preference model that can predict the human's preferences in hindsight, rather than just based on the current state and action.
The authors show that this hindsight-based approach leads to several benefits, including better leveraging of contextual information, increased robustness to distributional shift, and improved sample efficiency. Through extensive experiments, they demonstrate the superior performance of HPL compared to standard preference learning methods.
While the paper presents a well-designed and thorough investigation, there are opportunities for further research, such as evaluating HPL on more complex environments and exploring the interpretability of the learned preference model. Overall, this work makes a significant contribution to the field of offline preference-based reinforcement learning and paves the way for future advancements in this important area of study.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Hindsight Preference Learning for Offline Preference-based Reinforcement Learning
Chen-Xiao Gao, Shengjun Fang, Chenjun Xiao, Yang Yu, Zongzhang Zhang
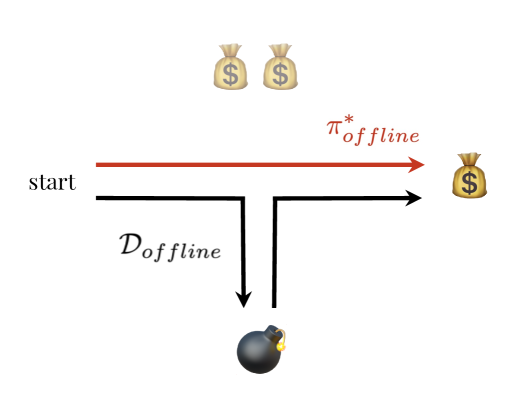
Offline preference-based reinforcement learning (RL), which focuses on optimizing policies using human preferences between pairs of trajectory segments selected from an offline dataset, has emerged as a practical avenue for RL applications. Existing works rely on extracting step-wise reward signals from trajectory-wise preference annotations, assuming that preferences correlate with the cumulative Markovian rewards. However, such methods fail to capture the holistic perspective of data annotation: Humans often assess the desirability of a sequence of actions by considering the overall outcome rather than the immediate rewards. To address this challenge, we propose to model human preferences using rewards conditioned on future outcomes of the trajectory segments, i.e. the hindsight information. For downstream RL optimization, the reward of each step is calculated by marginalizing over possible future outcomes, the distribution of which is approximated by a variational auto-encoder trained using the offline dataset. Our proposed method, Hindsight Preference Learning (HPL), can facilitate credit assignment by taking full advantage of vast trajectory data available in massive unlabeled datasets. Comprehensive empirical studies demonstrate the benefits of HPL in delivering robust and advantageous rewards across various domains. Our code is publicly released at https://github.com/typoverflow/WiseRL.
Read more7/8/2024

0
Hindsight PRIORs for Reward Learning from Human Preferences
Mudit Verma, Katherine Metcalf
Preference based Reinforcement Learning (PbRL) removes the need to hand specify a reward function by learning a reward from preference feedback over policy behaviors. Current approaches to PbRL do not address the credit assignment problem inherent in determining which parts of a behavior most contributed to a preference, which result in data intensive approaches and subpar reward functions. We address such limitations by introducing a credit assignment strategy (Hindsight PRIOR) that uses a world model to approximate state importance within a trajectory and then guides rewards to be proportional to state importance through an auxiliary predicted return redistribution objective. Incorporating state importance into reward learning improves the speed of policy learning, overall policy performance, and reward recovery on both locomotion and manipulation tasks. For example, Hindsight PRIOR recovers on average significantly (p<0.05) more reward on MetaWorld (20%) and DMC (15%). The performance gains and our ablations demonstrate the benefits even a simple credit assignment strategy can have on reward learning and that state importance in forward dynamics prediction is a strong proxy for a state's contribution to a preference decision. Code repository can be found at https://github.com/apple/ml-rlhf-hindsight-prior.
Read more4/16/2024
0
Preference Elicitation for Offline Reinforcement Learning
Aliz'ee Pace, Bernhard Scholkopf, Gunnar Ratsch, Giorgia Ramponi
Applying reinforcement learning (RL) to real-world problems is often made challenging by the inability to interact with the environment and the difficulty of designing reward functions. Offline RL addresses the first challenge by considering access to an offline dataset of environment interactions labeled by the reward function. In contrast, Preference-based RL does not assume access to the reward function and learns it from preferences, but typically requires an online interaction with the environment. We bridge the gap between these frameworks by exploring efficient methods for acquiring preference feedback in a fully offline setup. We propose Sim-OPRL, an offline preference-based reinforcement learning algorithm, which leverages a learned environment model to elicit preference feedback on simulated rollouts. Drawing on insights from both the offline RL and the preference-based RL literature, our algorithm employs a pessimistic approach for out-of-distribution data, and an optimistic approach for acquiring informative preferences about the optimal policy. We provide theoretical guarantees regarding the sample complexity of our approach, dependent on how well the offline data covers the optimal policy. Finally, we demonstrate the empirical performance of Sim-OPRL in different environments.
Read more6/27/2024

0
Online Bandit Learning with Offline Preference Data
Akhil Agnihotri, Rahul Jain, Deepak Ramachandran, Zheng Wen
Reinforcement Learning with Human Feedback (RLHF) is at the core of fine-tuning methods for generative AI models for language and images. Such feedback is often sought as rank or preference feedback from human raters, as opposed to eliciting scores since the latter tends to be very noisy. On the other hand, RL theory and algorithms predominantly assume that a reward feedback is available. In particular, approaches for online learning that can be helpful in adaptive data collection via active learning cannot incorporate offline preference data. In this paper, we adopt a finite-armed linear bandit model as a prototypical model of online learning. We consider an offline preference dataset to be available generated by an expert of unknown 'competence'. We propose $texttt{warmPref-PS}$, a posterior sampling algorithm for online learning that can be warm-started with an offline dataset with noisy preference feedback. We show that by modeling the competence of the expert that generated it, we are able to use such a dataset most effectively. We support our claims with novel theoretical analysis of its Bayesian regret, as well as extensive empirical evaluation of an approximate algorithm which performs substantially better (almost 25 to 50% regret reduction in our studies) as compared to baselines.
Read more6/17/2024