Learning-based Traversability Costmap for Autonomous Off-road Navigation
2406.08187
0
0

Abstract
Traversability estimation in off-road terrains is an essential procedure for autonomous navigation. However, creating reliable labels for complex interactions between the robot and the surface is still a challenging problem in learning-based costmap generation. To address this, we propose a method that predicts traversability costmaps by leveraging both visual and geometric information of the environment. To quantify the surface properties like roughness and bumpiness, we introduce a novel way of risk-aware labelling with proprioceptive information for network training. We validate our method in costmap prediction and navigation tasks for complex off-road scenarios. Our results demonstrate that our costmap prediction method excels in terms of average accuracy and MSE. The navigation results indicate that using our learned costmaps leads to safer and smoother driving, outperforming previous methods in terms of the highest success rate, lowest normalized trajectory length, lowest time cost, and highest mean stability across two scenarios.
Create account to get full access
Overview
- This paper presents a learning-based approach for generating traversability costmaps for autonomous off-road navigation.
- The method uses an Inertial Measurement Unit (IMU) and other sensors to detect and classify terrain features, which are then used to create a costmap that guides the robot's navigation.
- The authors evaluate their approach on both simulated and real-world off-road environments, demonstrating its effectiveness and efficiency.
Plain English Explanation
Navigating through rough, uneven terrain can be a significant challenge for autonomous robots and vehicles. This paper proposes a new way to help these systems better understand and navigate off-road environments.
The key idea is to use sensors, like an Inertial Measurement Unit (IMU), to detect and classify different types of terrain features, such as rocks, hills, or soft ground. This information is then used to create a "costmap" - a map that assigns a "cost" or difficulty level to different parts of the environment. The robot can then use this costmap to plan the best path through the area, avoiding obstacles and difficult terrain.
The researchers tested their approach in both simulated and real-world off-road environments, and found that it was able to accurately identify traversable and non-traversable areas. This allows the robot to navigate more safely and efficiently through challenging outdoor settings, like forests or fields.
Technical Explanation
The paper presents a learning-based approach for generating traversability costmaps for autonomous off-road navigation. The key components of the system are:
-
Sensor Suite: The robot is equipped with an Inertial Measurement Unit (IMU) and other sensors to detect and classify terrain features.
-
Terrain Classifier: A machine learning model is trained to identify different types of terrain, such as rocks, hills, or soft ground, based on the sensor data.
-
Costmap Generation: The classified terrain information is used to create a traversability costmap, which assigns a "cost" or difficulty level to different regions of the environment.
-
Navigation Planning: The robot can then use the traversability costmap to plan the optimal path through the off-road environment, avoiding obstacles and difficult terrain.
The authors evaluate their approach through both simulated and real-world experiments in various off-road settings. The results demonstrate the effectiveness and efficiency of the learning-based traversability costmap approach, enabling more robust and reliable autonomous navigation in challenging outdoor environments.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed learning-based traversability costmap approach. The authors have addressed several key challenges in off-road navigation, such as accurately classifying terrain features and generating useful costmaps to guide the robot's path planning.
One potential limitation of the approach is that it relies heavily on the quality and reliability of the sensor data, particularly the IMU. In complex, dynamic environments, sensor noise or interference could affect the terrain classification and, consequently, the generated costmap. The authors acknowledge this issue and suggest exploring sensor fusion techniques to improve robustness.
Additionally, the paper does not provide a detailed analysis of the computational complexity and real-time performance of the system. This information would be valuable for assessing the practicality of deploying the approach on resource-constrained robotic platforms.
Overall, the research presents a promising direction for enhancing the traversability-aware path planning and control capabilities of autonomous off-road vehicles. Further research could explore how this approach might be integrated with history-aware planning or weakly supervised traversability estimation techniques to provide a more comprehensive solution for off-road autonomous driving.
Conclusion
This paper introduces a learning-based approach for generating traversability costmaps to guide autonomous off-road navigation. By using an IMU and other sensors to detect and classify terrain features, the system can create a detailed map of the environment's traversability, allowing the robot to plan safer and more efficient paths.
The researchers have demonstrated the effectiveness of their approach through both simulated and real-world experiments, showcasing its potential to enhance the robustness and reliability of autonomous navigation in challenging outdoor settings. While the system has some limitations, such as reliance on sensor quality, the work represents an important step forward in the field of off-road autonomous navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🎯
ForestTrav: Accurate, Efficient and Deployable Forest Traversability Estimation for Autonomous Ground Vehicles
Fabio Ruetz, Nicholas Lawrance, Emili Hern'andez, Paulo Borges, Thierry Peynot
0
0
Autonomous navigation in unstructured vegetated environments remains an open challenge. To successfully operate in these settings, ground vehicles must assess the traversability of the environment and determine which vegetation is pliable enough to push through. In this work, we propose a novel method that combines a high-fidelity and feature-rich 3D voxel representation while leveraging the structural context and sparseness of SCNN's to assess Traversability Estimation (TE) in densely vegetated environments. The proposed method is thoroughly evaluated on an accurately-labeled real-world data set that we provide to the community. It is shown to outperform state-of-the-art methods by a significant margin (0.59 vs. 0.39 MCC score at 0.1m voxel resolution) in challenging scenes and to generalize to unseen environments. In addition, the method is economical in the amount of training data and training time required: a model is trained in minutes on a desktop computer. We show that by exploiting the context of the environment, our method can use different feature combinations with only limited performance variations. For example, our approach can be used with lidar-only features, whilst still assessing complex vegetated environments accurately, which was not demonstrated previously in the literature in such environments. In addition, we propose an approach to assess a traversability estimator's sensitivity to information quality and show our method's sensitivity is low.
5/16/2024
History-Aware Planning for Risk-free Autonomous Navigation on Unknown Uneven Terrain
Yinchuan Wang, Nianfei Du, Yongsen Qin, Xiang Zhang, Rui Song, Chaoqun Wang
0
0
It is challenging for the mobile robot to achieve autonomous and mapless navigation in the unknown environment with uneven terrain. In this study, we present a layered and systematic pipeline. At the local level, we maintain a tree structure that is dynamically extended with the navigation. This structure unifies the planning with the terrain identification. Besides, it contributes to explicitly identifying the hazardous areas on uneven terrain. In particular, certain nodes of the tree are consistently kept to form a sparse graph at the global level, which records the history of the exploration. A series of subgoals that can be obtained in the tree and the graph are utilized for leading the navigation. To determine a subgoal, we develop an evaluation method whose input elements can be efficiently obtained on the layered structure. We conduct both simulation and real-world experiments to evaluate the developed method and its key modules. The experimental results demonstrate the effectiveness and efficiency of our method. The robot can travel through the unknown uneven region safely and reach the target rapidly without a preconstructed map.
6/5/2024

Traversability-aware Adaptive Optimization for Path Planning and Control in Mountainous Terrain
Se-Wook Yoo, E In Son, Seung-Woo Seo
0
0
Autonomous navigation in extreme mountainous terrains poses challenges due to the presence of mobility-stressing elements and undulating surfaces, making it particularly difficult compared to conventional off-road driving scenarios. In such environments, estimating traversability solely based on exteroceptive sensors often leads to the inability to reach the goal due to a high prevalence of non-traversable areas. In this paper, we consider traversability as a relative value that integrates the robot's internal state, such as speed and torque to exhibit resilient behavior to reach its goal successfully. We separate traversability into apparent traversability and relative traversability, then incorporate these distinctions in the optimization process of sampling-based planning and motion predictive control. Our method enables the robots to execute the desired behaviors more accurately while avoiding hazardous regions and getting stuck. Experiments conducted on simulation with 27 diverse types of mountainous terrain and real-world demonstrate the robustness of the proposed framework, with increasingly better performance observed in more complex environments.
4/5/2024
Motion planning for off-road autonomous driving based on human-like cognition and weight adaptation
Yuchun Wang, Cheng Gong, Jianwei Gong, Peng Jia
0
0
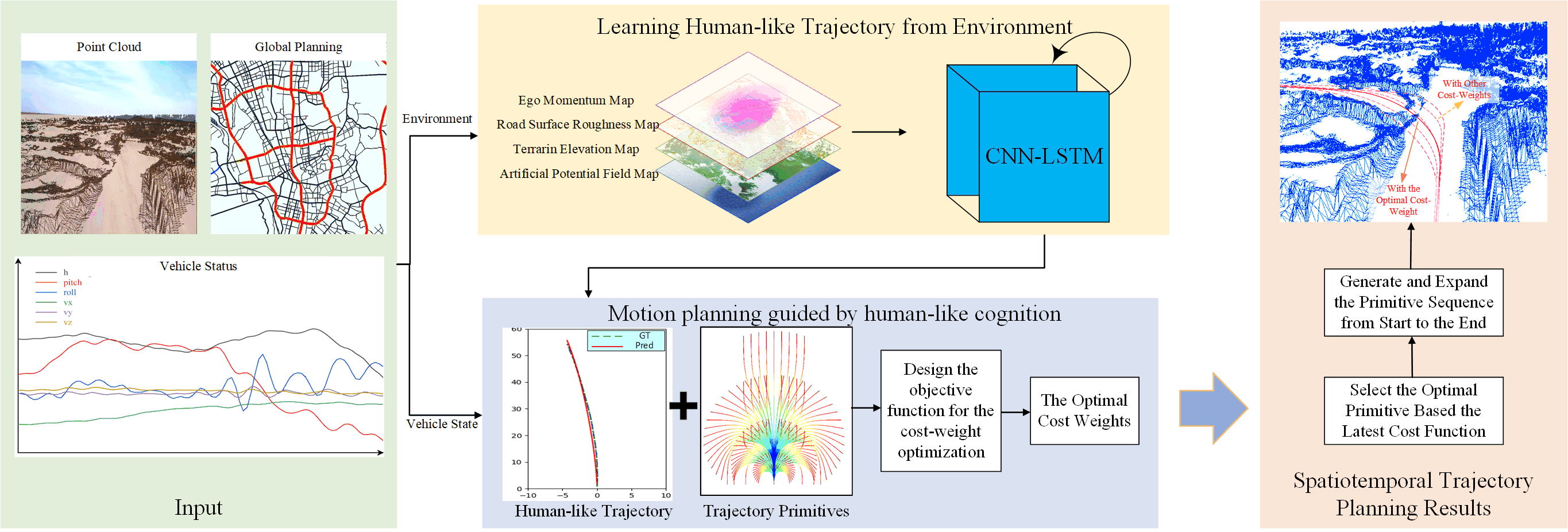
Driving in an off-road environment is challenging for autonomous vehicles due to the complex and varied terrain. To ensure stable and efficient travel, the vehicle requires consideration and balancing of environmental factors, such as undulations, roughness, and obstacles, to generate optimal trajectories that can adapt to changing scenarios. However, traditional motion planners often utilize a fixed cost function for trajectory optimization, making it difficult to adapt to different driving strategies in challenging irregular terrains and uncommon scenarios. To address these issues, we propose an adaptive motion planner based on human-like cognition and cost evaluation for off-road driving. First, we construct a multi-layer map describing different features of off-road terrains, including terrain elevation, roughness, obstacle, and artificial potential field map. Subsequently, we employ a CNN-LSTM network to learn the trajectories planned by human drivers in various off-road scenarios. Then, based on human-like generated trajectories in different environments, we design a primitive-based trajectory planner that aims to mimic human trajectories and cost weight selection, generating trajectories that are consistent with the dynamics of off-road vehicles. Finally, we compute optimal cost weights and select and extend behavioral primitives to generate highly adaptive, stable, and efficient trajectories. We validate the effectiveness of the proposed method through experiments in a desert off-road environment with complex terrain and varying road conditions. The experimental results show that the proposed human-like motion planner has excellent adaptability to different off-road conditions. It shows real-time operation, greater stability, and more human-like planning ability in diverse and challenging scenarios.
4/30/2024