HoloGS: Instant Depth-based 3D Gaussian Splatting with Microsoft HoloLens 2

0

Sign in to get full access
Overview
- Introduces a new depth-based 3D Gaussian splatting technique called HoloGS, designed for real-time performance on the Microsoft HoloLens 2 augmented reality (AR) headset.
- Leverages the depth sensor of the HoloLens 2 to efficiently reconstruct 3D scenes and enable interactive AR experiences.
- Demonstrates how HoloGS can be used for various applications, such as 3D Gaussian splatting, SLAM, and surface reconstruction.
Plain English Explanation
The research paper presents a new technique called HoloGS, which is designed to quickly and efficiently create 3D models of real-world environments using the depth sensor in the Microsoft HoloLens 2 augmented reality (AR) headset.
The key idea behind HoloGS is to use a technique called "3D Gaussian splatting" to reconstruct 3D scenes. This involves representing each point in the 3D space as a small, round "splat" that has a Gaussian (bell-shaped) distribution of density. By combining all these splats, the technique can build up a realistic 3D model of the environment.
The researchers show that HoloGS can run in real-time on the HoloLens 2 hardware, allowing for interactive AR experiences where digital objects can be seamlessly overlaid and integrated with the physical world. This could enable a wide range of applications, such as virtual interior design, 3D gaming, and even SLAM (Simultaneous Localization and Mapping) for robotics.
Overall, the HoloGS technique represents an important advancement in 3D Gaussian splatting and surface reconstruction technologies, and could pave the way for more realistic and immersive AR experiences on devices like the HoloLens 2.
Technical Explanation
The paper introduces a new depth-based 3D Gaussian splatting technique called HoloGS that is designed for real-time performance on the Microsoft HoloLens 2 AR headset. The key innovations of HoloGS include:
-
Depth-based Splatting: HoloGS leverages the depth sensor of the HoloLens 2 to efficiently reconstruct 3D scenes. It uses the depth information to directly splat 3D Gaussian kernels onto the scene, without the need for an intermediate depth map or mesh representation.
-
Optimized for HoloLens 2: The HoloGS pipeline is carefully optimized to take advantage of the hardware capabilities of the HoloLens 2, including its GPU and depth sensor. This allows HoloGS to achieve real-time performance (30+ FPS) on the device.
-
Flexible Applications: The authors demonstrate how HoloGS can be used for a variety of applications, such as 3D Gaussian splatting, SLAM, and surface reconstruction. This highlights the versatility of the technique.
The paper includes detailed experiments that validate the performance and accuracy of HoloGS on various benchmarks, as well as qualitative results showcasing its use in interactive AR scenarios.
Critical Analysis
The research presented in this paper represents an exciting advancement in the field of 3D reconstruction and Gaussian splatting, particularly for augmented reality applications on resource-constrained devices like the HoloLens 2.
One potential limitation of the HoloGS approach is that it relies solely on depth information from the HoloLens 2 sensor, without incorporating any color or texture data. This could limit the fidelity of the reconstructed 3D models, especially for scenes with complex materials or lighting. It would be interesting to see how HoloGS could be extended to leverage additional sensor modalities, such as the RGB camera, to further improve the realism and accuracy of the 3D reconstructions.
Additionally, the paper does not provide a thorough analysis of the limitations or failure cases of the HoloGS technique. It would be valuable to understand the types of environments or scenarios where HoloGS may struggle, and how future work could address these challenges.
Overall, the HoloGS technique represents an important step forward in enabling real-time 3D Gaussian splatting and surface reconstruction on mobile AR devices. As the field of augmented reality continues to evolve, techniques like HoloGS will play a crucial role in creating more immersive and seamless experiences for users.
Conclusion
The HoloGS technique presented in this paper represents a significant advancement in the field of 3D reconstruction and Gaussian splatting for augmented reality applications. By leveraging the depth sensor of the Microsoft HoloLens 2, HoloGS is able to efficiently reconstruct 3D scenes in real-time, enabling interactive and seamless AR experiences.
The key innovations of HoloGS, including its depth-based splatting approach and optimizations for the HoloLens 2 hardware, demonstrate the potential of this technique to be applied in a wide range of AR applications, such as virtual interior design, 3D gaming, and even SLAM for robotics.
As the field of augmented reality continues to evolve, techniques like HoloGS will play a crucial role in creating more immersive and realistic digital experiences that seamlessly integrate with the physical world. While the current version of HoloGS has some limitations, the research presented in this paper represents an important step forward in the 3D Gaussian splatting and surface reconstruction fields, paving the way for future advancements and innovations in this space.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
HoloGS: Instant Depth-based 3D Gaussian Splatting with Microsoft HoloLens 2
Miriam Jager, Theodor Kapler, Michael Fe{ss}enbecker, Felix Birkelbach, Markus Hillemann, Boris Jutzi
In the fields of photogrammetry, computer vision and computer graphics, the task of neural 3D scene reconstruction has led to the exploration of various techniques. Among these, 3D Gaussian Splatting stands out for its explicit representation of scenes using 3D Gaussians, making it appealing for tasks like 3D point cloud extraction and surface reconstruction. Motivated by its potential, we address the domain of 3D scene reconstruction, aiming to leverage the capabilities of the Microsoft HoloLens 2 for instant 3D Gaussian Splatting. We present HoloGS, a novel workflow utilizing HoloLens sensor data, which bypasses the need for pre-processing steps like Structure from Motion by instantly accessing the required input data i.e. the images, camera poses and the point cloud from depth sensing. We provide comprehensive investigations, including the training process and the rendering quality, assessed through the Peak Signal-to-Noise Ratio, and the geometric 3D accuracy of the densified point cloud from Gaussian centers, measured by Chamfer Distance. We evaluate our approach on two self-captured scenes: An outdoor scene of a cultural heritage statue and an indoor scene of a fine-structured plant. Our results show that the HoloLens data, including RGB images, corresponding camera poses, and depth sensing based point clouds to initialize the Gaussians, are suitable as input for 3D Gaussian Splatting.
Read more5/6/2024

0
DN-Splatter: Depth and Normal Priors for Gaussian Splatting and Meshing
Matias Turkulainen, Xuqian Ren, Iaroslav Melekhov, Otto Seiskari, Esa Rahtu, Juho Kannala
High-fidelity 3D reconstruction of common indoor scenes is crucial for VR and AR applications. 3D Gaussian splatting, a novel differentiable rendering technique, has achieved state-of-the-art novel view synthesis results with high rendering speeds and relatively low training times. However, its performance on scenes commonly seen in indoor datasets is poor due to the lack of geometric constraints during optimization. We extend 3D Gaussian splatting with depth and normal cues to tackle challenging indoor datasets and showcase techniques for efficient mesh extraction. Specifically, we regularize the optimization procedure with depth information, enforce local smoothness of nearby Gaussians, and use off-the-shelf monocular networks to achieve better alignment with the true scene geometry. We propose an adaptive depth loss based on the gradient of color images, improving depth estimation and novel view synthesis results over various baselines. Our simple yet effective regularization technique enables direct mesh extraction from the Gaussian representation, yielding more physically accurate reconstructions of indoor scenes. Our code will be released in https://github.com/maturk/dn-splatter.
Read more7/19/2024
0
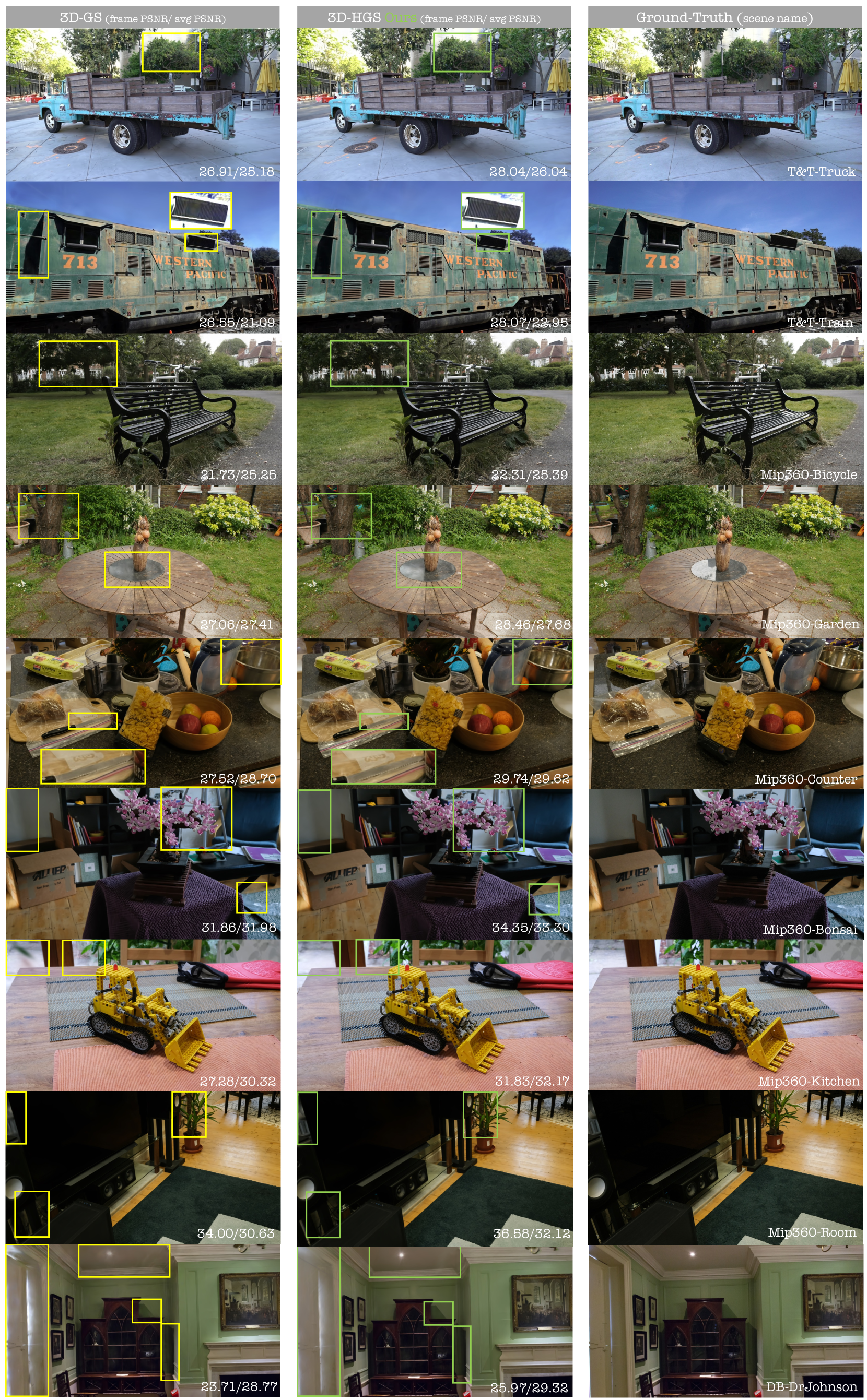
3D-HGS: 3D Half-Gaussian Splatting
Haolin Li, Jinyang Liu, Mario Sznaier, Octavia Camps
Photo-realistic 3D Reconstruction is a fundamental problem in 3D computer vision. This domain has seen considerable advancements owing to the advent of recent neural rendering techniques. These techniques predominantly aim to focus on learning volumetric representations of 3D scenes and refining these representations via loss functions derived from rendering. Among these, 3D Gaussian Splatting (3D-GS) has emerged as a significant method, surpassing Neural Radiance Fields (NeRFs). 3D-GS uses parameterized 3D Gaussians for modeling both spatial locations and color information, combined with a tile-based fast rendering technique. Despite its superior rendering performance and speed, the use of 3D Gaussian kernels has inherent limitations in accurately representing discontinuous functions, notably at edges and corners for shape discontinuities, and across varying textures for color discontinuities. To address this problem, we propose to employ 3D Half-Gaussian (3D-HGS) kernels, which can be used as a plug-and-play kernel. Our experiments demonstrate their capability to improve the performance of current 3D-GS related methods and achieve state-of-the-art rendering performance on various datasets without compromising rendering speed.
Read more6/17/2024
0
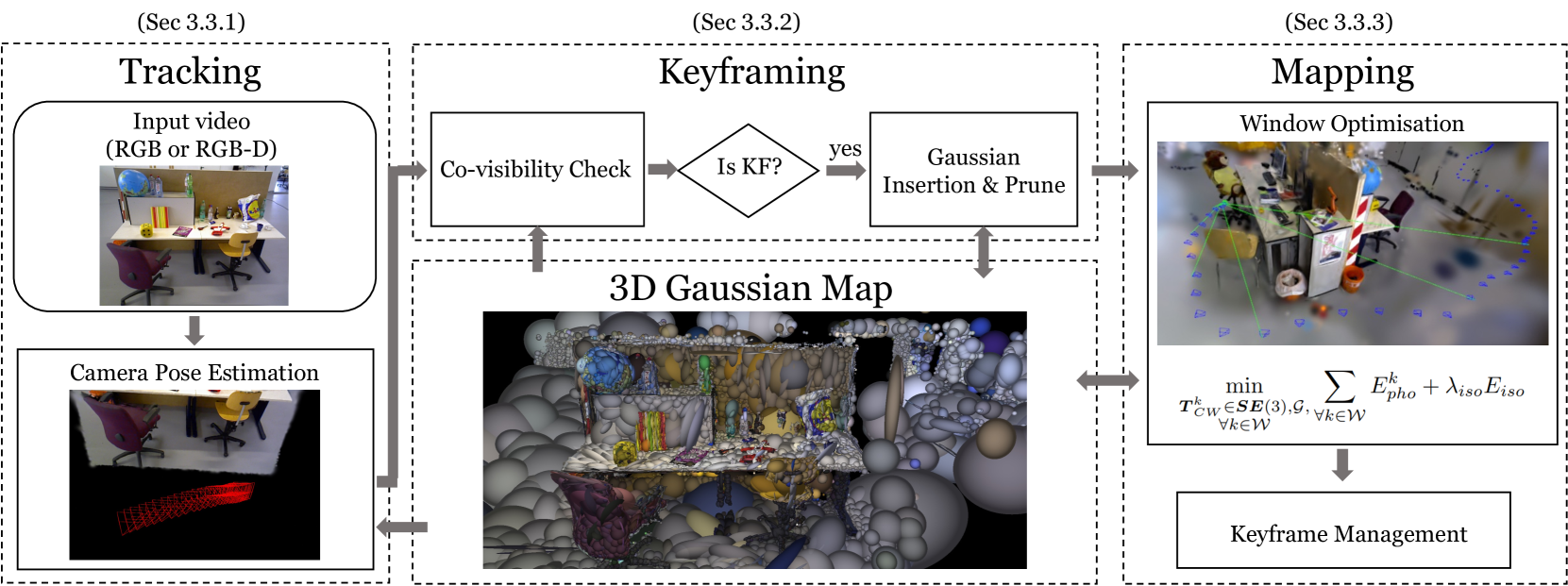
Gaussian Splatting SLAM
Hidenobu Matsuki, Riku Murai, Paul H. J. Kelly, Andrew J. Davison
We present the first application of 3D Gaussian Splatting in monocular SLAM, the most fundamental but the hardest setup for Visual SLAM. Our method, which runs live at 3fps, utilises Gaussians as the only 3D representation, unifying the required representation for accurate, efficient tracking, mapping, and high-quality rendering. Designed for challenging monocular settings, our approach is seamlessly extendable to RGB-D SLAM when an external depth sensor is available. Several innovations are required to continuously reconstruct 3D scenes with high fidelity from a live camera. First, to move beyond the original 3DGS algorithm, which requires accurate poses from an offline Structure from Motion (SfM) system, we formulate camera tracking for 3DGS using direct optimisation against the 3D Gaussians, and show that this enables fast and robust tracking with a wide basin of convergence. Second, by utilising the explicit nature of the Gaussians, we introduce geometric verification and regularisation to handle the ambiguities occurring in incremental 3D dense reconstruction. Finally, we introduce a full SLAM system which not only achieves state-of-the-art results in novel view synthesis and trajectory estimation but also reconstruction of tiny and even transparent objects.
Read more4/16/2024