Towards Consistent and Explainable Motion Prediction using Heterogeneous Graph Attention

0
Sign in to get full access
Overview
- This paper proposes a new approach for consistent and explainable motion prediction using a Heterogeneous Graph Attention (HGA) network.
- The model aims to capture the complex interactions between different types of entities (e.g., pedestrians, vehicles, obstacles) in a scene to improve the accuracy and interpretability of motion forecasting.
- The authors introduce several key innovations, including a heterogeneous graph structure, a novel attention mechanism, and methods for generating consistent and interpretable predictions.
Plain English Explanation
The paper describes a new way to predict how things will move in a scene, like people walking or cars driving. Current methods for this task often struggle to capture the complex interactions between different types of objects, like pedestrians, vehicles, and obstacles. This can lead to inaccurate or hard-to-understand predictions.
The researchers' approach uses a Heterogeneous Graph Attention (HGA) network to better model these interactions. A heterogeneous graph is a way of representing different types of objects and the relationships between them. The attention mechanism helps the model focus on the most relevant information when making predictions.
The key innovations in this work are:
- Using a heterogeneous graph structure to capture the diverse entities and their connections in a scene.
- Developing a novel attention mechanism that can handle this heterogeneous information.
- Generating predictions that are both accurate and easy to understand for humans.
By taking this approach, the researchers were able to improve the consistency and explainability of motion forecasting, which could have important applications in areas like self-driving cars, surveillance, and robotics.
Technical Explanation
The paper proposes a Heterogeneous Graph Attention (HGA) network for motion prediction. The model takes as input the current state of a scene, including the positions and attributes of various entities (e.g., pedestrians, vehicles, obstacles), and predicts their future trajectories.
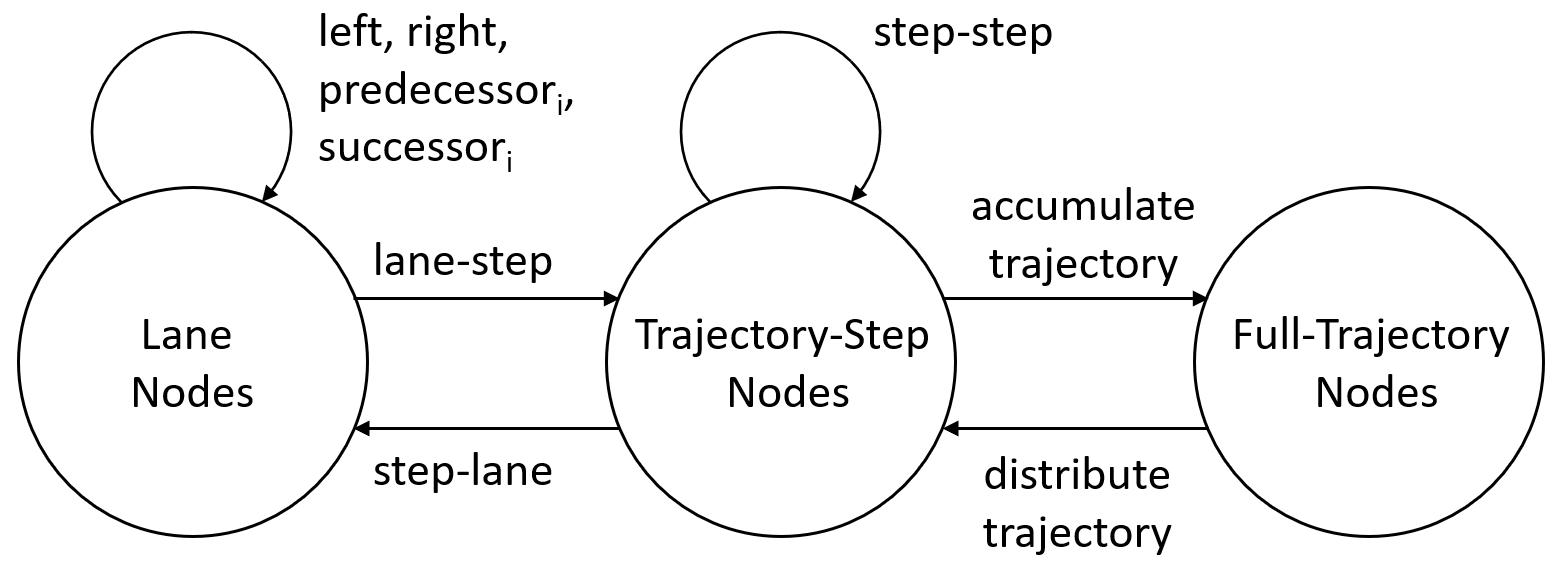
The key novelty of the approach is the use of a heterogeneous graph representation to capture the complex interactions between different types of entities. This graph consists of nodes representing the entities and edges representing their relationships. The graph is "heterogeneous" because the nodes and edges can have different types, reflecting the diversity of the objects and interactions in the scene.
To process this heterogeneous graph, the authors introduce a novel attention mechanism that can effectively aggregate information from the different node and edge types. This attention module learns to focus on the most relevant parts of the graph when making predictions for a particular entity.
Another important contribution is the method for generating consistent and interpretable predictions. The model produces not just a single trajectory prediction, but a set of diverse and plausible trajectories. These trajectories are also annotated with explanations, such as the key factors influencing the predicted motion.
The authors evaluate their approach on several benchmark datasets for motion prediction, demonstrating improvements in both accuracy and interpretability compared to state-of-the-art methods. For example, the model achieves higher scores on standard metrics like Average Displacement Error, while also providing richer explanations for its predictions.
Critical Analysis
The paper presents a compelling approach for improving the consistency and explainability of motion prediction using a Heterogeneous Graph Attention network. The heterogeneous graph representation and attention mechanism are well-motivated and seem to offer significant advantages over previous methods.
One potential limitation is the complexity of the model, which may make it more computationally expensive or difficult to train than simpler alternatives. The authors acknowledge this and discuss strategies for mitigating the complexity, such as efficient graph neural network architectures and targeted training approaches.
Another area for further research is the evaluation of the model's explanations. While the paper demonstrates that the model can produce interpretable predictions, it would be valuable to conduct user studies or other forms of human evaluation to better understand the effectiveness and usefulness of these explanations in real-world applications.
Additionally, the paper focuses primarily on motion prediction in static scenes. Extending the approach to handle dynamic environments with moving obstacles or other entities could be an interesting direction for future work, as it would further test the model's ability to capture and reason about complex interactions.
Overall, this paper represents an important step forward in the field of motion prediction, offering a novel and promising solution for improving the consistency and explainability of these models. The technical innovations and the potential applications in areas like self-driving cars, robotics, and surveillance make this a valuable contribution to the literature.
Conclusion
This paper presents a new Heterogeneous Graph Attention (HGA) network for consistent and explainable motion prediction. The key innovations include the use of a heterogeneous graph representation to capture diverse entities and their interactions, a novel attention mechanism to effectively process this graph, and methods for generating consistent and interpretable predictions.
The authors demonstrate that their approach outperforms state-of-the-art methods on benchmark datasets, while also providing richer explanations for the model's predictions. This work has important implications for a variety of applications, such as self-driving cars, surveillance, and robotics, where accurate and interpretable motion forecasting is crucial.
The technical complexity and potential limitations of the model suggest interesting avenues for future research, such as improving computational efficiency, evaluating the effectiveness of the explanations, and extending the approach to handle dynamic environments. Overall, this paper represents a significant contribution to the field of motion prediction and highlights the value of combining advanced graph-based modeling with interpretable and consistent output.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Towards Consistent and Explainable Motion Prediction using Heterogeneous Graph Attention
Tobias Demmler, Andreas Tamke, Thao Dang, Karsten Haug, Lars Mikelsons
In autonomous driving, accurately interpreting the movements of other road users and leveraging this knowledge to forecast future trajectories is crucial. This is typically achieved through the integration of map data and tracked trajectories of various agents. Numerous methodologies combine this information into a singular embedding for each agent, which is then utilized to predict future behavior. However, these approaches have a notable drawback in that they may lose exact location information during the encoding process. The encoding still includes general map information. However, the generation of valid and consistent trajectories is not guaranteed. This can cause the predicted trajectories to stray from the actual lanes. This paper introduces a new refinement module designed to project the predicted trajectories back onto the actual map, rectifying these discrepancies and leading towards more consistent predictions. This versatile module can be readily incorporated into a wide range of architectures. Additionally, we propose a novel scene encoder that handles all relations between agents and their environment in a single unified heterogeneous graph attention network. By analyzing the attention values on the different edges in this graph, we can gain unique insights into the neural network's inner workings leading towards a more explainable prediction.
Read more5/17/2024
0
Attention-aware Social Graph Transformer Networks for Stochastic Trajectory Prediction
Yao Liu, Binghao Li, Xianzhi Wang, Claude Sammut, Lina Yao
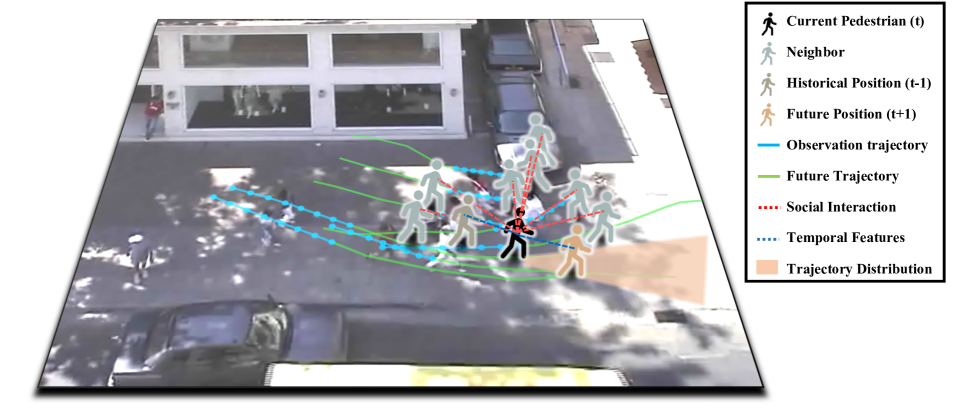
Trajectory prediction is fundamental to various intelligent technologies, such as autonomous driving and robotics. The motion prediction of pedestrians and vehicles helps emergency braking, reduces collisions, and improves traffic safety. Current trajectory prediction research faces problems of complex social interactions, high dynamics and multi-modality. Especially, it still has limitations in long-time prediction. We propose Attention-aware Social Graph Transformer Networks for multi-modal trajectory prediction. We combine Graph Convolutional Networks and Transformer Networks by generating stable resolution pseudo-images from Spatio-temporal graphs through a designed stacking and interception method. Furthermore, we design the attention-aware module to handle social interaction information in scenarios involving mixed pedestrian-vehicle traffic. Thus, we maintain the advantages of the Graph and Transformer, i.e., the ability to aggregate information over an arbitrary number of neighbors and the ability to perform complex time-dependent data processing. We conduct experiments on datasets involving pedestrian, vehicle, and mixed trajectories, respectively. Our results demonstrate that our model minimizes displacement errors across various metrics and significantly reduces the likelihood of collisions. It is worth noting that our model effectively reduces the final displacement error, illustrating the ability of our model to predict for a long time.
Read more5/14/2024
🔮
0
SemanticFormer: Holistic and Semantic Traffic Scene Representation for Trajectory Prediction using Knowledge Graphs
Zhigang Sun, Zixu Wang, Lavdim Halilaj, Juergen Luettin
Trajectory prediction in autonomous driving relies on accurate representation of all relevant contexts of the driving scene, including traffic participants, road topology, traffic signs, as well as their semantic relations to each other. Despite increased attention to this issue, most approaches in trajectory prediction do not consider all of these factors sufficiently. We present SemanticFormer, an approach for predicting multimodal trajectories by reasoning over a semantic traffic scene graph using a hybrid approach. It utilizes high-level information in the form of meta-paths, i.e. trajectories on which an agent is allowed to drive from a knowledge graph which is then processed by a novel pipeline based on multiple attention mechanisms to predict accurate trajectories. SemanticFormer comprises a hierarchical heterogeneous graph encoder to capture spatio-temporal and relational information across agents as well as between agents and road elements. Further, it includes a predictor to fuse different encodings and decode trajectories with probabilities. Finally, a refinement module assesses permitted meta-paths of trajectories and speed profiles to obtain final predicted trajectories. Evaluation of the nuScenes benchmark demonstrates improved performance compared to several SOTA methods. In addition, we demonstrate that our knowledge graph can be easily added to two graph-based existing SOTA methods, namely VectorNet and Laformer, replacing their original homogeneous graphs. The evaluation results suggest that by adding our knowledge graph the performance of the original methods is enhanced by 5% and 4%, respectively.
Read more7/2/2024

0
HPNet: Dynamic Trajectory Forecasting with Historical Prediction Attention
Xiaolong Tang, Meina Kan, Shiguang Shan, Zhilong Ji, Jinfeng Bai, Xilin Chen
Predicting the trajectories of road agents is essential for autonomous driving systems. The recent mainstream methods follow a static paradigm, which predicts the future trajectory by using a fixed duration of historical frames. These methods make the predictions independently even at adjacent time steps, which leads to potential instability and temporal inconsistency. As successive time steps have largely overlapping historical frames, their forecasting should have intrinsic correlation, such as overlapping predicted trajectories should be consistent, or be different but share the same motion goal depending on the road situation. Motivated by this, in this work, we introduce HPNet, a novel dynamic trajectory forecasting method. Aiming for stable and accurate trajectory forecasting, our method leverages not only historical frames including maps and agent states, but also historical predictions. Specifically, we newly design a Historical Prediction Attention module to automatically encode the dynamic relationship between successive predictions. Besides, it also extends the attention range beyond the currently visible window benefitting from the use of historical predictions. The proposed Historical Prediction Attention together with the Agent Attention and Mode Attention is further formulated as the Triple Factorized Attention module, serving as the core design of HPNet.Experiments on the Argoverse and INTERACTION datasets show that HPNet achieves state-of-the-art performance, and generates accurate and stable future trajectories. Our code are available at https://github.com/XiaolongTang23/HPNet.
Read more4/12/2024