Human Mimetic Forearm Design with Radioulnar Joint using Miniature Bone-Muscle Modules and Its Applications

0

Sign in to get full access
Overview
- The paper presents a design for a human-mimetic forearm with a radioulnar joint using miniature bone-muscle modules.
- The forearm design aims to replicate the anatomy and function of the human forearm, including the ability to rotate the hand.
- The researchers develop miniature bone-muscle modules that can be assembled to create the full forearm structure.
- The forearm design has potential applications in areas like prosthetics, rehabilitation, and humanoid robotics.
Plain English Explanation
The paper describes a new way to design a robotic forearm that is similar to the human forearm. The key idea is to use small, modular components that mimic the bones and muscles in the human arm.
The human forearm can rotate the hand, which is an important function for many everyday tasks. The researchers wanted to create a robotic forearm that could also rotate the hand in a natural way, just like the human arm.
To do this, they developed small, modular "bone-muscle" components. These components can be assembled together to form the full structure of the forearm, including the bones and the muscles that control the motion. The modular design makes it easy to customize and scale the forearm as needed.
This human-like forearm design could be useful for things like prosthetic limbs, rehabilitation devices, and humanoid robots. By replicating the anatomy and function of the human forearm, these systems can interact with the world in a more natural and intuitive way.
Technical Explanation
The researchers in this paper developed a human-mimetic forearm design that uses miniature bone-muscle modules to replicate the radioulnar joint and rotational capabilities of the human forearm.
The key innovation is the design of the bone-muscle modules, which consist of a miniature bone segment and corresponding muscle actuators. These modules can be assembled in sequence to form the full forearm structure, including the ability to rotate the hand via the radioulnar joint.
The researchers conducted experiments to validate the performance of the bone-muscle modules and the overall forearm design. This included testing the range of motion, torque output, and other key metrics. The results showed that the robotic forearm could closely match the kinematics and dynamics of the human forearm.
The modular, human-mimetic approach has several advantages. It allows for customization and scaling of the forearm design. The use of miniature bone-muscle components also enables a more compact and lightweight structure compared to traditional robotic arm designs.
Critical Analysis
The paper provides a well-designed and thorough approach to creating a human-like robotic forearm. The use of modular bone-muscle components is a clever way to replicate the anatomy and function of the human arm.
However, the paper does not address some potential limitations or areas for further research. For example, it does not discuss the long-term reliability and durability of the bone-muscle modules, or how they might perform under heavy use or harsh environments.
Additionally, the paper focuses primarily on the mechanical design and does not delve into control algorithms or sensory feedback mechanisms that would be needed for the forearm to be truly integrated with a larger robotic system. Integrating the forearm with higher-level control and perception capabilities could be an important next step.
Overall, this research represents an important step towards more human-like robotic limbs, but continued work is needed to address the practical challenges of deploying such systems in real-world applications.
Conclusion
This paper presents a novel approach to designing a human-mimetic robotic forearm using miniature bone-muscle modules. The modular design allows for customization and replication of the key anatomical features of the human forearm, including the radioulnar joint that enables hand rotation.
The researchers demonstrated the feasibility of this approach through experimentation and validation of the forearm's kinematic and dynamic performance. This work has potential applications in prosthetics, rehabilitation, and humanoid robotics, where human-like limb functionality can enable more natural and intuitive interactions.
While the paper does not address all the practical challenges of deploying such a system, it represents an important step forward in the quest to create robotic limbs that closely mirror human form and function.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Human Mimetic Forearm Design with Radioulnar Joint using Miniature Bone-Muscle Modules and Its Applications
Kento Kawaharazuka, Shogo Makino, Masaya Kawamura, Yuki Asano, Yohei Kakiuchi, Kei Okada, Masayuki Inaba
The human forearm is composed of two long, thin bones called the radius and the ulna, and rotates using two axle joints. We aimed to develop a forearm based on the body proportion, weight ratio, muscle arrangement, and joint performance of the human body in order to bring out its benefits. For this, we need to miniaturize the muscle modules. To approach this task, we arranged two muscle motors inside one muscle module, and used the space effectively by utilizing common parts. In addition, we enabled the muscle module to also be used as the bone structure. Moreover, we used miniature motors and developed a way to dissipate the motor heat to the bone structure. Through these approaches, we succeeded in developing a forearm with a radioulnar joint based on the body proportion, weight ratio, muscle arrangement, and joint performance of the human body, while keeping maintainability and reliability. Also, we performed some motions such as soldering, opening a book, turning a screw, and badminton swinging using the benefits of the radioulnar structure, which have not been discussed before, and verified that Kengoro can realize skillful motions using the radioulnar joint like a human.
Read more8/20/2024

0
Replicating Human Anatomy with Vision Controlled Jetting -- A Pneumatic Musculoskeletal Hand and Forearm
Thomas Buchner (ETH Zurich, Switzerland), Stefan Weirich (ETH Zurich, Switzerland), Alexander M. Kubler (ETH Zurich, Switzerland), Wojciech Matusik (Inkbit, USA, CSAIL, MIT, USA), Robert K. Katzschmann (ETH Zurich, Switzerland)
The functional replication and actuation of complex structures inspired by nature is a longstanding goal for humanity. Creating such complex structures combining soft and rigid features and actuating them with artificial muscles would further our understanding of natural kinematic structures. We printed a biomimetic hand in a single print process comprised of a rigid skeleton, soft joint capsules, tendons, and printed touch sensors. We showed it's actuation using electric motors. In this work, we expand on this work by adding a forearm that is also closely modeled after the human anatomy and replacing the hand's motors with 22 independently controlled pneumatic artificial muscles (PAMs). Our thin, high-strain (up to 30.1%) PAMs match the performance of state-of-the-art artificial muscles at a lower cost. The system showcases human-like dexterity with independent finger movements, demonstrating successful grasping of various objects, ranging from a small, lightweight coin to a large can of 272g in weight. The performance evaluation, based on fingertip and grasping forces along with finger joint range of motion, highlights the system's potential.
Read more5/1/2024
🧪
0
Functional kinematic and kinetic requirements of the upper limb during activities of daily living: a recommendation on necessary joint capabilities for prosthetic arms
Christopher Herneth, Amartya Ganguly, Sami Haddadin
Prosthetic limb abandonment remains an unsolved challenge as amputees consistently reject their devices. Current prosthetic designs often fail to balance human-like perfomance with acceptable device weight, highlighting the need for optimised designs tailored to modern tasks. This study aims to provide a comprehensive dataset of joint kinematics and kinetics essential for performing activities of daily living (ADL), thereby informing the design of more functional and user-friendly prosthetic devices. Functionally required Ranges of Motion (ROM), velocities, and torques for the Glenohumeral (rotation), elbow, Radioulnar, and wrist joints were computed using motion capture data from 12 subjects performing 24 ADLs. Our approach included the computation of joint torques for varying mass and inertia properties of the upper limb, while torques induced by the manipulation of experimental objects were considered by their interaction wrench with the subjects hand. Joint torques pertaining to individual ADL scaled linearly with limb and object mass and mass distribution, permitting their generalisation to not explicitly simulated limb and object dynamics with linear regressors (LRM), exhibiting coefficients of determination R = 0.99 pm 0.01. Exemplifying an application of data-driven prosthesis design, we optimise wrist axes orientations for two serial and two differential joint configurations. Optimised axes reduced peak power requirements, between 22 to 38 percent compared to anatomical configurations, by exploiting high torque correlations between Ulnar deviation and wrist flexion/extension joints. This study offers critical insights into the functional requirements of upper limb prostheses, providing a valuable foundation for data-driven prosthetic design that addresses key user concerns and enhances device adoption.
Read more8/27/2024
0
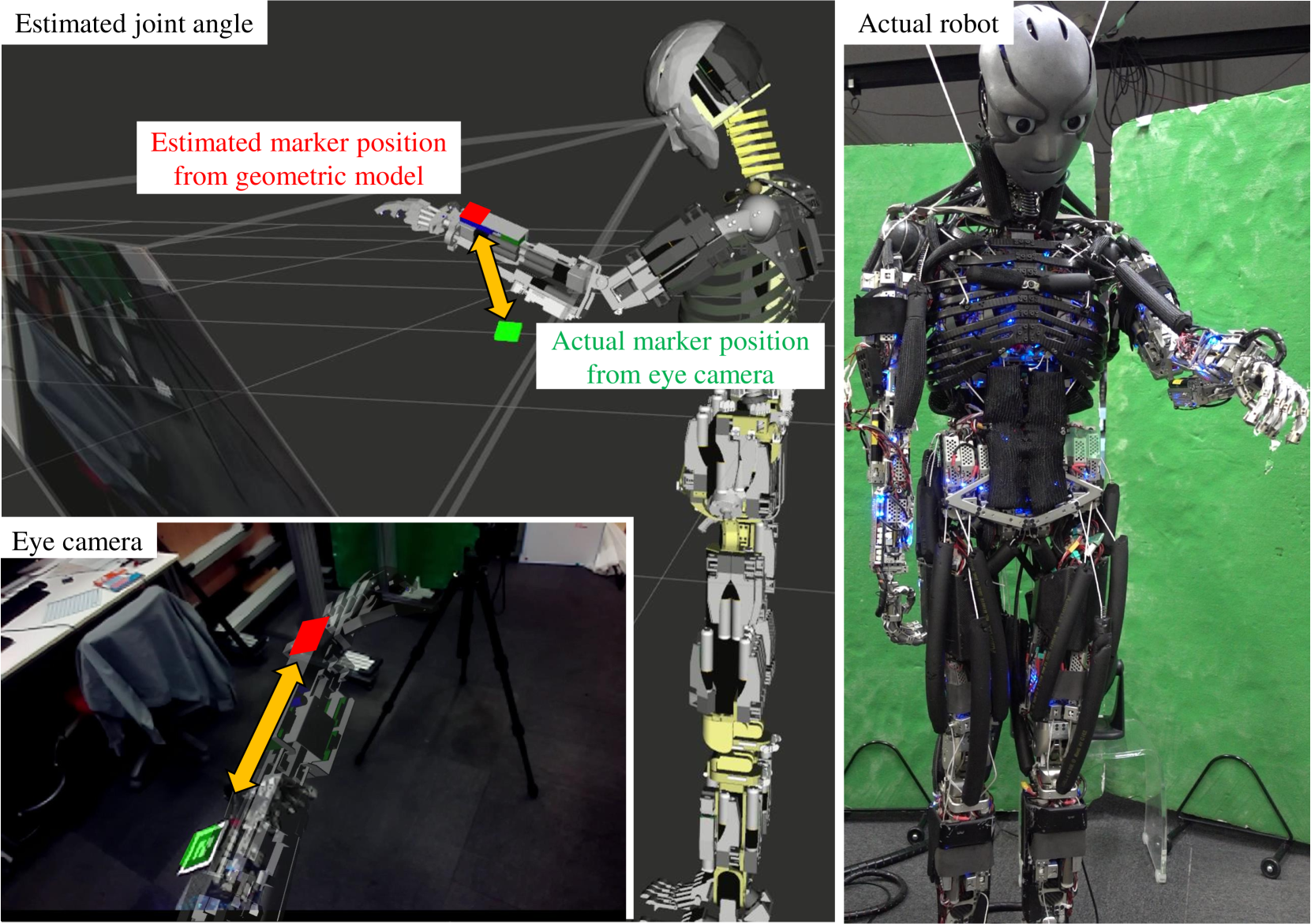
Online Learning of Joint-Muscle Mapping Using Vision in Tendon-driven Musculoskeletal Humanoids
Kento Kawaharazuka, Shogo Makino, Masaya Kawamura, Yuki Asano, Kei Okada, Masayuki Inaba
The body structures of tendon-driven musculoskeletal humanoids are complex, and accurate modeling is difficult, because they are made by imitating the body structures of human beings. For this reason, we have not been able to move them accurately like ordinary humanoids driven by actuators in each axis, and large internal muscle tension and slack of tendon wires have emerged by the model error between its geometric model and the actual robot. Therefore, we construct a joint-muscle mapping (JMM) using a neural network (NN), which expresses a nonlinear relationship between joint angles and muscle lengths, and aim to move tendon-driven musculoskeletal humanoids accurately by updating the JMM online from data of the actual robot. In this study, the JMM is updated online by using the vision of the robot so that it moves to the correct position (Vision Updater). Also, we execute another update to modify muscle antagonisms correctly (Antagonism Updater). By using these two updaters, the error between the target and actual joint angles decrease to about 40% in 5 minutes, and we show through a manipulation experiment that the tendon-driven musculoskeletal humanoid Kengoro becomes able to move as intended. This novel system can adapt to the state change and growth of robots, because it updates the JMM online successively.
Read more4/9/2024