A Hybrid-Layered System for Image-Guided Navigation and Robot Assisted Spine Surgery

0
❗
Sign in to get full access
Overview
- This paper presents the development of a Robot-Assisted and Navigation-Guided Image-Guided Spine Surgery (IGSS) System.
- The system aims to improve surgical precision and reduce user radiation exposure compared to manual surgical methods.
- The authors propose an IGSS workflow and system architecture using a hybrid-layered approach to create an affordable, scalable, and reconfigurable system.
- The system was extensively tested on phantoms and cadavers, demonstrating high accuracy and performance.
Plain English Explanation
The paper describes the creation of a new surgical system for spine procedures that combines robot assistance and navigation guidance. This is in response to the growing demand for more precise and cost-effective solutions for Image-Guided Spine Surgery (IGSS).
The key idea is to integrate advanced technologies, like robotic arms and navigation software, to improve the accuracy and safety of spine surgeries. This helps address the limitations of traditional manual surgical methods, which can lack precision and expose the surgeon to harmful radiation from imaging equipment.
The authors developed a specialized workflow and system architecture that blends different approaches to create an affordable, scalable, and adaptable IGSS solution. They thoroughly tested the system on artificial models and cadavers, and the results show very high accuracy - around 1 mm on average. This level of precision is on par with or better than existing commercial systems, while also reducing the amount of radiation exposure for the surgical team.
Overall, this new IGSS system represents an important advancement that could lead to better outcomes for patients undergoing complex spine procedures. By integrating robotics and navigation technology, surgeons can perform these delicate operations with greater confidence and reduced risk.
Technical Explanation
The paper presents the development of a Robot-Assisted and Navigation-Guided Image-Guided Spine Surgery (IGSS) System. The authors employed a hybrid-layered approach, combining modular and integrated system architectures in distinct layers, to create an affordable, scalable, and reconfigurable IGSS solution.
The system architecture includes a robotic arm for assisted pedicle screw placement, a navigation module for real-time tracking and guidance, and a C-Arm for intraoperative imaging. The authors developed and integrated these components to create a seamless IGSS workflow.
Extensive testing was conducted on phantoms and cadavers to evaluate the system's performance. On phantoms, the navigation guidance accuracy was 1.020 mm, and the robot assistance accuracy was 1.11 mm. In cadaveric validation, 84% of screw placements were grade A and 10% were grade B using navigation guidance, while 90% were grade A and 10% were grade B using robot assistance, as per the Gertzbein-Robbins scale.
Importantly, the system requires only an average of 3 C-Arm images per pedicle screw placement and verification, which is lower than the radiation exposure reported in the literature for existing IGSS systems. This demonstrates the system's ability to limit user radiation exposure while maintaining high surgical accuracy.
Critical Analysis
The authors have clearly addressed the growing need for precise and affordable IGSS solutions by developing a comprehensive system that integrates cutting-edge robotic and navigation technologies. The hybrid-layered approach to the system architecture is a novel and promising solution to achieve the required scalability, reconfigurability, and cost-effectiveness.
However, the paper does not provide much detail on the specific technical challenges encountered during the system development and integration process. Additionally, while the validation results on phantoms and cadavers are promising, the authors do not discuss the potential limitations or sources of error in these experimental setups.
It would be valuable to see further evaluation of the system's performance in real-world clinical settings, including assessments of its usability, integration with existing hospital workflows, and long-term durability. Additionally, a comparison of the system's cost-effectiveness compared to other commercially available IGSS solutions would help contextualize the claimed affordability of the proposed system.
Overall, the research presented in this paper represents a significant advancement in the field of Image-Guided Spine Surgery and lays the groundwork for further development and real-world deployment of such robot-assisted and navigation-guided surgical systems.
Conclusion
This paper describes the development of a comprehensive Robot-Assisted and Navigation-Guided Image-Guided Spine Surgery (IGSS) System. The authors have employed a hybrid-layered approach to create an affordable, scalable, and reconfigurable solution that addresses the limitations of manual surgical methods.
The extensive testing on phantoms and cadavers has demonstrated the system's high accuracy, with navigation guidance and robot assistance achieving average errors of around 1 mm. Importantly, the system's radiation exposure for the surgical team is lower than that reported for existing IGSS systems.
Overall, this research represents a significant advancement in the field of Image-Guided Spine Surgery and paves the way for the wider adoption of robot-assisted and navigation-guided surgical systems in clinical practice. The improved precision and reduced radiation exposure could lead to better outcomes for patients undergoing complex spine procedures.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
❗
0
A Hybrid-Layered System for Image-Guided Navigation and Robot Assisted Spine Surgery
Suhail Ansari T, Vivek Maik, Minhas Naheem, Keerthi Ram, Manojkumar Lakshmanan, Mohanasankar Sivaprakasam
In response to the growing demand for precise and affordable solutions for Image-Guided Spine Surgery (IGSS), this paper presents a comprehensive development of a Robot-Assisted and Navigation-Guided IGSS System. The endeavor involves integrating cutting-edge technologies to attain the required surgical precision and limit user radiation exposure, thereby addressing the limitations of manual surgical methods. We propose an IGSS workflow and system architecture employing a hybrid-layered approach, combining modular and integrated system architectures in distinctive layers to develop an affordable system for seamless integration, scalability, and reconfigurability. We developed and integrated the system and extensively tested it on phantoms and cadavers. The proposed system's accuracy using navigation guidance is 1.020 mm, and robot assistance is 1.11 mm on phantoms. Observing a similar performance in cadaveric validation where 84% of screw placements were grade A, 10% were grade B using navigation guidance, 90% were grade A, and 10% were grade B using robot assistance as per the Gertzbein-Robbins scale, proving its efficacy for an IGSS. The evaluated performance is adequate for an IGSS and at par with the existing systems in literature and those commercially available. The user radiation is lower than in the literature, given that the system requires only an average of 3 C-Arm images per pedicle screw placement and verification
Read more6/10/2024
🎯
0
The control architecture of a spherical robot for Minimally Invasive Surgery
Gabriela Rus (UMP), Nadim Al Hajjar (UMP), Paul Tucan (UMP), Ionut Zima (UMP), Calin Vaida (UMP), Corina Radu (UMP), Daniel Jucan (LS2N, LS2N - 'equipe RoMas), Damien Chablat (LS2N, LS2N - 'equipe RoMas), Doina Pisla
Control systems used in Minimally Invasive Surgery (MIS) play a crucial role in ensuring preci-sion and safety throughout procedures. This paper presents a control architecture developed for a robotic system designed for MIS operations. The modular structure of the control system allows for compatibility with a range of procedures in abdominal and thoracic regions. The proposed control system, employing the master-slave concept, is presented alongside the experimental model. Functional validation is obtained by performing a Siemens NX simulation and comparing the results with several experimental runs using the experimental model of the robot. With its compact size and stiffness, the system holds promise for integration with other robotic systems. Future efforts will be dedicated to exploring and optimizing this potential collaboration to enhance the overall capabilities of robotic-assisted surgery.
Read more7/12/2024
0
Visual Attention Based Cognitive Human-Robot Collaboration for Pedicle Screw Placement in Robot-Assisted Orthopedic Surgery
Chen Chen, Qikai Zou, Yuhang Song, Shiji Song, Xiang Li
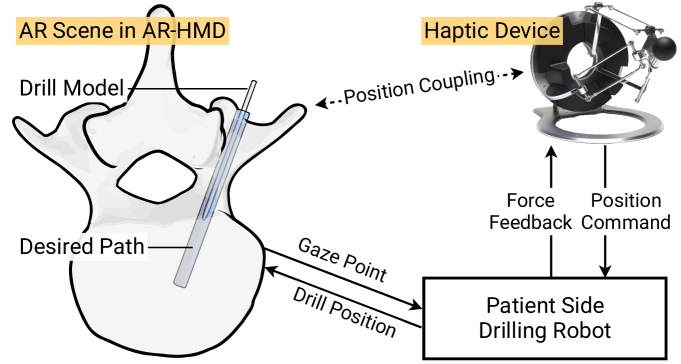
Current orthopedic robotic systems largely focus on navigation, aiding surgeons in positioning a guiding tube but still requiring manual drilling and screw placement. The automation of this task not only demands high precision and safety due to the intricate physical interactions between the surgical tool and bone but also poses significant risks when executed without adequate human oversight. As it involves continuous physical interaction, the robot should collaborate with the surgeon, understand the human intent, and always include the surgeon in the loop. To achieve this, this paper proposes a new cognitive human-robot collaboration framework, including the intuitive AR-haptic human-robot interface, the visual-attention-based surgeon model, and the shared interaction control scheme for the robot. User studies on a robotic platform for orthopedic surgery are presented to illustrate the performance of the proposed method. The results demonstrate that the proposed human-robot collaboration framework outperforms full robot and full human control in terms of safety and ergonomics.
Read more5/16/2024

0
A Patient-Specific Framework for Autonomous Spinal Fixation via a Steerable Drilling Robot
Susheela Sharma, Sarah Go, Zeynep Yakay, Yash Kulkarni, Siddhartha Kapuria, Jordan P. Amadio, Mohsen Khadem, Nassir Navab, Farshid Alambeigi
In this paper, with the goal of enhancing the minimally invasive spinal fixation procedure in osteoporotic patients, we propose a first-of-its-kind image-guided robotic framework for performing an autonomous and patient-specific procedure using a unique concentric tube steerable drilling robot (CT-SDR). Particularly, leveraging a CT-SDR, we introduce the concept of J-shape drilling based on a pre-operative trajectory planned in CT scan of a patient followed by appropriate calibration, registration, and navigation steps to safely execute this trajectory in real-time using our unique robotic setup. To thoroughly evaluate the performance of our framework, we performed several experiments on two different vertebral phantoms designed based on CT scan of real patients.
Read more7/9/2024