Incremental Learning of Humanoid Robot Behavior from Natural Interaction and Large Language Models

0
🌿
Sign in to get full access
Overview
- This paper proposes a system that allows robots to learn complex behaviors through natural language interaction with humans.
- The system uses Large Language Models (LLMs) to orchestrate the robot's behavior, with the LLM generating Python code to control the robot's perception and actions.
- The key innovation is the ability to learn from mistakes, with the LLM calling another LLM to improve the interaction based on human feedback, and storing the improved interaction in the robot's memory for future use.
Plain English Explanation
The paper describes a way for robots to learn new skills and behaviors by interacting with humans using natural language. The idea is that the robot can have a conversation with a person, and if it doesn't understand a command or does something wrong, the person can give feedback to help the robot improve.
The system uses advanced language models to control the robot's actions. When a person gives a command, the language model generates some Python code that tells the robot what to do. If the robot doesn't do it right, the person can explain what went wrong, and the language model can call another model to figure out how to fix the code and do it better next time.
This allows the robot to gradually learn new skills over time, by learning from its mistakes and incorporating the human feedback. It's kind of like a robot learning from a teacher, where the teacher can point out when the robot is doing something wrong and help it improve.
Technical Explanation
The paper presents a system that combines Large Language Models (LLMs) with a robot's cognitive architecture to enable incremental learning of complex behaviors through natural language interaction.
The key components are:
- LLM-based Behavior Orchestration: The LLM generates Python code to control the robot's perception and action capabilities, allowing high-level command execution.
- Incremental Prompt Learning: If the robot makes a mistake, the LLM can call another LLM responsible for improving the current interaction based on human feedback. The improved interaction is then saved in the robot's memory for future use.
- Integration with Robot Cognitive Architecture: The system is integrated into the ARMAR-6 humanoid robot's cognitive architecture, enabling evaluation in both simulation and the real world.
The authors demonstrate the system's ability to incrementally learn generalized knowledge through a series of experiments, showing how the robot can improve its performance over time based on human input.
Critical Analysis
The paper presents an interesting approach to enabling robots to learn from natural language interaction, which is a key challenge in the field of human-robot interaction. The use of LLMs to orchestrate the robot's behavior and provide incremental learning capabilities is a novel contribution.
However, the paper does not address some potential limitations and areas for further research:
-
Robustness and Scalability: The authors only evaluate the system in a limited set of scenarios. More research is needed to understand how well the approach scales to more complex and diverse tasks, and how robust it is to variations in language, environment, and user expectations.
-
Ethical Considerations: As robots become more capable of learning from humans, there are important ethical questions to consider around the nature of the human-robot relationship, the potential for biases or misunderstandings to be learned, and the responsibility for the robot's actions.
-
Computational Efficiency: The use of multiple LLMs and the need for interactive feedback loops may raise concerns about the computational resources required to run the system, especially on resource-constrained robot platforms.
Despite these potential limitations, the research presented in this paper represents an important step forward in enabling more natural and adaptive human-robot interaction, which could have significant implications for a wide range of applications.
Conclusion
This paper proposes an innovative system that allows robots to learn complex behaviors through natural language interaction with humans. By combining Large Language Models with a robot's cognitive architecture, the system enables incremental learning, where the robot can improve its performance over time based on feedback and learn new skills from its interactions.
While the research has some limitations that need further exploration, the ability to enable robots to learn and adapt through natural communication with humans is a significant advancement in the field of human-robot interaction. As robots become more integrated into our daily lives, this type of technology could help make their interactions more intuitive, responsive, and beneficial to users.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌿
0
Incremental Learning of Humanoid Robot Behavior from Natural Interaction and Large Language Models
Leonard Barmann, Rainer Kartmann, Fabian Peller-Konrad, Jan Niehues, Alex Waibel, Tamim Asfour
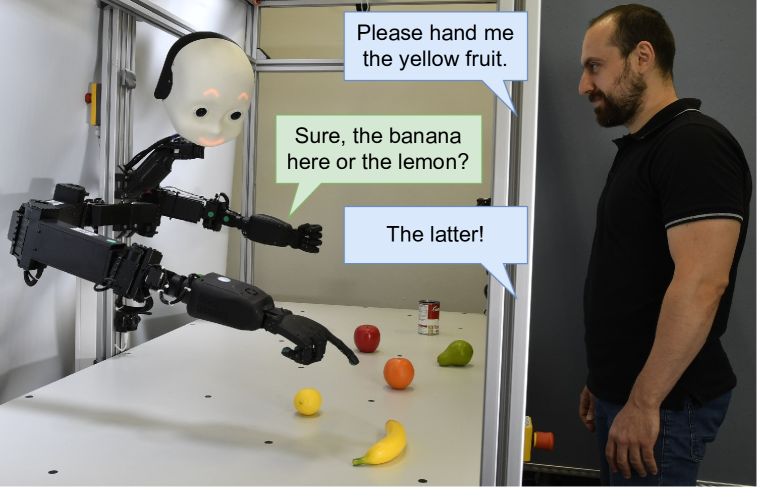
Natural-language dialog is key for intuitive human-robot interaction. It can be used not only to express humans' intents, but also to communicate instructions for improvement if a robot does not understand a command correctly. Of great importance is to endow robots with the ability to learn from such interaction experience in an incremental way to allow them to improve their behaviors or avoid mistakes in the future. In this paper, we propose a system to achieve incremental learning of complex behavior from natural interaction, and demonstrate its implementation on a humanoid robot. Building on recent advances, we present a system that deploys Large Language Models (LLMs) for high-level orchestration of the robot's behavior, based on the idea of enabling the LLM to generate Python statements in an interactive console to invoke both robot perception and action. The interaction loop is closed by feeding back human instructions, environment observations, and execution results to the LLM, thus informing the generation of the next statement. Specifically, we introduce incremental prompt learning, which enables the system to interactively learn from its mistakes. For that purpose, the LLM can call another LLM responsible for code-level improvements of the current interaction based on human feedback. The improved interaction is then saved in the robot's memory, and thus retrieved on similar requests. We integrate the system in the robot cognitive architecture of the humanoid robot ARMAR-6 and evaluate our methods both quantitatively (in simulation) and qualitatively (in simulation and real-world) by demonstrating generalized incrementally-learned knowledge.
Read more5/17/2024
0
When Robots Get Chatty: Grounding Multimodal Human-Robot Conversation and Collaboration
Philipp Allgeuer, Hassan Ali, Stefan Wermter
We investigate the use of Large Language Models (LLMs) to equip neural robotic agents with human-like social and cognitive competencies, for the purpose of open-ended human-robot conversation and collaboration. We introduce a modular and extensible methodology for grounding an LLM with the sensory perceptions and capabilities of a physical robot, and integrate multiple deep learning models throughout the architecture in a form of system integration. The integrated models encompass various functions such as speech recognition, speech generation, open-vocabulary object detection, human pose estimation, and gesture detection, with the LLM serving as the central text-based coordinating unit. The qualitative and quantitative results demonstrate the huge potential of LLMs in providing emergent cognition and interactive language-oriented control of robots in a natural and social manner.
Read more7/2/2024
0
LaMI: Large Language Models for Multi-Modal Human-Robot Interaction
Chao Wang, Stephan Hasler, Daniel Tanneberg, Felix Ocker, Frank Joublin, Antonello Ceravola, Joerg Deigmoeller, Michael Gienger
This paper presents an innovative large language model (LLM)-based robotic system for enhancing multi-modal human-robot interaction (HRI). Traditional HRI systems relied on complex designs for intent estimation, reasoning, and behavior generation, which were resource-intensive. In contrast, our system empowers researchers and practitioners to regulate robot behavior through three key aspects: providing high-level linguistic guidance, creating atomic actions and expressions the robot can use, and offering a set of examples. Implemented on a physical robot, it demonstrates proficiency in adapting to multi-modal inputs and determining the appropriate manner of action to assist humans with its arms, following researchers' defined guidelines. Simultaneously, it coordinates the robot's lid, neck, and ear movements with speech output to produce dynamic, multi-modal expressions. This showcases the system's potential to revolutionize HRI by shifting from conventional, manual state-and-flow design methods to an intuitive, guidance-based, and example-driven approach. Supplementary material can be found at https://hri-eu.github.io/Lami/
Read more4/12/2024
📈
0
Enhancing the LLM-Based Robot Manipulation Through Human-Robot Collaboration
Haokun Liu, Yaonan Zhu, Kenji Kato, Atsushi Tsukahara, Izumi Kondo, Tadayoshi Aoyama, Yasuhisa Hasegawa
Large Language Models (LLMs) are gaining popularity in the field of robotics. However, LLM-based robots are limited to simple, repetitive motions due to the poor integration between language models, robots, and the environment. This paper proposes a novel approach to enhance the performance of LLM-based autonomous manipulation through Human-Robot Collaboration (HRC). The approach involves using a prompted GPT-4 language model to decompose high-level language commands into sequences of motions that can be executed by the robot. The system also employs a YOLO-based perception algorithm, providing visual cues to the LLM, which aids in planning feasible motions within the specific environment. Additionally, an HRC method is proposed by combining teleoperation and Dynamic Movement Primitives (DMP), allowing the LLM-based robot to learn from human guidance. Real-world experiments have been conducted using the Toyota Human Support Robot for manipulation tasks. The outcomes indicate that tasks requiring complex trajectory planning and reasoning over environments can be efficiently accomplished through the incorporation of human demonstrations.
Read more7/2/2024