Domain Adaptation for Offline Reinforcement Learning with Limited Samples

0
Sign in to get full access
Overview
- Domain adaptation for offline reinforcement learning with limited samples
- Leverages data from a related domain to improve performance in the target domain
- Addresses challenges of offline RL with limited data
Plain English Explanation
In the field of reinforcement learning (RL), the ability to learn from limited data is crucial, as collecting large datasets of real-world interactions can be costly and time-consuming. The paper "Domain Adaptation for Offline Reinforcement Learning with Limited Samples" explores a technique to address this challenge by leveraging data from a related domain to improve performance in the target domain.
Offline RL, where the agent learns from a fixed dataset without any online interaction, is particularly susceptible to the problem of limited data. This paper proposes a domain adaptation approach that allows the agent to utilize unlabeled data from a related domain to enhance its learning in the target domain, even when the target domain dataset is small.
The key idea is to learn a mapping between the related domain and the target domain, enabling the agent to transfer knowledge and improve its performance in the target domain. This approach can be particularly useful in scenarios where diverse datasets are available, but the specific task of interest has limited data.
Technical Explanation
The paper proposes a domain adaptation framework for offline RL, which consists of two main components:
-
Domain Adaptation Module: This module learns a mapping between the related domain and the target domain, allowing the agent to leverage knowledge from the related domain to improve its performance in the target domain.
-
Offline RL Algorithm: The offline RL algorithm used in this framework is based on model-based RL, which learns a dynamics model from the available data and uses it to plan and generate synthetic experiences for training.
The key contributions of the paper are:
- Developing a domain adaptation approach for offline RL that can effectively utilize data from a related domain to enhance performance in the target domain.
- Proposing a novel optimization objective that jointly learns the domain adaptation mapping and the offline RL dynamics model.
- Demonstrating the effectiveness of the proposed approach on several benchmark RL tasks, where it outperforms both standard offline RL and naive domain adaptation methods.
Critical Analysis
The paper addresses an important challenge in RL, namely the limited availability of data for training agents in real-world scenarios. The domain adaptation approach presented is a promising solution, as it can leverage data from related domains to improve performance in the target domain.
One potential limitation of the approach is that the success of the domain adaptation may be heavily dependent on the similarity between the related domain and the target domain. If the domains are too dissimilar, the learned mapping may not be effective, and the benefits of domain adaptation may be limited.
Additionally, the paper does not provide a thorough analysis of the computational complexity or the scalability of the proposed approach. As the problem size and the number of domains increase, the computational overhead of the domain adaptation module may become a concern.
Further research could explore ways to mitigate the challenges of imbalanced datasets in offline RL, as well as investigate the generalization of the domain adaptation approach to more diverse datasets.
Conclusion
The paper "Domain Adaptation for Offline Reinforcement Learning with Limited Samples" presents a promising approach to address the challenge of limited data in offline RL. By leveraging data from a related domain, the proposed framework can enhance the agent's performance in the target domain, even when the available data is scarce.
This work has the potential to significantly impact the practical application of RL in real-world scenarios, where data collection can be a significant bottleneck. Further research and development in this area could lead to more efficient and data-driven RL systems, ultimately enabling the widespread adoption of this powerful technique.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Domain Adaptation for Offline Reinforcement Learning with Limited Samples
Weiqin Chen, Sandipan Mishra, Santiago Paternain
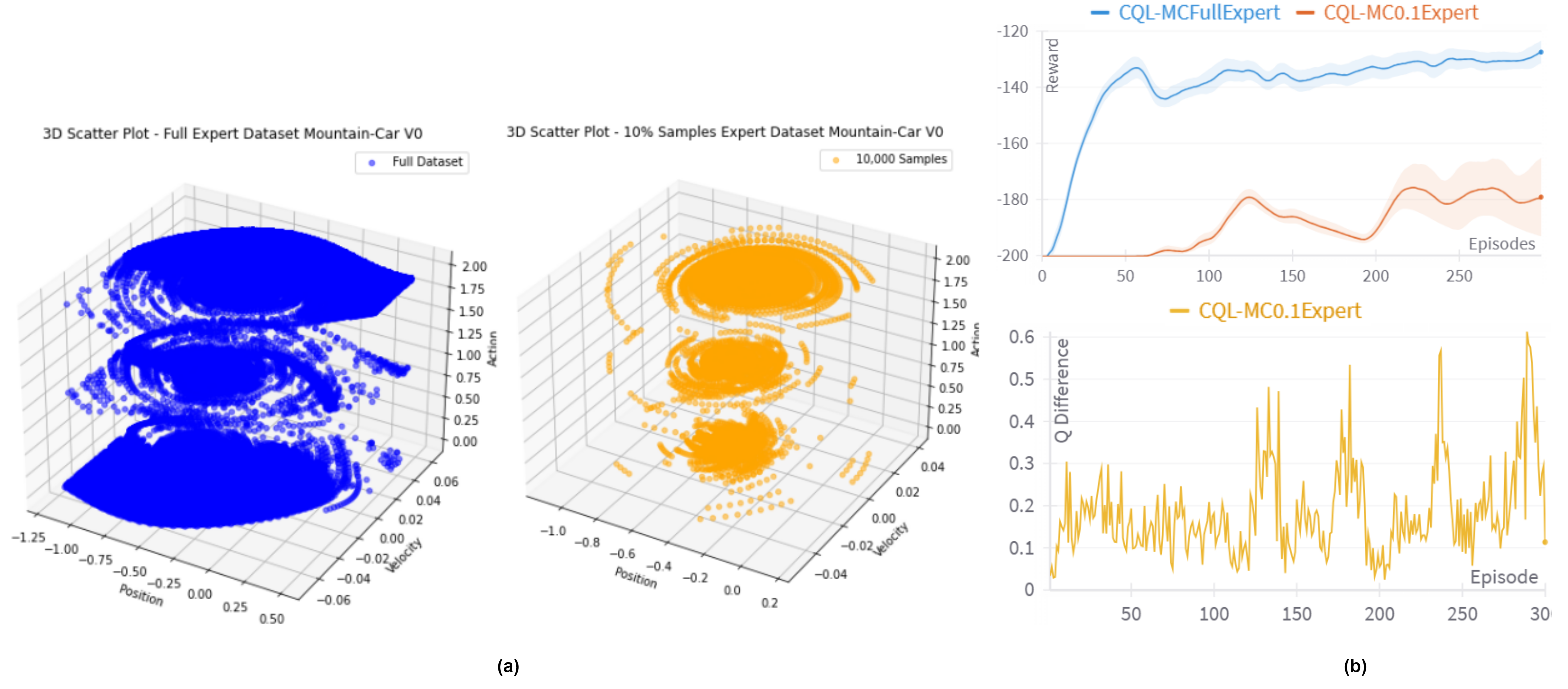
Offline reinforcement learning (RL) learns effective policies from a static target dataset. Despite state-of-the-art (SOTA) offline RL algorithms being promising, they highly rely on the quality of the target dataset. The performance of SOTA algorithms can degrade in scenarios with limited samples in the target dataset, which is often the case in real-world applications. To address this issue, domain adaptation that leverages auxiliary samples from related source datasets (such as simulators) can be beneficial. In this context, determining the optimal way to trade off the source and target datasets remains a critical challenge in offline RL. To the best of our knowledge, this paper proposes the first framework that theoretically and experimentally explores how the weight assigned to each dataset affects the performance of offline RL. We establish the performance bounds and convergence neighborhood of our framework, both of which depend on the selection of the weight. Furthermore, we identify the existence of an optimal weight for balancing the two datasets. All theoretical guarantees and optimal weight depend on the quality of the source dataset and the size of the target dataset. Our empirical results on the well-known Procgen Benchmark substantiate our theoretical contributions.
Read more8/23/2024
0
Integrating Domain Knowledge for handling Limited Data in Offline RL
Briti Gangopadhyay, Zhao Wang, Jia-Fong Yeh, Shingo Takamatsu
With the ability to learn from static datasets, Offline Reinforcement Learning (RL) emerges as a compelling avenue for real-world applications. However, state-of-the-art offline RL algorithms perform sub-optimally when confronted with limited data confined to specific regions within the state space. The performance degradation is attributed to the inability of offline RL algorithms to learn appropriate actions for rare or unseen observations. This paper proposes a novel domain knowledge-based regularization technique and adaptively refines the initial domain knowledge to considerably boost performance in limited data with partially omitted states. The key insight is that the regularization term mitigates erroneous actions for sparse samples and unobserved states covered by domain knowledge. Empirical evaluations on standard discrete environment datasets demonstrate a substantial average performance increase of at least 27% compared to existing offline RL algorithms operating on limited data.
Read more6/12/2024

0
An Offline Adaptation Framework for Constrained Multi-Objective Reinforcement Learning
Qian Lin, Zongkai Liu, Danying Mo, Chao Yu
In recent years, significant progress has been made in multi-objective reinforcement learning (RL) research, which aims to balance multiple objectives by incorporating preferences for each objective. In most existing studies, specific preferences must be provided during deployment to indicate the desired policies explicitly. However, designing these preferences depends heavily on human prior knowledge, which is typically obtained through extensive observation of high-performing demonstrations with expected behaviors. In this work, we propose a simple yet effective offline adaptation framework for multi-objective RL problems without assuming handcrafted target preferences, but only given several demonstrations to implicitly indicate the preferences of expected policies. Additionally, we demonstrate that our framework can naturally be extended to meet constraints on safety-critical objectives by utilizing safe demonstrations, even when the safety thresholds are unknown. Empirical results on offline multi-objective and safe tasks demonstrate the capability of our framework to infer policies that align with real preferences while meeting the constraints implied by the provided demonstrations.
Read more9/17/2024

0
Augmenting Offline RL with Unlabeled Data
Zhao Wang, Briti Gangopadhyay, Jia-Fong Yeh, Shingo Takamatsu
Recent advancements in offline Reinforcement Learning (Offline RL) have led to an increased focus on methods based on conservative policy updates to address the Out-of-Distribution (OOD) issue. These methods typically involve adding behavior regularization or modifying the critic learning objective, focusing primarily on states or actions with substantial dataset support. However, we challenge this prevailing notion by asserting that the absence of an action or state from a dataset does not necessarily imply its suboptimality. In this paper, we propose a novel approach to tackle the OOD problem. We introduce an offline RL teacher-student framework, complemented by a policy similarity measure. This framework enables the student policy to gain insights not only from the offline RL dataset but also from the knowledge transferred by a teacher policy. The teacher policy is trained using another dataset consisting of state-action pairs, which can be viewed as practical domain knowledge acquired without direct interaction with the environment. We believe this additional knowledge is key to effectively solving the OOD issue. This research represents a significant advancement in integrating a teacher-student network into the actor-critic framework, opening new avenues for studies on knowledge transfer in offline RL and effectively addressing the OOD challenge.
Read more6/12/2024