Integrating GNN and Neural ODEs for Estimating Two-Body Interactions in Mixed-Species Collective Motion

0
Sign in to get full access
Overview
- This paper proposes a novel approach that combines Graph Neural Networks (GNNs) and Neural Ordinary Differential Equations (Neural ODEs) to model and estimate two-body interactions in mixed-species collective motion.
- The researchers aim to develop a more accurate and efficient model for understanding the complex dynamics involved in collective movement, which has applications in various fields such as biology, robotics, and surveillance.
Plain English Explanation
The researchers in this paper are trying to understand how different animals or objects move together in a group. This is called "collective motion," and it's a complex phenomenon that scientists study to learn more about animal behavior, improve robot coordination, and even monitor crowds.
The key idea is to use two powerful machine learning techniques - Graph Neural Networks (GNNs) and Neural Ordinary Differential Equations (Neural ODEs) - to model the interactions between individuals in the group. GNNs can capture the relationships between the animals or objects, while Neural ODEs can describe how their motion changes over time.
By combining these methods, the researchers hope to create a more accurate model of the two-body interactions that drive collective motion, even in situations where the group is made up of different species or types of individuals. This could lead to better understanding of animal behavior, more effective robot swarms, and improved crowd monitoring systems.
Technical Explanation
The paper proposes an approach that integrates Graph Neural Networks (GNNs) and Neural Ordinary Differential Equations (Neural ODEs) to model and estimate two-body interactions in mixed-species collective motion.
The key elements of the proposed method include:
- Using a GNN to capture the relational structure of the group and encode the interactions between individuals.
- Employing a Neural ODE to model the temporal dynamics of the collective motion, describing how the positions and velocities of the individuals change over time.
- Jointly optimizing the GNN and Neural ODE components to accurately estimate the underlying two-body interaction forces that govern the observed collective motion.
The researchers demonstrate the effectiveness of their approach through experiments on synthetic and real-world datasets, including examples of two-person interactions and complex network dynamics. Their results show that the integrated GNN-Neural ODE model can outperform alternative methods in accurately recovering the two-body interaction forces and predicting the future states of the collective motion system.
Critical Analysis
The paper presents a promising approach for modeling and estimating two-body interactions in mixed-species collective motion. However, the researchers acknowledge several caveats and limitations:
- The method relies on having access to detailed position and velocity data for all individuals in the group, which may not be readily available in real-world scenarios.
- The proposed model assumes that the two-body interactions can be accurately represented by a relatively simple functional form, which may not capture the full complexity of the underlying dynamics.
- The experiments are conducted on a limited set of synthetic and real-world datasets, and further validation on a wider range of collective motion scenarios would be beneficial to assess the generalizability of the approach.
Additionally, one could raise the following concerns:
- The paper does not discuss how the method would scale to handle large groups of individuals or cases where the group composition changes over time.
- The interpretation and applicability of the estimated two-body interaction forces may be limited, as the model does not provide direct insights into the underlying biological or physical mechanisms driving the collective motion.
Conclusion
This paper presents an innovative approach that combines GNNs and Neural ODEs to model and estimate two-body interactions in mixed-species collective motion. The integrated model shows promising results in accurately recovering the underlying interaction forces and predicting the future states of the collective motion system.
The research has the potential to advance our understanding of collective behavior in various domains, such as animal ecology, robotics, and crowd monitoring. By providing a more accurate and efficient way to model the complex dynamics involved in group movement, the proposed method could lead to better-informed decision-making and improved real-world applications.
However, the researchers acknowledge several limitations and caveats that should be addressed in future work. Continued refinement and broader validation of the approach will be important to strengthen its practical utility and impact.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Integrating GNN and Neural ODEs for Estimating Two-Body Interactions in Mixed-Species Collective Motion
Masahito Uwamichi, Simon K. Schnyder, Tetsuya J. Kobayashi, Satoshi Sawai
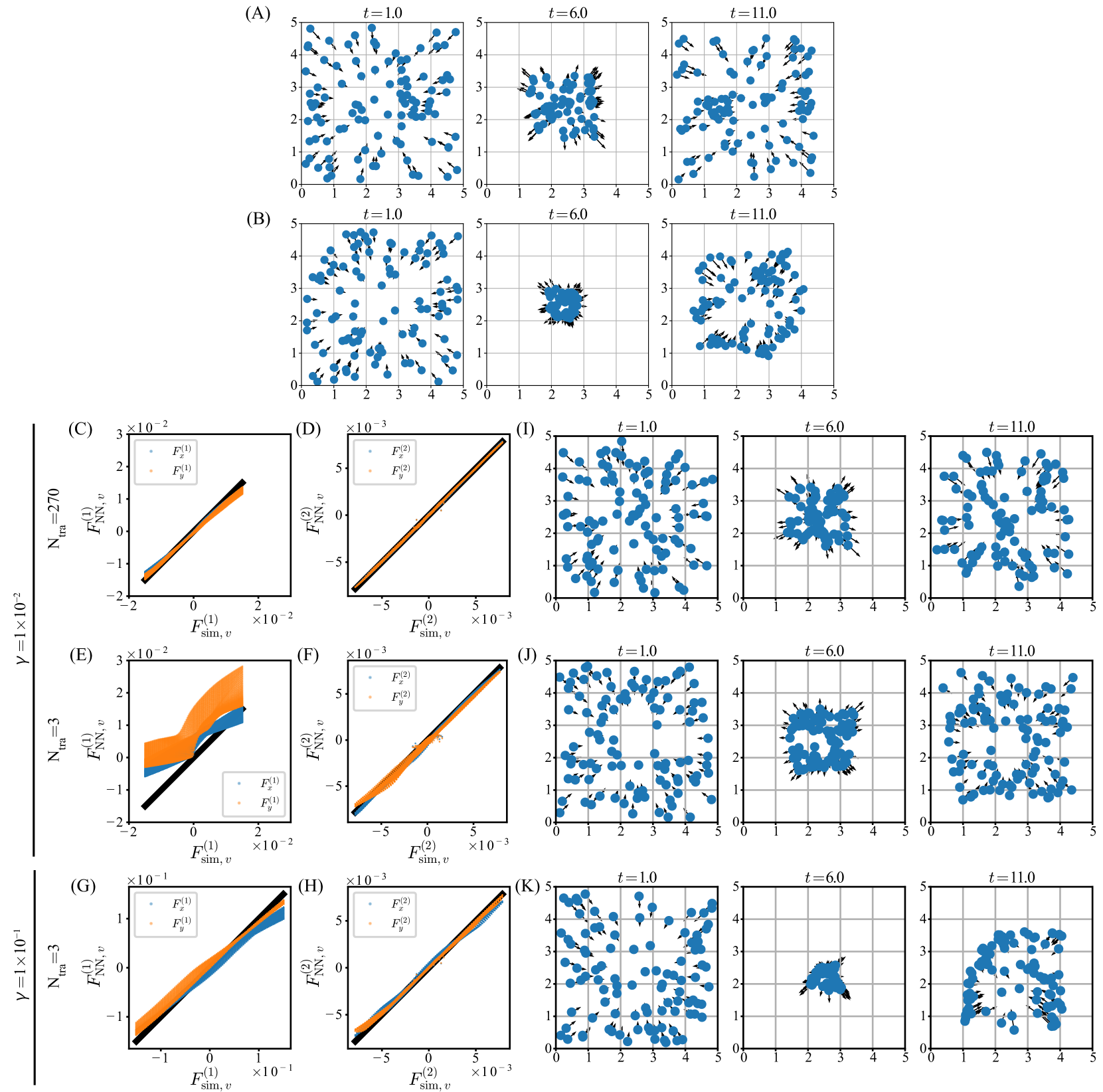
Analyzing the motion of multiple biological agents, be it cells or individual animals, is pivotal for the understanding of complex collective behaviors. With the advent of advanced microscopy, detailed images of complex tissue formations involving multiple cell types have become more accessible in recent years. However, deciphering the underlying rules that govern cell movements is far from trivial. Here, we present a novel deep learning framework to estimate the underlying equations of motion from observed trajectories, a pivotal step in decoding such complex dynamics. Our framework integrates graph neural networks with neural differential equations, enabling effective prediction of two-body interactions based on the states of the interacting entities. We demonstrate the efficacy of our approach through two numerical experiments. First, we used a simulated data from a toy model to tune the hyperparameters. Based on the obtained hyperparameters, we then applied this approach to a more complex model that describes interacting cells of cellular slime molds. Our results show that the proposed method can accurately estimate the function of two-body interactions, thereby precisely replicating both individual and collective behaviors within these systems.
Read more5/28/2024
🤿
0
Learning Dynamics from Multicellular Graphs with Deep Neural Networks
Haiqian Yang, Florian Meyer, Shaoxun Huang, Liu Yang, Cristiana Lungu, Monilola A. Olayioye, Markus J. Buehler, Ming Guo
Multicellular self-assembly into functional structures is a dynamic process that is critical in the development and diseases, including embryo development, organ formation, tumor invasion, and others. Being able to infer collective cell migratory dynamics from their static configuration is valuable for both understanding and predicting these complex processes. However, the identification of structural features that can indicate multicellular motion has been difficult, and existing metrics largely rely on physical instincts. Here we show that using a graph neural network (GNN), the motion of multicellular collectives can be inferred from a static snapshot of cell positions, in both experimental and synthetic datasets.
Read more7/9/2024

0
Decomposing heterogeneous dynamical systems with graph neural networks
C'edric Allier, Magdalena C. Schneider, Michael Innerberger, Larissa Heinrich, John A. Bogovic, Stephan Saalfeld
Natural physical, chemical, and biological dynamical systems are often complex, with heterogeneous components interacting in diverse ways. We show that graph neural networks can be designed to jointly learn the interaction rules and the structure of the heterogeneity from data alone. The learned latent structure and dynamics can be used to virtually decompose the complex system which is necessary to parameterize and infer the underlying governing equations. We tested the approach with simulation experiments of moving particles and vector fields that interact with each other. While our current aim is to better understand and validate the approach with simulated data, we anticipate it to become a generally applicable tool to uncover the governing rules underlying complex dynamics observed in nature.
Read more7/30/2024
0
Learning Governing Equations of Unobserved States in Dynamical Systems
Gevik Grigorian, Sandip V. George, Simon Arridge
Data-driven modelling and scientific machine learning have been responsible for significant advances in determining suitable models to describe data. Within dynamical systems, neural ordinary differential equations (ODEs), where the system equations are set to be governed by a neural network, have become a popular tool for this challenge in recent years. However, less emphasis has been placed on systems that are only partially-observed. In this work, we employ a hybrid neural ODE structure, where the system equations are governed by a combination of a neural network and domain-specific knowledge, together with symbolic regression (SR), to learn governing equations of partially-observed dynamical systems. We test this approach on two case studies: A 3-dimensional model of the Lotka-Volterra system and a 5-dimensional model of the Lorenz system. We demonstrate that the method is capable of successfully learning the true underlying governing equations of unobserved states within these systems, with robustness to measurement noise.
Read more5/8/2024