Is Exploration All You Need? Effective Exploration Characteristics for Transfer in Reinforcement Learning

0

Sign in to get full access
Overview
- The paper investigates the characteristics of effective exploration in reinforcement learning (RL) and their impact on transfer learning.
- It explores whether exploration alone is sufficient for successful transfer learning or if other factors play a crucial role.
- The researchers conduct experiments to understand the exploration behaviors that lead to better transferability of learned skills across different tasks.
Plain English Explanation
The paper explores a fundamental question in reinforcement learning: Is exploration alone enough to enable effective transfer learning, or are there other important factors to consider?
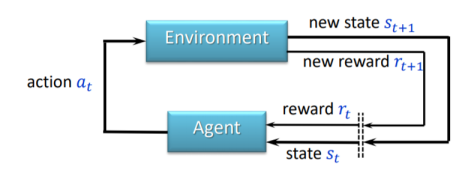
Reinforcement learning is a type of machine learning where an agent (like a robot or computer program) learns to make decisions by interacting with its environment and receiving feedback in the form of rewards or penalties. During this process, the agent has to balance exploring new actions to discover better ways of achieving its goals, while also exploiting its current knowledge to maximize rewards.
The researchers hypothesized that the characteristics of this exploration process might be a key determinant of how well the learned skills can transfer to new, related tasks. For example, an agent that explores its environment thoroughly and discovers a wide range of behaviors might be able to more easily adapt those behaviors to different situations, compared to an agent that focuses on exploiting a narrow set of actions.
To test this, the researchers designed experiments where they trained RL agents on various tasks and then evaluated how well the agents could transfer their learned skills to new, related tasks. By analyzing the exploration behaviors of the agents, the researchers aimed to identify the specific exploration characteristics that led to more successful transfer learning.
Technical Explanation
The paper begins by establishing the reinforcement learning framework and the challenge of balancing exploration and exploitation. The researchers then introduce the concept of transfer learning in RL, where an agent's knowledge and skills acquired in one task are leveraged to perform well on a different, but related, task.
The key focus of the research is to understand the role of exploration in enabling effective transfer learning. The authors hypothesize that the specific exploration characteristics of the agent, such as the breadth and diversity of behaviors discovered, may be more important for successful transfer than simply the amount of exploration performed.
To test this hypothesis, the researchers designed a series of experiments using several RL environments, including OpenAI Gym tasks and custom-designed environments. They trained RL agents using different exploration strategies, such as epsilon-greedy, count-based exploration, and curiosity-driven exploration. The agents were then evaluated on their ability to transfer learned skills to new, related tasks.
By analyzing the exploration behaviors and transfer learning performance of the agents, the researchers identified several key exploration characteristics that were associated with better transferability, including:
- Broad and diverse exploration, leading to the discovery of a wide range of behaviors
- Consistent and persistent exploration throughout the training process
- Exploration that is sensitive to task structure and rewards
The paper discusses these findings in detail and provides insights into how exploration can be better designed and guided to support effective transfer learning in reinforcement learning systems.
Critical Analysis
The paper presents a well-designed set of experiments that provide valuable insights into the role of exploration in enabling successful transfer learning in reinforcement learning. The researchers have made a compelling case for the importance of considering exploration characteristics beyond just the amount of exploration performed.
One potential limitation of the study is the use of relatively simple RL environments, which may not fully capture the complexity of real-world problems. The researchers acknowledge this and suggest that further investigation is needed to understand the generalizability of their findings to more challenging domains.
Additionally, the paper does not delve into the theoretical underpinnings of the observed relationships between exploration characteristics and transfer learning performance. A more in-depth analysis of the underlying mechanisms and principles could strengthen the explanatory power of the research.
Further research could also explore the interplay between exploration and other factors, such as the agent's architecture, learning algorithms, and task representations, to gain a more comprehensive understanding of the factors that enable effective transfer learning in reinforcement learning systems.
Conclusion
This paper makes a valuable contribution to the field of reinforcement learning by highlighting the importance of considering the characteristics of the exploration process, not just the amount of exploration, when designing systems for effective transfer learning.
The findings suggest that agents that engage in broad, diverse, and persistent exploration are more likely to discover a wide range of behaviors that can be successfully transferred to new, related tasks. This insight has important implications for the design of RL agents and algorithms that are intended to be versatile and adaptable, capable of leveraging their experience to perform well in diverse environments.
By further exploring the nuances of the exploration-transfer relationship, future research in this area can help unlock the full potential of reinforcement learning systems, enabling them to achieve robust and flexible problem-solving capabilities that can be applied across a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Is Exploration All You Need? Effective Exploration Characteristics for Transfer in Reinforcement Learning
Jonathan C. Balloch, Rishav Bhagat, Geigh Zollicoffer, Ruoran Jia, Julia Kim, Mark O. Riedl
In deep reinforcement learning (RL) research, there has been a concerted effort to design more efficient and productive exploration methods while solving sparse-reward problems. These exploration methods often share common principles (e.g., improving diversity) and implementation details (e.g., intrinsic reward). Prior work found that non-stationary Markov decision processes (MDPs) require exploration to efficiently adapt to changes in the environment with online transfer learning. However, the relationship between specific exploration characteristics and effective transfer learning in deep RL has not been characterized. In this work, we seek to understand the relationships between salient exploration characteristics and improved performance and efficiency in transfer learning. We test eleven popular exploration algorithms on a variety of transfer types -- or ``novelties'' -- to identify the characteristics that positively affect online transfer learning. Our analysis shows that some characteristics correlate with improved performance and efficiency across a wide range of transfer tasks, while others only improve transfer performance with respect to specific environment changes. From our analysis, make recommendations about which exploration algorithm characteristics are best suited to specific transfer situations.
Read more4/4/2024
0
Exploration in Knowledge Transfer Utilizing Reinforcement Learning
Adam Jedliv{c}ka, Tatiana Valentine Guy
The contribution focuses on the problem of exploration within the task of knowledge transfer. Knowledge transfer refers to the useful application of the knowledge gained while learning the source task in the target task. The intended benefit of knowledge transfer is to speed up the learning process of the target task. The article aims to compare several exploration methods used within a deep transfer learning algorithm, particularly Deep Target Transfer $Q$-learning. The methods used are $epsilon$-greedy, Boltzmann, and upper confidence bound exploration. The aforementioned transfer learning algorithms and exploration methods were tested on the virtual drone problem. The results have shown that the upper confidence bound algorithm performs the best out of these options. Its sustainability to other applications is to be checked.
Read more7/16/2024

0
Random Latent Exploration for Deep Reinforcement Learning
Srinath Mahankali, Zhang-Wei Hong, Ayush Sekhari, Alexander Rakhlin, Pulkit Agrawal
The ability to efficiently explore high-dimensional state spaces is essential for the practical success of deep Reinforcement Learning (RL). This paper introduces a new exploration technique called Random Latent Exploration (RLE), that combines the strengths of bonus-based and noise-based (two popular approaches for effective exploration in deep RL) exploration strategies. RLE leverages the idea of perturbing rewards by adding structured random rewards to the original task rewards in certain (random) states of the environment, to encourage the agent to explore the environment during training. RLE is straightforward to implement and performs well in practice. To demonstrate the practical effectiveness of RLE, we evaluate it on the challenging Atari and IsaacGym benchmarks and show that RLE exhibits higher overall scores across all the tasks than other approaches.
Read more7/19/2024
🔄
0
Robust Knowledge Transfer in Tiered Reinforcement Learning
Jiawei Huang, Niao He
In this paper, we study the Tiered Reinforcement Learning setting, a parallel transfer learning framework, where the goal is to transfer knowledge from the low-tier (source) task to the high-tier (target) task to reduce the exploration risk of the latter while solving the two tasks in parallel. Unlike previous work, we do not assume the low-tier and high-tier tasks share the same dynamics or reward functions, and focus on robust knowledge transfer without prior knowledge on the task similarity. We identify a natural and necessary condition called the ``Optimal Value Dominance'' for our objective. Under this condition, we propose novel online learning algorithms such that, for the high-tier task, it can achieve constant regret on partial states depending on the task similarity and retain near-optimal regret when the two tasks are dissimilar, while for the low-tier task, it can keep near-optimal without making sacrifice. Moreover, we further study the setting with multiple low-tier tasks, and propose a novel transfer source selection mechanism, which can ensemble the information from all low-tier tasks and allow provable benefits on a much larger state-action space.
Read more6/14/2024