ITA-ECBS: A Bounded-Suboptimal Algorithm for Combined Target-Assignment and Path-Finding Problem

0
Sign in to get full access
Overview
- The paper presents a bounded-suboptimal algorithm called ITA-ECBS (Iterative Target Assignment - Enhanced Conflict-Based Search) for solving the combined target-assignment and path-finding problem in multi-agent systems.
- The algorithm aims to efficiently assign agents to targets and plan their paths to reach the assigned targets, while providing performance guarantees.
- The proposed approach builds upon the Conflict-Based Search (CBS) algorithm, which is a popular technique for multi-agent path-finding, and extends it to handle the target assignment aspect.
Plain English Explanation
The paper tackles a challenging problem in the field of multi-agent systems, where a group of agents (e.g., robots or drones) need to be assigned to a set of targets (e.g., locations, objectives) and then navigate to their assigned targets. This is a common scenario in various applications, such as search-and-rescue operations, warehouse management, or military missions.
The key idea behind the ITA-ECBS algorithm is to combine the target assignment and path-finding tasks into a unified optimization problem. This means that the algorithm not only decides which agent should be assigned to which target, but also plans the most efficient paths for the agents to reach their assigned targets.
The algorithm builds upon a well-known technique called Conflict-Based Search (CBS), which is often used for coordinating the movements of multiple agents to avoid collisions. The researchers have extended the CBS algorithm to handle the target assignment aspect, allowing it to find a near-optimal solution that balances the assignment of agents to targets and the efficiency of the paths they take.
The main advantage of the ITA-ECBS algorithm is that it provides a bounded-suboptimal solution, meaning that the quality of the solution is guaranteed to be within a certain percentage of the optimal solution. This is important in many real-world applications, where finding the absolute best solution may not be necessary, but it is crucial to have a guarantee on the solution quality.
By combining the target assignment and path-finding tasks, the ITA-ECBS algorithm can find solutions that are more efficient and effective than handling these two problems separately. This can lead to significant improvements in the performance of multi-agent systems, such as faster task completion, reduced resource consumption, and better coordination between the agents.
Technical Explanation
The ITA-ECBS algorithm is a novel approach that extends the Conflict-Based Search (CBS) algorithm to handle the combined target-assignment and path-finding problem. CBS is a popular technique for multi-agent path-finding, where agents need to navigate to their assigned goals while avoiding collisions with each other.
The key innovation of ITA-ECBS is to integrate the target assignment and path-finding tasks into a unified optimization framework. This is achieved by introducing a new cost function that considers both the cost of assigning agents to targets and the cost of the paths the agents need to take to reach their assigned targets.
The algorithm works in an iterative fashion, where it first assigns agents to targets using a greedy approach, and then plans the paths for the agents to reach their assigned targets using the CBS algorithm. If the solution is not satisfactory, the algorithm refines the target assignments and path plans in subsequent iterations, guided by the combined cost function.
To provide performance guarantees, the researchers have introduced a bounded-suboptimal variant of the ITA-ECBS algorithm. This means that the algorithm can find a solution that is guaranteed to be within a certain percentage of the optimal solution, which is particularly important in time-sensitive or resource-constrained applications.
The algorithm's performance is evaluated through extensive simulations, where it is compared to other state-of-the-art approaches for combined target assignment and path-finding. The results demonstrate that ITA-ECBS can outperform these existing methods in terms of solution quality and computational efficiency, making it a promising approach for real-world multi-agent systems.
Critical Analysis
The ITA-ECBS algorithm presents a significant contribution to the field of multi-agent systems by addressing the combined target-assignment and path-finding problem in a unified and efficient manner. However, the paper does acknowledge several limitations and areas for further research:
-
Scalability: While the algorithm is shown to perform well in the tested scenarios, the authors note that the computational complexity may become a concern as the number of agents and targets increases. Exploring techniques to improve the scalability of the algorithm would be an important area for future research.
-
Heterogeneous Agents: The current formulation assumes that all agents are homogeneous and have the same capabilities. Extending the algorithm to handle heterogeneous agents with varying capabilities or constraints would broaden its applicability to real-world scenarios.
-
Dynamic Environments: The paper focuses on static environments, where the locations of agents and targets are known in advance. Adapting the algorithm to handle dynamic environments, where targets or obstacles may move or appear during the mission, would be a valuable extension.
-
Uncertainty Handling: The algorithm assumes perfect information about the environment and the agents' capabilities. Incorporating uncertainty, such as incomplete or noisy sensor data, could make the algorithm more robust and suitable for real-world applications.
-
Practical Considerations: While the simulations demonstrate the algorithm's performance, further research is needed to address practical implementation challenges, such as communication limitations, sensor noise, and hardware constraints in real-world robotic systems.
Overall, the ITA-ECBS algorithm represents a significant step forward in addressing the combined target-assignment and path-finding problem in multi-agent systems. The authors have provided a well-designed and evaluated solution that offers performance guarantees, making it a promising approach for various applications. Addressing the identified limitations and exploring the extensions mentioned could further enhance the algorithm's capabilities and broaden its practical applicability.
Conclusion
The ITA-ECBS algorithm presented in this paper offers a novel and efficient solution to the combined target-assignment and path-finding problem in multi-agent systems. By integrating these two tasks into a unified optimization framework and building upon the Conflict-Based Search algorithm, the researchers have developed a bounded-suboptimal approach that can find near-optimal solutions while providing performance guarantees.
The key strengths of the ITA-ECBS algorithm include its ability to balance the assignment of agents to targets and the efficiency of the planned paths, as well as its computational efficiency and scalability. These features make the algorithm a promising candidate for real-world applications, such as search-and-rescue operations, warehouse management, and military missions, where coordinating the movements of multiple agents to reach their assigned objectives is a critical challenge.
While the paper identifies several limitations and areas for future research, the ITA-ECBS algorithm represents a significant advancement in the field of multi-agent systems and provides a solid foundation for further developments. As researchers continue to explore ways to enhance the algorithm's capabilities and address practical implementation challenges, the potential impact of this work on the broader field of multi-agent coordination and task allocation will likely continue to grow.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ITA-ECBS: A Bounded-Suboptimal Algorithm for Combined Target-Assignment and Path-Finding Problem
Yimin Tang, Sven Koenig, Jiaoyang Li
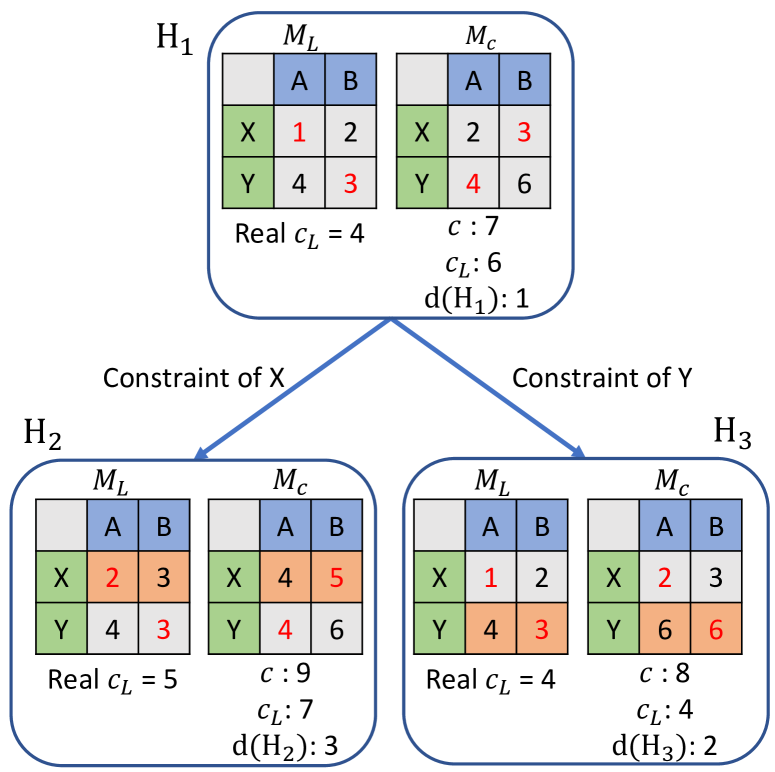
Multi-Agent Path Finding (MAPF), i.e., finding collision-free paths for multiple robots, plays a critical role in many applications. Sometimes, assigning a target to each agent also presents a challenge. The Combined Target-Assignment and Path-Finding (TAPF) problem, a variant of MAPF, requires one to simultaneously assign targets to agents and plan collision-free paths for agents. Several algorithms, including CBM, CBS-TA, and ITA-CBS, optimally solve the TAPF problem, with ITA-CBS being the leading algorithm for minimizing flowtime. However, the only existing bounded-suboptimal algorithm ECBS-TA is derived from CBS-TA rather than ITA-CBS. So, it faces the same issues as CBS-TA, such as searching through multiple constraint trees and spending too much time on finding the next-best target assignment. We introduce ITA-ECBS, the first bounded-suboptimal variant of ITA-CBS. Transforming ITA-CBS to its bounded-suboptimal variant is challenging because different constraint tree nodes can have different assignments of targets to agents. ITA-ECBS uses focal search to achieve efficiency and determines target assignments based on a new lower bound matrix. We show that it runs faster than ECBS-TA in 87.42% of 54,033 test cases.
Read more4/23/2024

0
Optimal Task Assignment and Path Planning using Conflict-Based Search with Precedence and Temporal Constraints
Yu Quan Chong, Jiaoyang Li, Katia Sycara
The Multi-Agent Path Finding (MAPF) problem entails finding collision-free paths for a set of agents, guiding them from their start to goal locations. However, MAPF does not account for several practical task-related constraints. For example, agents may need to perform actions at goal locations with specific execution times, adhering to predetermined orders and timeframes. Moreover, goal assignments may not be predefined for agents, and the optimization objective may lack an explicit definition. To incorporate task assignment, path planning, and a user-defined objective into a coherent framework, this paper examines the Task Assignment and Path Finding with Precedence and Temporal Constraints (TAPF-PTC) problem. We augment Conflict-Based Search (CBS) to simultaneously generate task assignments and collision-free paths that adhere to precedence and temporal constraints, maximizing an objective quantified by the return from a user-defined reward function in reinforcement learning (RL). Experimentally, we demonstrate that our algorithm, CBS-TA-PTC, can solve highly challenging bomb-defusing tasks with precedence and temporal constraints efficiently relative to MARL and adapted Target Assignment and Path Finding (TAPF) methods.
Read more4/23/2024

0
Unconstraining Multi-Robot Manipulation: Enabling Arbitrary Constraints in ECBS with Bounded Sub-Optimality
Yorai Shaoul, Rishi Veerapaneni, Maxim Likhachev, Jiaoyang Li
Multi-Robot-Arm Motion Planning (M-RAMP) is a challenging problem featuring complex single-agent planning and multi-agent coordination. Recent advancements in extending the popular Conflict-Based Search (CBS) algorithm have made large strides in solving Multi-Agent Path Finding (MAPF) problems. However, fundamental challenges remain in applying CBS to M-RAMP. A core challenge is the existing reliance of the CBS framework on conservative complete constraints. These constraints ensure solution guarantees but often result in slow pruning of the search space -- causing repeated expensive single-agent planning calls. Therefore, even though it is possible to leverage domain knowledge and design incomplete M-RAMP-specific CBS constraints to more efficiently prune the search, using these constraints would render the algorithm itself incomplete. This forces practitioners to choose between efficiency and completeness. In light of these challenges, we propose a novel algorithm, Generalized ECBS, aimed at removing the burden of choice between completeness and efficiency in MAPF algorithms. Our approach enables the use of arbitrary constraints in conflict-based algorithms while preserving completeness and bounding sub-optimality. This enables practitioners to capitalize on the benefits of arbitrary constraints and opens a new space for constraint design in MAPF that has not been explored. We provide a theoretical analysis of our algorithms, propose new incomplete constraints, and demonstrate their effectiveness through experiments in M-RAMP.
Read more7/30/2024
❗
0
Optimal and Bounded Suboptimal Any-Angle Multi-agent Pathfinding
Konstantin Yakovlev, Anton Andreychuk, Roni Stern
Multi-agent pathfinding (MAPF) is the problem of finding a set of conflict-free paths for a set of agents. Typically, the agents' moves are limited to a pre-defined graph of possible locations and allowed transitions between them, e.g. a 4-neighborhood grid. We explore how to solve MAPF problems when each agent can move between any pair of possible locations as long as traversing the line segment connecting them does not lead to a collision with the obstacles. This is known as any-angle pathfinding. We present the first optimal any-angle multi-agent pathfinding algorithm. Our planner is based on the Continuous Conflict-based Search (CCBS) algorithm and an optimal any-angle variant of the Safe Interval Path Planning (TO-AA-SIPP). The straightforward combination of those, however, scales poorly since any-angle path finding induces search trees with a very large branching factor. To mitigate this, we adapt two techniques from classical MAPF to the any-angle setting, namely Disjoint Splitting and Multi-Constraints. Experimental results on different combinations of these techniques show they enable solving over 30% more problems than the vanilla combination of CCBS and TO-AA-SIPP. In addition, we present a bounded-suboptimal variant of our algorithm, that enables trading runtime for solution cost in a controlled manner.
Read more9/2/2024