Iterative Learning Control of Fast, Nonlinear, Oscillatory Dynamics (Preprint)
2405.20045
0
0

Abstract
The sudden onset of deleterious and oscillatory dynamics (often called instabilities) is a known challenge in many fluid, plasma, and aerospace systems. These dynamics are difficult to address because they are nonlinear, chaotic, and are often too fast for active control schemes. In this work, we develop an alternative active controls system using an iterative, trajectory-optimization and parameter-tuning approach based on Iterative Learning Control (ILC), Time-Lagged Phase Portraits (TLPP) and Gaussian Process Regression (GPR). The novelty of this approach is that it can control a system's dynamics despite the controller being much slower than the dynamics. We demonstrate this controller on the Lorenz system of equations where it iteratively adjusts (tunes) the system's input parameters to successfully reproduce a desired oscillatory trajectory or state. Additionally, we investigate the system's dynamical sensitivity to its control parameters, identify continuous and bounded regions of desired dynamical trajectories, and demonstrate that the controller is robust to missing information and uncontrollable parameters as long as certain requirements are met. The controller presented in this work provides a framework for low-speed control for a variety of fast, nonlinear systems that may aid in instability suppression and mitigation.
Create account to get full access
Overview
- This paper presents a novel iterative learning control (ILC) approach for fast, nonlinear, and oscillatory dynamic systems.
- The method uses a time-lagged phase portrait representation and Gaussian process regression to capture the system's complex dynamics.
- The Earth Mover's Distance metric is employed to optimize the ILC parameters, addressing challenges like aerospace instabilities, chaos, and parameter tuning.
- The proposed approach is demonstrated on the Lorenz system, a classic example of a fast, nonlinear, and chaotic system.
Plain English Explanation
The research paper introduces a new control technique called iterative learning control (ILC) that can effectively manage fast, nonlinear, and oscillatory dynamic systems. These types of systems are often found in aerospace applications and can exhibit complex behaviors like instabilities and chaos.
The key innovation in this work is the use of a time-lagged phase portrait representation to capture the system's dynamics. This allows the researchers to model the system's behavior more accurately, even when it is rapidly changing and difficult to predict. They then use a statistical modeling technique called Gaussian process regression to learn the system's behavior from data.
To optimize the control parameters, the researchers employ a metric called the Earth Mover's Distance. This helps them find the best set of parameters to achieve the desired system performance, even in the face of the system's nonlinear and chaotic nature.
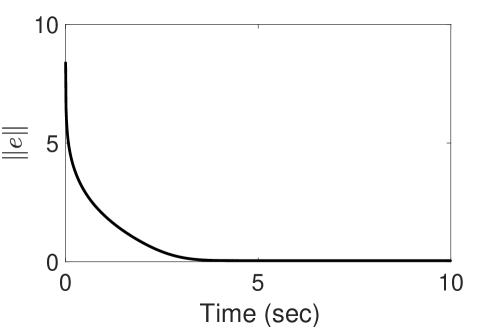
The researchers demonstrate their approach on the famous Lorenz system, which is a classic example of a fast, nonlinear, and chaotic dynamic system. The results show that the proposed ILC method can effectively control and stabilize the Lorenz system, even in the presence of its complex and unpredictable behavior.
Technical Explanation
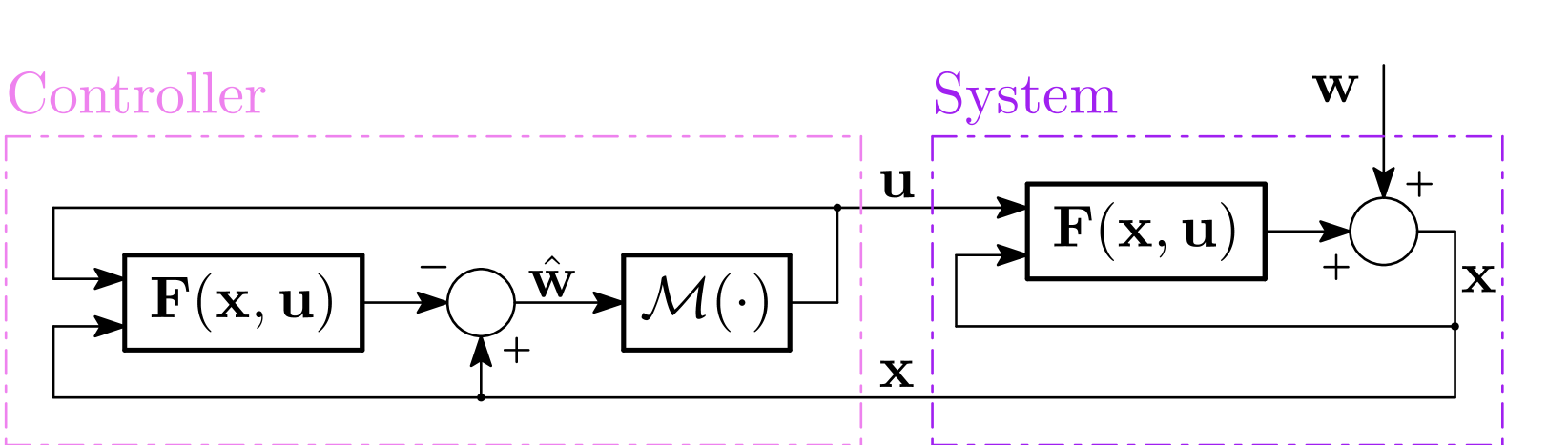
The paper presents an Iterative Learning Control (ILC) approach for fast, nonlinear, and oscillatory dynamic systems. The key innovations are the use of a time-lagged phase portrait representation to capture the system's complex dynamics and the application of Gaussian Process Regression (GPR) to model the system's behavior.
The researchers employ the Earth Mover's Distance (EMD) metric to optimize the ILC parameters, which helps address challenges like aerospace instabilities, chaos, and parameter tuning.
The proposed approach is demonstrated on the Lorenz system, a classic example of a fast, nonlinear, and chaotic dynamic system. The Lorenz system exhibits complex behaviors that are representative of many real-world aerospace and engineering applications.
Critical Analysis
The paper presents a promising approach for controlling fast, nonlinear, and oscillatory dynamic systems, which are notoriously difficult to manage. The use of time-lagged phase portraits and Gaussian process regression appears to be a effective way to capture the system's complex behavior, and the Earth Mover's Distance optimization technique helps find the best control parameters.
One potential limitation of the approach is that it may require a significant amount of data to accurately model the system's dynamics using Gaussian processes. In some applications, collecting sufficient data may be challenging or impractical. Additionally, the computational complexity of the Gaussian process regression and Earth Mover's Distance optimization may limit the real-time applicability of the method, especially for systems with very fast dynamics.
Further research could explore ways to reduce the data requirements or computational burden of the proposed approach, perhaps by incorporating additional domain-specific knowledge or leveraging other machine learning techniques. Validating the method on a broader range of nonlinear, oscillatory systems beyond the Lorenz example would also help establish its general applicability and robustness.
Conclusion
This paper presents a novel iterative learning control approach that demonstrates promising results for managing fast, nonlinear, and oscillatory dynamic systems. The key innovations include the use of time-lagged phase portraits and Gaussian process regression to model the system's complex behavior, along with the Earth Mover's Distance optimization technique to tune the control parameters.
The successful application of this method to the Lorenz system, a classic example of a fast, nonlinear, and chaotic system, suggests that it could be a valuable tool for addressing challenging control problems in aerospace, robotics, and other engineering domains. Further research to address potential limitations and expand the method's applicability could lead to significant advancements in the field of nonlinear control.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Learning to Boost the Performance of Stable Nonlinear Systems
Luca Furieri, Clara Luc'ia Galimberti, Giancarlo Ferrari-Trecate
0
0
The growing scale and complexity of safety-critical control systems underscore the need to evolve current control architectures aiming for the unparalleled performances achievable through state-of-the-art optimization and machine learning algorithms. However, maintaining closed-loop stability while boosting the performance of nonlinear control systems using data-driven and deep-learning approaches stands as an important unsolved challenge. In this paper, we tackle the performance-boosting problem with closed-loop stability guarantees. Specifically, we establish a synergy between the Internal Model Control (IMC) principle for nonlinear systems and state-of-the-art unconstrained optimization approaches for learning stable dynamics. Our methods enable learning over arbitrarily deep neural network classes of performance-boosting controllers for stable nonlinear systems; crucially, we guarantee Lp closed-loop stability even if optimization is halted prematurely, and even when the ground-truth dynamics are unknown, with vanishing conservatism in the class of stabilizing policies as the model uncertainty is reduced to zero. We discuss the implementation details of the proposed control schemes, including distributed ones, along with the corresponding optimization procedures, demonstrating the potential of freely shaping the cost functions through several numerical experiments.
5/3/2024

Improving Disturbance Estimation and Suppression via Learning among Systems with Mismatched Dynamics
Harsh Modi, Zhu Chen, Xiao Liang, Minghui Zheng
0
0
Iterative learning control (ILC) is a method for reducing system tracking or estimation errors over multiple iterations by using information from past iterations. The disturbance observer (DOB) is used to estimate and mitigate disturbances within the system, while the system is being affected by them. ILC enhances system performance by introducing a feedforward signal in each iteration. However, its effectiveness may diminish if the conditions change during the iterations. On the other hand, although DOB effectively mitigates the effects of new disturbances, it cannot entirely eliminate them as it operates reactively. Therefore, neither ILC nor DOB alone can ensure sufficient robustness in challenging scenarios. This study focuses on the simultaneous utilization of ILC and DOB to enhance system robustness. The proposed methodology specifically targets dynamically different linearized systems performing repetitive tasks. The systems share similar forms but differ in dynamics (e.g. sizes, masses, and controllers). Consequently, the design of learning filters must account for these differences in dynamics. To validate the approach, the study establishes a theoretical framework for designing learning filters in conjunction with DOB. The validity of the framework is then confirmed through numerical studies and experimental tests conducted on unmanned aerial vehicles (UAVs). Although UAVs are nonlinear systems, the study employs a linearized controller as they operate in proximity to the hover condition. A video introduction of this paper is available via this link: https://zh.engr.tamu.edu/wp-content/uploads/sites/310/2024/02/ILCDOB_v3f.mp4.
4/17/2024
Adaptive Actor-Critic Based Optimal Regulation for Drift-Free Uncertain Nonlinear Systems
Ashwin P. Dani, Shubhendu Bhasin
0
0
In this paper, a continuous-time adaptive actor-critic reinforcement learning (RL) controller is developed for drift-free nonlinear systems. Practical examples of such systems are image-based visual servoing (IBVS) and wheeled mobile robots (WMR), where the system dynamics includes a parametric uncertainty in the control effectiveness matrix with no drift term. The uncertainty in the input term poses a challenge for developing a continuous-time RL controller using existing methods. In this paper, an actor-critic or synchronous policy iteration (PI)-based RL controller is presented with a concurrent learning (CL)-based parameter update law for estimating the unknown parameters of the control effectiveness matrix. An infinite-horizon value function minimization objective is achieved by regulating the current states to the desired with near-optimal control efforts. The proposed controller guarantees closed-loop stability and simulation results validate the proposed theory using IBVS and WMR examples.
6/14/2024

PID Tuning using Cross-Entropy Deep Learning: a Lyapunov Stability Analysis
Hector Kohler, Benoit Clement, Thomas Chaffre, Gilles Le Chenadec
0
0
Underwater Unmanned Vehicles (UUVs) have to constantly compensate for the external disturbing forces acting on their body. Adaptive Control theory is commonly used there to grant the control law some flexibility in its response to process variation. Today, learning-based (LB) adaptive methods are leading the field where model-based control structures are combined with deep model-free learning algorithms. This work proposes experiments and metrics to empirically study the stability of such a controller. We perform this stability analysis on a LB adaptive control system whose adaptive parameters are determined using a Cross-Entropy Deep Learning method.
4/19/2024