Learning to Boost the Performance of Stable Nonlinear Systems
2405.00871
0
0
Abstract
The growing scale and complexity of safety-critical control systems underscore the need to evolve current control architectures aiming for the unparalleled performances achievable through state-of-the-art optimization and machine learning algorithms. However, maintaining closed-loop stability while boosting the performance of nonlinear control systems using data-driven and deep-learning approaches stands as an important unsolved challenge. In this paper, we tackle the performance-boosting problem with closed-loop stability guarantees. Specifically, we establish a synergy between the Internal Model Control (IMC) principle for nonlinear systems and state-of-the-art unconstrained optimization approaches for learning stable dynamics. Our methods enable learning over arbitrarily deep neural network classes of performance-boosting controllers for stable nonlinear systems; crucially, we guarantee Lp closed-loop stability even if optimization is halted prematurely, and even when the ground-truth dynamics are unknown, with vanishing conservatism in the class of stabilizing policies as the model uncertainty is reduced to zero. We discuss the implementation details of the proposed control schemes, including distributed ones, along with the corresponding optimization procedures, demonstrating the potential of freely shaping the cost functions through several numerical experiments.
Create account to get full access
Overview
- This paper explores techniques for improving the performance of stable nonlinear systems, which are common in many real-world applications like robotics, aerospace, and energy systems.
- The key ideas include using learning-based approaches to boost the performance of existing control systems, leveraging internal model control to handle system uncertainties, and developing distributed control architectures for scalability.
- The paper presents theoretical guarantees for the stability and performance of the proposed methods, as well as experimental results demonstrating their effectiveness on challenging nonlinear control problems.
Plain English Explanation
Controlling complex, real-world systems like robot arms, aircraft, or power grids is a major challenge. These systems are often nonlinear, meaning their behavior is not a simple linear relationship between inputs and outputs. This makes them difficult to model and control using traditional techniques.
The researchers in this paper explored ways to improve the performance of existing control systems for these stable, nonlinear systems. One key idea is to use machine learning to "boost" the capabilities of the control system, allowing it to handle more complex scenarios and operate more efficiently.
They also looked at using an internal model control approach, which builds an internal representation of the system being controlled. This helps the controller adapt to uncertainties or changes in the system over time.
Additionally, the researchers investigated distributed control architectures, where different parts of the control system are handled by separate, interconnected components. This can make the overall system more scalable and robust to failures in individual components.
The paper provides theoretical guarantees that these learning-based and distributed control approaches will maintain the stability and safety of the nonlinear systems, even as their performance is improved. The researchers also demonstrate the effectiveness of their methods through experiments on several challenging control problems.
Technical Explanation
The paper presents a framework for learning-based optimal control with performance guarantees for stable, nonlinear systems. The key components include:
-
Learning-Enhanced Control: The researchers develop a learning-based approach that can "boost" the performance of an existing stabilizing controller by learning a corrective control policy from data. This allows the system to handle more complex tasks and disturbances while maintaining stability.
-
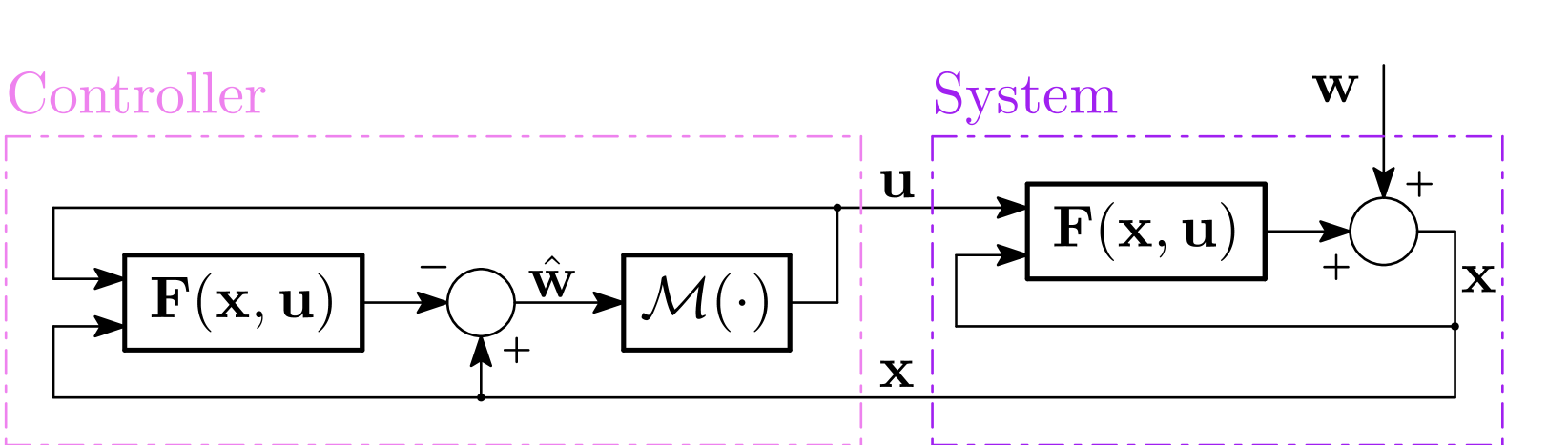
Internal Model Control: To address model uncertainties, the framework incorporates an internal model control architecture. This builds an internal representation of the system dynamics, enabling the controller to adapt to changes or discrepancies between the model and the real system.
-
Distributed Control: The authors propose a distributed control architecture where different subsystems are controlled by separate, interconnected components. This can improve the scalability and robustness of the overall control system.
The paper provides theoretical stability and performance guarantees for the proposed methods, even in the presence of model uncertainties. The researchers also demonstrate the effectiveness of their approaches through simulations and experiments on benchmark nonlinear control problems and a Koopman-based control example.
Critical Analysis
The paper presents a comprehensive framework for improving the performance of stable nonlinear systems while providing strong theoretical guarantees. Some potential areas for further research or discussion include:
-
Handling more severe model uncertainties: The internal model control approach assumes the system dynamics can be reasonably well-approximated. Exploring methods to handle larger model discrepancies could expand the applicability of the framework.
-
Scalability and computational efficiency: While the distributed control architecture aims to improve scalability, the computational complexity of the overall system could still be a concern, especially for real-time applications. Investigating ways to further optimize the algorithms could be beneficial.
-
Robustness to disturbances and failures: The paper focuses on stability and performance guarantees, but additional analysis on the resilience of the control system to external disturbances or component failures could provide valuable insights.
-
Practical implementation considerations: The theoretical guarantees and experimental results are promising, but transitioning these methods to real-world, large-scale systems may introduce additional challenges that could be worth exploring.
Overall, the paper presents a well-designed and rigorously analyzed framework for improving the control of stable nonlinear systems, with clear potential for practical impact in various domains.
Conclusion
This paper introduces a novel framework for enhancing the performance of stable nonlinear systems through the integration of learning-based control, internal model control, and distributed control architectures. The proposed methods provide strong theoretical guarantees for stability and performance, even in the presence of model uncertainties.
The key contributions of this work include:
- A learning-based approach that can boost the capabilities of existing stabilizing controllers, allowing the system to handle more complex tasks and disturbances.
- An internal model control structure that enables the controller to adapt to changes or discrepancies between the model and the real system.
- A distributed control architecture that can improve the scalability and robustness of the overall control system.
The experimental results demonstrate the effectiveness of these techniques on challenging nonlinear control problems, suggesting that the framework could have significant practical impact in fields such as robotics, aerospace, and energy systems. Further research to address potential limitations, such as handling more severe model uncertainties and improving computational efficiency, could further enhance the real-world applicability of this work.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Stability-informed Bayesian Optimization for MPC Cost Function Learning
Sebastian Hirt, Maik Pfefferkorn, Ali Mesbah, Rolf Findeisen
0
0
Designing predictive controllers towards optimal closed-loop performance while maintaining safety and stability is challenging. This work explores closed-loop learning for predictive control parameters under imperfect information while considering closed-loop stability. We employ constrained Bayesian optimization to learn a model predictive controller's (MPC) cost function parametrized as a feedforward neural network, optimizing closed-loop behavior as well as minimizing model-plant mismatch. Doing so offers a high degree of freedom and, thus, the opportunity for efficient and global optimization towards the desired and optimal closed-loop behavior. We extend this framework by stability constraints on the learned controller parameters, exploiting the optimal value function of the underlying MPC as a Lyapunov candidate. The effectiveness of the proposed approach is underlined in simulations, highlighting its performance and safety capabilities.
4/19/2024
🚀
Learning-Based Optimal Control with Performance Guarantees for Unknown Systems with Latent States
Robert Lefringhausen, Supitsana Srithasan, Armin Lederer, Sandra Hirche
0
0
As control engineering methods are applied to increasingly complex systems, data-driven approaches for system identification appear as a promising alternative to physics-based modeling. While the Bayesian approaches prevalent for safety-critical applications usually rely on the availability of state measurements, the states of a complex system are often not directly measurable. It may then be necessary to jointly estimate the dynamics and the latent state, making the quantification of uncertainties and the design of controllers with formal performance guarantees considerably more challenging. This paper proposes a novel method for the computation of an optimal input trajectory for unknown nonlinear systems with latent states based on a combination of particle Markov chain Monte Carlo methods and scenario theory. Probabilistic performance guarantees are derived for the resulting input trajectory, and an approach to validate the performance of arbitrary control laws is presented. The effectiveness of the proposed method is demonstrated in a numerical simulation.
4/17/2024

Providing Safety Assurances for Systems with Unknown Dynamics
Hao Wang, Javier Borquez, Somil Bansal
0
0
As autonomous systems become more complex and integral in our society, the need to accurately model and safely control these systems has increased significantly. In the past decade, there has been tremendous success in using deep learning techniques to model and control systems that are difficult to model using first principles. However, providing safety assurances for such systems remains difficult, partially due to the uncertainty in the learned model. In this work, we aim to provide safety assurances for systems whose dynamics are not readily derived from first principles and, hence, are more advantageous to be learned using deep learning techniques. Given the system of interest and safety constraints, we learn an ensemble model of the system dynamics from data. Leveraging ensemble uncertainty as a measure of uncertainty in the learned dynamics model, we compute a maximal robust control invariant set, starting from which the system is guaranteed to satisfy the safety constraints under the condition that realized model uncertainties are contained in the predefined set of admissible model uncertainty. We demonstrate the effectiveness of our method using a simulated case study with an inverted pendulum and a hardware experiment with a TurtleBot. The experiments show that our method robustifies the control actions of the system against model uncertainty and generates safe behaviors without being overly restrictive. The codes and accompanying videos can be found on the project website.
5/7/2024

Iterative Learning Control of Fast, Nonlinear, Oscillatory Dynamics (Preprint)
John W. Brooks, Christine M. Greve
0
0
The sudden onset of deleterious and oscillatory dynamics (often called instabilities) is a known challenge in many fluid, plasma, and aerospace systems. These dynamics are difficult to address because they are nonlinear, chaotic, and are often too fast for active control schemes. In this work, we develop an alternative active controls system using an iterative, trajectory-optimization and parameter-tuning approach based on Iterative Learning Control (ILC), Time-Lagged Phase Portraits (TLPP) and Gaussian Process Regression (GPR). The novelty of this approach is that it can control a system's dynamics despite the controller being much slower than the dynamics. We demonstrate this controller on the Lorenz system of equations where it iteratively adjusts (tunes) the system's input parameters to successfully reproduce a desired oscillatory trajectory or state. Additionally, we investigate the system's dynamical sensitivity to its control parameters, identify continuous and bounded regions of desired dynamical trajectories, and demonstrate that the controller is robust to missing information and uncontrollable parameters as long as certain requirements are met. The controller presented in this work provides a framework for low-speed control for a variety of fast, nonlinear systems that may aid in instability suppression and mitigation.
5/31/2024