Key-Scan-Based Mobile Robot Navigation: Integrated Mapping, Planning, and Control using Graphs of Scan Regions

0

Sign in to get full access
Overview
- This technical report describes a novel mobile robot navigation system that integrates mapping, planning, and control using a graph-based representation of the environment.
- The system uses "key-scans" - distinctive local sensor observations - to build a topological map and plan efficient paths through the environment.
- The integrated approach aims to enable robust, safe, and reliable autonomous navigation in complex, unstructured environments.
Plain English Explanation
The paper presents a new way for mobile robots to navigate through their surroundings. Instead of relying on detailed maps or complex sensor data, the system uses a more high-level, graph-based approach.
The key idea is to identify distinctive "key-scans" - unique sensor readings that the robot can recognize as it moves around. It uses these key-scans to build a topological map, which is like a simplified diagram of the environment showing the main areas and how they connect.
With this map, the robot can plan efficient paths to get where it needs to go. The integrated mapping, planning, and control system helps the robot move safely and reliably, even in cluttered or unpredictable environments. By focusing on the key features of the surroundings rather than trying to build a complete model, the system can operate robustly without getting bogged down in complex sensor data.
Technical Explanation
The paper introduces a Key-Scan-Based Mobile Robot Navigation system that tightly couples mapping, planning, and control using a graph-based representation of the environment.
The key components are:
-
Key-Scan Extraction: The robot uses its sensors to identify distinctive local observations, called "key-scans", that can be reliably recognized as the robot moves through the environment.
-
Topological Mapping: The robot builds a topological map by linking together the key-scans into a graph structure, where nodes represent key-scan locations and edges represent traversable paths.
-
Path Planning: With the topological map, the robot can efficiently plan paths between locations by searching the graph for the optimal sequence of key-scans to reach a goal.
-
Motion Control: The robot then executes the planned path, using the key-scans as waypoints to guide its low-level control and ensure safe, reliable navigation.
The integrated approach aims to enable robust autonomous navigation in complex, unstructured environments, avoiding the need for detailed metric maps or computationally-intensive sensor processing.
Critical Analysis
The authors note that the key-scan-based approach has some limitations compared to traditional metric mapping and planning methods. For example, the topological map may not capture all the nuances of the environment, and the robot's path planning is constrained to the pre-defined graph structure.
Additionally, the performance of the system likely depends on the reliability and distinctiveness of the key-scans, which could be challenged in highly dynamic or symmetrical environments.
Further research could explore ways to integrate the key-scan-based approach with other techniques, such as learning-based methods or sensor fusion, to create a more comprehensive and adaptable navigation system.
Conclusion
This technical report presents an innovative approach to mobile robot navigation that leverages a graph-based representation of the environment, enabling efficient and robust mapping, planning, and control. By focusing on distinctive sensor observations rather than detailed maps, the system aims to address the challenges of autonomous navigation in complex, unstructured settings.
While the key-scan-based approach has some limitations, the integrated nature of the system and its potential for reliable operation in diverse environments make it an intriguing contribution to the field of mobile robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Key-Scan-Based Mobile Robot Navigation: Integrated Mapping, Planning, and Control using Graphs of Scan Regions
Dharshan Bashkaran Latha, Omur Arslan
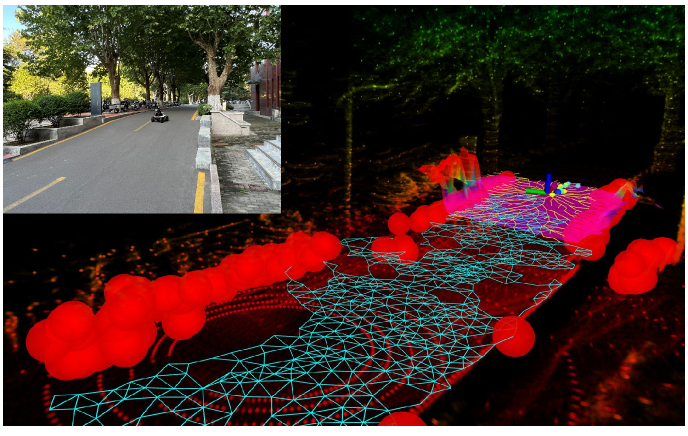
Safe autonomous navigation in a priori unknown environments is an essential skill for mobile robots to reliably and adaptively perform diverse tasks (e.g., delivery, inspection, and interaction) in unstructured cluttered environments. Hybrid metric-topological maps, constructed as a pose graph of local submaps, offer a computationally efficient world representation for adaptive mapping, planning, and control at the regional level. In this paper, we consider a pose graph of locally sensed star-convex scan regions as a metric-topological map, with star convexity enabling simple yet effective local navigation strategies. We design a new family of safe local scan navigation policies and present a perception-driven feedback motion planning method through the sequential composition of local scan navigation policies, enabling provably correct and safe robot navigation over the union of local scan regions. We introduce a new concept of bridging and frontier scans for automated key scan selection and exploration for integrated mapping and navigation in unknown environments. We demonstrate the effectiveness of our key-scan-based navigation and mapping framework using a mobile robot equipped with a 360$^{circ}$ laser range scanner in 2D cluttered environments through numerical ROS-Gazebo simulations and real hardware~experiments.
Read more9/24/2024

0
New!Topological mapping for traversability-aware long-range navigation in off-road terrain
Jean-Franc{c}ois Tremblay, Julie Alhosh, Louis Petit, Faraz Lotfi, Lara Landauro, David Meger
Autonomous robots navigating in off-road terrain like forests open new opportunities for automation. While off-road navigation has been studied, existing work often relies on clearly delineated pathways. We present a method allowing for long-range planning, exploration and low-level control in unknown off-trail forest terrain, using vision and GPS only. We represent outdoor terrain with a topological map, which is a set of panoramic snapshots connected with edges containing traversability information. A novel traversability analysis method is demonstrated, predicting the existence of a safe path towards a target in an image. Navigating between nodes is done using goal-conditioned behavior cloning, leveraging the power of a pretrained vision transformer. An exploration planner is presented, efficiently covering an unknown off-road area with unknown traversability using a frontiers-based approach. The approach is successfully deployed to autonomously explore two 400 meters squared forest sites unseen during training, in difficult conditions for navigation.
Read more10/4/2024
0
History-Aware Planning for Risk-free Autonomous Navigation on Unknown Uneven Terrain
Yinchuan Wang, Nianfei Du, Yongsen Qin, Xiang Zhang, Rui Song, Chaoqun Wang
It is challenging for the mobile robot to achieve autonomous and mapless navigation in the unknown environment with uneven terrain. In this study, we present a layered and systematic pipeline. At the local level, we maintain a tree structure that is dynamically extended with the navigation. This structure unifies the planning with the terrain identification. Besides, it contributes to explicitly identifying the hazardous areas on uneven terrain. In particular, certain nodes of the tree are consistently kept to form a sparse graph at the global level, which records the history of the exploration. A series of subgoals that can be obtained in the tree and the graph are utilized for leading the navigation. To determine a subgoal, we develop an evaluation method whose input elements can be efficiently obtained on the layered structure. We conduct both simulation and real-world experiments to evaluate the developed method and its key modules. The experimental results demonstrate the effectiveness and efficiency of our method. The robot can travel through the unknown uneven region safely and reach the target rapidly without a preconstructed map.
Read more6/5/2024

0
Sensor-Based Distributionally Robust Control for Safe Robot Navigation in Dynamic Environments
Kehan Long, Yinzhuang Yi, Zhirui Dai, Sylvia Herbert, Jorge Cort'es, Nikolay Atanasov
We introduce a novel method for safe mobile robot navigation in dynamic, unknown environments, utilizing onboard sensing to impose safety constraints without the need for accurate map reconstruction. Traditional methods typically rely on detailed map information to synthesize safe stabilizing controls for mobile robots, which can be computationally demanding and less effective, particularly in dynamic operational conditions. By leveraging recent advances in distributionally robust optimization, we develop a distributionally robust control barrier function (DR-CBF) constraint that directly processes range sensor data to impose safety constraints. Coupling this with a control Lyapunov function (CLF) for path tracking, we demonstrate that our CLF-DR-CBF control synthesis method achieves safe, efficient, and robust navigation in uncertain dynamic environments. We demonstrate the effectiveness of our approach in simulated and real autonomous robot navigation experiments, marking a substantial advancement in real-time safety guarantees for mobile robots.
Read more5/29/2024