KinScene: Model-Based Mobile Manipulation of Articulated Scenes

0
Sign in to get full access
Overview
- The paper presents KinScene, a model-based approach for mobile manipulation of articulated scenes.
- It focuses on enabling robots to understand and interact with complex, dynamic environments.
- The approach combines computer vision, motion planning, and control to allow robots to manipulate and rearrange objects in a scene.
Plain English Explanation
The paper describes a new system called KinScene that helps robots better understand and interact with complex, real-world environments. In many situations, robots need to be able to manipulate objects that are part of larger, articulated scenes - for example, opening a drawer, adjusting a door, or rearranging items on a table.
KinScene tackles this challenge by combining several key technologies:
- Computer vision: The system can visually perceive and model the 3D structure and motion of objects in a scene, including how they are connected and how they move.
- Motion planning: Based on this model, the robot can plan out sequences of actions to manipulate objects in the desired way, taking into account their constraints and relationships.
- Robot control: Finally, the robot can execute these planned motions to physically interact with and rearrange the objects in the real world.
By bringing these capabilities together, KinScene allows robots to perform much more sophisticated and flexible manipulations of their environments compared to previous approaches. This could enable robots to be more helpful in a wider range of real-world tasks, from household chores to industrial applications.
Technical Explanation
The core of the KinScene system is a model-based approach to representing and reasoning about articulated scenes. The system first builds a 3D kinematic model of the scene by using computer vision techniques to detect and track the different objects and how they are connected.
This kinematic model captures the degrees of freedom and constraints of the articulated objects, allowing the robot to reason about how it can manipulate them. The robot then uses motion planning algorithms to generate sequences of actions that achieve the desired rearrangement or interaction with the scene, while respecting the object constraints.
To validate the approach, the authors conducted experiments where a mobile manipulator robot had to perform tasks like opening a cabinet, adjusting a door, and rearranging objects on a table. The results showed that KinScene was able to successfully complete these tasks, demonstrating the ability to reason about and interact with complex, articulated environments.
Critical Analysis
The paper presents a compelling approach to enabling more sophisticated mobile manipulation capabilities for robots. By integrating computer vision, motion planning, and robot control, KinScene tackles an important challenge in robotics - how to allow robots to flexibly and reliably interact with real-world scenes.
One potential limitation mentioned is the need for the system to have accurate 3D models of the objects in the scene beforehand. In many real-world settings, this level of prior knowledge may not always be available. Extending the approach to handle more uncertainty or learn models on the fly could further enhance its practical applicability.
Additionally, the paper focuses on relatively simple, tabletop-scale scenes. Scaling the techniques to handle larger, more cluttered environments with many interconnected objects could require significant additional research and development.
Overall, though, KinScene represents an important step forward in equipping robots with the capabilities needed to seamlessly operate in complex, dynamic settings. As the field of robotics continues to advance, innovations like this will be critical for expanding the reach and utility of robotic systems.
Conclusion
The KinScene paper presents a novel approach for enabling robots to better understand and manipulate articulated scenes. By combining computer vision, motion planning, and robot control, the system allows robots to perceive the 3D structure and motion of objects, reason about how to interact with them, and then execute those interactions in the real world.
This work represents an important advancement in the field of mobile manipulation, which is crucial for expanding the scope of tasks that robots can perform in real-world environments. While the current system has some limitations, the core ideas and techniques demonstrated in KinScene lay the groundwork for future innovations that could lead to even more capable and versatile robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
KinScene: Model-Based Mobile Manipulation of Articulated Scenes
Cheng-Chun Hsu, Ben Abbatematteo, Zhenyu Jiang, Yuke Zhu, Roberto Mart'in-Mart'in, Joydeep Biswas
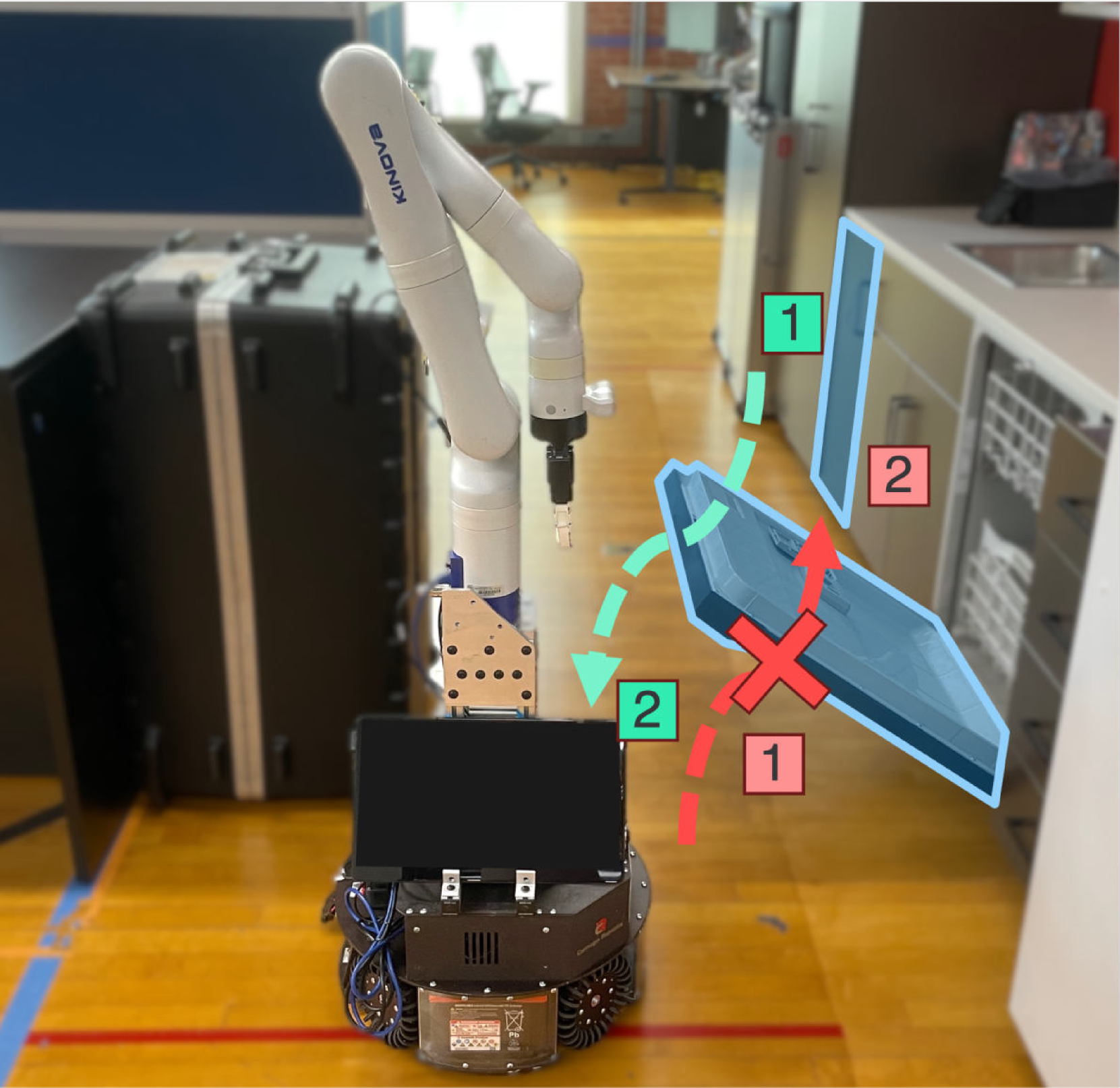
Sequentially interacting with articulated objects is crucial for a mobile manipulator to operate effectively in everyday environments. To enable long-horizon tasks involving articulated objects, this study explores building scene-level articulation models for indoor scenes through autonomous exploration. While previous research has studied mobile manipulation with articulated objects by considering object kinematic constraints, it primarily focuses on individual-object scenarios and lacks extension to a scene-level context for task-level planning. To manipulate multiple object parts sequentially, the robot needs to reason about the resultant motion of each part and anticipate its impact on future actions.We introduce ourtool{}, a full-stack approach for long-horizon manipulation tasks with articulated objects. The robot maps the scene, detects and physically interacts with articulated objects, collects observations, and infers the articulation properties. For sequential tasks, the robot plans a feasible series of object interactions based on the inferred articulation model. We demonstrate that our approach repeatably constructs accurate scene-level kinematic and geometric models, enabling long-horizon mobile manipulation in a real-world scene. Code and additional results are available at https://chengchunhsu.github.io/KinScene/
Read more9/26/2024
↗️
0
Language-Grounded Dynamic Scene Graphs for Interactive Object Search with Mobile Manipulation
Daniel Honerkamp, Martin Buchner, Fabien Despinoy, Tim Welschehold, Abhinav Valada
To fully leverage the capabilities of mobile manipulation robots, it is imperative that they are able to autonomously execute long-horizon tasks in large unexplored environments. While large language models (LLMs) have shown emergent reasoning skills on arbitrary tasks, existing work primarily concentrates on explored environments, typically focusing on either navigation or manipulation tasks in isolation. In this work, we propose MoMa-LLM, a novel approach that grounds language models within structured representations derived from open-vocabulary scene graphs, dynamically updated as the environment is explored. We tightly interleave these representations with an object-centric action space. Given object detections, the resulting approach is zero-shot, open-vocabulary, and readily extendable to a spectrum of mobile manipulation and household robotic tasks. We demonstrate the effectiveness of MoMa-LLM in a novel semantic interactive search task in large realistic indoor environments. In extensive experiments in both simulation and the real world, we show substantially improved search efficiency compared to conventional baselines and state-of-the-art approaches, as well as its applicability to more abstract tasks. We make the code publicly available at http://moma-llm.cs.uni-freiburg.de.
Read more8/1/2024

0
FlowBot++: Learning Generalized Articulated Objects Manipulation via Articulation Projection
Harry Zhang, Ben Eisner, David Held
Understanding and manipulating articulated objects, such as doors and drawers, is crucial for robots operating in human environments. We wish to develop a system that can learn to articulate novel objects with no prior interaction, after training on other articulated objects. Previous approaches for articulated object manipulation rely on either modular methods which are brittle or end-to-end methods, which lack generalizability. This paper presents FlowBot++, a deep 3D vision-based robotic system that predicts dense per-point motion and dense articulation parameters of articulated objects to assist in downstream manipulation tasks. FlowBot++ introduces a novel per-point representation of the articulated motion and articulation parameters that are combined to produce a more accurate estimate than either method on their own. Simulated experiments on the PartNet-Mobility dataset validate the performance of our system in articulating a wide range of objects, while real-world experiments on real objects' point clouds and a Sawyer robot demonstrate the generalizability and feasibility of our system in real-world scenarios.
Read more5/3/2024

0
Kinodynamic Motion Planning for Collaborative Object Transportation by Multiple Mobile Manipulators
Keshab Patra, Arpita Sinha, Anirban Guha
This work proposes a kinodynamic motion planning technique for collaborative object transportation by multiple mobile manipulators in dynamic environments. A global path planner computes a linear piecewise path from start to goal. A novel algorithm detects the narrow regions between the static obstacles and aids in defining the obstacle-free region to enhance the feasibility of the global path. We then formulate a local online motion planning technique for trajectory generation that minimizes the control efforts in a receding horizon manner. It plans the trajectory for finite time horizons, considering the kinodynamic constraints and the static and dynamic obstacles. The planning technique jointly plans for the mobile bases and the arms to utilize the locomotion capability of the mobile base and the manipulation capability of the arm efficiently. We use a convex cone approach to avoid self-collision of the formation by modifying the mobile manipulators admissible state without imposing additional constraints. Numerical simulations and hardware experiments showcase the efficiency of the proposed approach.
Read more9/24/2024