Kinodynamic Motion Planning for Collaborative Object Transportation by Multiple Mobile Manipulators

0

Sign in to get full access
Overview
- This paper presents a kinodynamic motion planning framework for collaborative object transportation by multiple mobile manipulators.
- The goal is to enable a team of mobile robots to work together to move an object from one location to another while satisfying constraints on the object's motion.
- The approach combines motion planning algorithms with coordination strategies to generate collision-free, dynamically-feasible trajectories for the robots.
Plain English Explanation
In this research, the authors developed a system to help a team of mobile robots work together to move an object from one place to another. The key challenge is ensuring the robots can coordinate their movements to transport the object safely and efficiently without collisions.
The researchers' solution combines motion planning algorithms with coordination strategies. Motion planning algorithms allow the robots to plan collision-free paths to reach their desired locations. The coordination strategies ensure the robots work together seamlessly to move the object without exceeding constraints on the object's motion, such as maximum speed or acceleration.
By integrating these components, the system can generate trajectories for the robots that satisfy all the relevant physical and operational constraints. This allows a team of mobile robots to collaboratively transport an object from one point to another in a safe and coordinated manner.
Technical Explanation
The paper presents a kinodynamic motion planning framework for the collaborative transportation of an object by multiple mobile manipulators. The key elements of the approach include:
-
Motion Planning: The researchers use a sampling-based motion planning algorithm to generate collision-free trajectories for each robot. This accounts for the robots' kinematic and dynamic constraints.
-
Coordination Strategies: To enable collaborative transport, the authors develop coordination strategies that orchestrate the robots' motions. This includes techniques for task allocation and trajectory synchronization.
-
Optimization: The motion planning and coordination components are combined into a unified optimization problem. This allows the system to find the best joint trajectories for the robots while satisfying constraints on the object's motion.
The researchers evaluate their approach through simulations and real-world experiments involving a team of mobile manipulators transporting an object. The results demonstrate the effectiveness of the proposed framework in generating collision-free, dynamically-feasible trajectories for collaborative object transportation.
Critical Analysis
The paper presents a comprehensive solution for the challenging problem of collaborative object transport by multiple mobile robots. The authors thoughtfully integrate motion planning and coordination strategies to enable the robots to work together seamlessly.
One potential limitation is the reliance on a centralized optimization approach, which may not scale well to larger teams of robots. Distributed or decentralized coordination strategies could be an area for further research to improve the system's scalability and robustness.
Additionally, the paper focuses primarily on simulation and controlled experimental settings. Evaluating the approach in more complex, real-world environments with dynamic obstacles and changing conditions could provide valuable insights and identify areas for improvement.
Conclusion
This research makes a significant contribution to the field of multi-robot systems by presenting a kinodynamic motion planning framework for collaborative object transportation. The integration of motion planning and coordination strategies enables a team of mobile manipulators to transport an object while satisfying various physical and operational constraints.
The findings from this work have the potential to enhance the capabilities of robotic systems in applications such as warehouse automation, construction, and disaster response, where the coordinated movement of objects is crucial. Further development and testing in more realistic scenarios could help unlock the full potential of this collaborative motion planning approach.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Kinodynamic Motion Planning for Collaborative Object Transportation by Multiple Mobile Manipulators
Keshab Patra, Arpita Sinha, Anirban Guha
This work proposes a kinodynamic motion planning technique for collaborative object transportation by multiple mobile manipulators in dynamic environments. A global path planner computes a linear piecewise path from start to goal. A novel algorithm detects the narrow regions between the static obstacles and aids in defining the obstacle-free region to enhance the feasibility of the global path. We then formulate a local online motion planning technique for trajectory generation that minimizes the control efforts in a receding horizon manner. It plans the trajectory for finite time horizons, considering the kinodynamic constraints and the static and dynamic obstacles. The planning technique jointly plans for the mobile bases and the arms to utilize the locomotion capability of the mobile base and the manipulation capability of the arm efficiently. We use a convex cone approach to avoid self-collision of the formation by modifying the mobile manipulators admissible state without imposing additional constraints. Numerical simulations and hardware experiments showcase the efficiency of the proposed approach.
Read more9/24/2024
0
New!Kinodynamic Motion Planning for a Team of Multirotors Transporting a Cable-Suspended Payload in Cluttered Environments
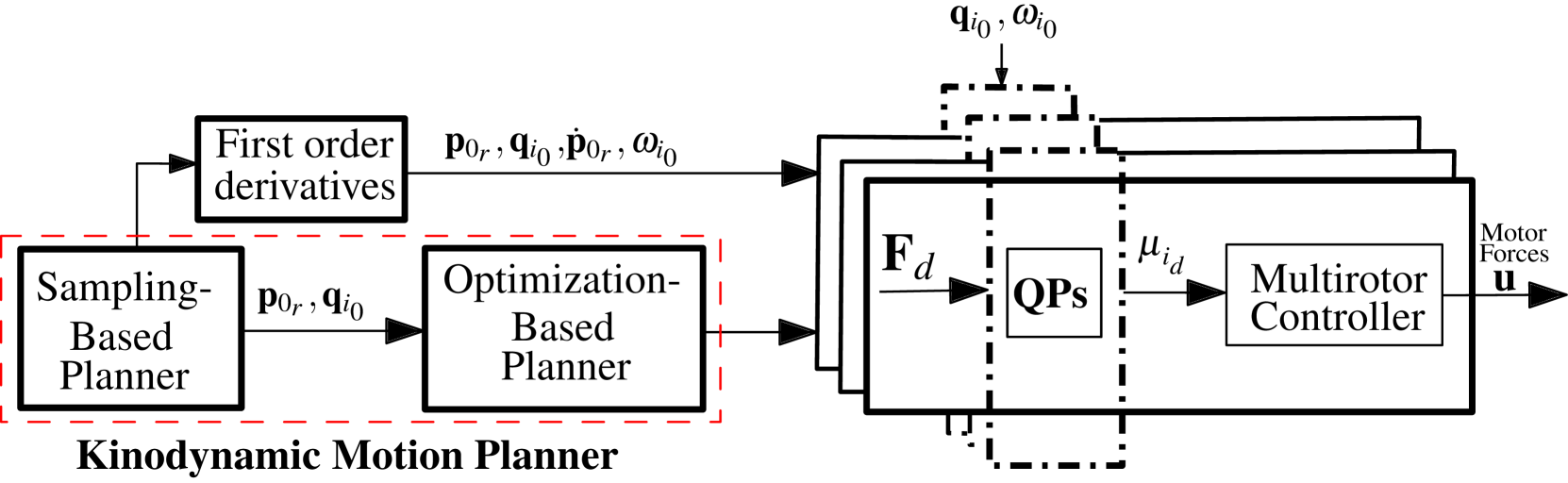
Khaled Wahba, Joaquim Ortiz-Haro, Marc Toussaint, Wolfgang Honig
We propose a motion planner for cable-driven payload transportation using multiple unmanned aerial vehicles (UAVs) in an environment cluttered with obstacles. Our planner is kinodynamic, i.e., it considers the full dynamics model of the transporting system including actuation constraints. Due to the high dimensionality of the planning problem, we use a hierarchical approach where we first solve the geometric motion planning using a sampling-based method with a novel sampler, followed by constrained trajectory optimization that considers the full dynamics of the system. Both planning stages consider inter-robot and robot/obstacle collisions. We demonstrate in a software-in-the-loop simulation and real flight experiments that there is a significant benefit in kinodynamic motion planning for such payload transport systems with respect to payload tracking error and energy consumption compared to the standard methods of planning for the payload alone. Notably, we observe a significantly higher success rate in scenarios where the team formation changes are needed to move through tight spaces.
Read more10/2/2024

0
New!Collaborative motion planning for multi-manipulator systems through Reinforcement Learning and Dynamic Movement Primitives
Siddharth Singh, Tian Xu, Qing Chang
Robotic tasks often require multiple manipulators to enhance task efficiency and speed, but this increases complexity in terms of collaboration, collision avoidance, and the expanded state-action space. To address these challenges, we propose a multi-level approach combining Reinforcement Learning (RL) and Dynamic Movement Primitives (DMP) to generate adaptive, real-time trajectories for new tasks in dynamic environments using a demonstration library. This method ensures collision-free trajectory generation and efficient collaborative motion planning. We validate the approach through experiments in the PyBullet simulation environment with UR5e robotic manipulators.
Read more10/2/2024

0
Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
Read more6/6/2024