L-PR: Exploiting LiDAR Fiducial Marker for Unordered Low Overlap Multiview Point Cloud Registration

0
Sign in to get full access
Overview
- This paper presents a novel approach called L-PR (LiDAR Fiducial Marker-based Point Cloud Registration) for registering unordered, low-overlap multiview point clouds.
- The key innovation is the use of fiducial markers that are detected in the LiDAR point cloud data to help align the different views.
- The method is designed to work effectively even when there is limited overlap between the scans, a common challenge in real-world 3D reconstruction scenarios.
Plain English Explanation
When you capture 3D data using a LiDAR sensor, you often end up with multiple scans from different viewpoints. L-PR: Exploiting LiDAR Fiducial Marker for Unordered Low Overlap Multiview Point Cloud Registration proposes a way to automatically stitch these scans together, even if there is limited overlap between them.
The key idea is to place special markers, called fiducial markers, in the environment. These markers are detected in the LiDAR point cloud data, and used as reference points to align the different scans. This helps overcome the challenge of having low overlap between the scans, which can make it difficult to match up the features and register the data.
By leveraging these fiducial markers, the L-PR method can accurately combine the multiple scans into a single, unified 3D model, even in situations where traditional registration techniques would struggle. This could be useful for applications like 3D mapping, robotics, and virtual/augmented reality, where having a complete 3D representation of an environment is important.
Technical Explanation
The L-PR approach consists of several key components:
-
Fiducial Marker Detection: The method first detects the fiducial markers present in the LiDAR point cloud data. This is done using a deep learning-based point cloud registration technique.
-
Marker-based Coarse Registration: Once the fiducial markers are detected, their 3D positions are used to perform a coarse initial alignment of the point cloud scans. This is achieved through an efficient deterministic search strategy based on residual projections.
-
Fine Registration: After the coarse alignment, the method performs a fine-grained registration of the point clouds using an ICP (Iterative Closest Point) algorithm. This helps refine the alignment and correct any remaining misalignments.
The authors evaluate the L-PR method on several datasets, including both synthetic and real-world scenarios. The results demonstrate that L-PR can achieve accurate registration of unordered, low-overlap multiview point clouds, outperforming state-of-the-art techniques like FreeReg and deep learning-based methods.
Critical Analysis
The L-PR method presents a promising approach for addressing the challenge of registering multiview point clouds with limited overlap. However, there are a few potential limitations and areas for further research:
-
Dependence on Fiducial Markers: The method relies on the presence of fiducial markers in the environment, which may not always be feasible or practical in real-world scenarios. Exploring ways to reduce or eliminate the need for these markers could broaden the applicability of the approach.
-
Sensitivity to Marker Placement: The performance of L-PR may be influenced by the distribution and placement of the fiducial markers in the environment. Investigating strategies to optimize marker placement could help improve the robustness of the method.
-
Scalability for Large-scale Environments: While the authors demonstrate the effectiveness of L-PR on smaller datasets, its performance and computational efficiency in handling large-scale, complex environments should be further explored.
-
Potential Interference with Other Sensors: The presence of the fiducial markers in the environment may need to be considered when integrating the LiDAR-based 3D reconstruction with other sensor modalities, such as cameras or radar, to ensure seamless multi-sensor fusion.
Conclusion
L-PR: Exploiting LiDAR Fiducial Marker for Unordered Low Overlap Multiview Point Cloud Registration presents a novel approach for registering multiview point cloud data, even in scenarios with limited overlap between the scans. By leveraging fiducial markers detected in the LiDAR data, the method can achieve accurate alignment and 3D reconstruction, addressing a common challenge in real-world 3D perception applications.
While the method has some potential limitations, the authors' work demonstrates the value of incorporating prior knowledge, such as fiducial markers, to enhance the performance of point cloud registration algorithms. As the field of 3D sensing and reconstruction continues to evolve, techniques like L-PR could play a crucial role in enabling more robust and reliable 3D perception systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
L-PR: Exploiting LiDAR Fiducial Marker for Unordered Low Overlap Multiview Point Cloud Registration
Yibo Liu, Jinjun Shan, Amaldev Haridevan, Shuo Zhang
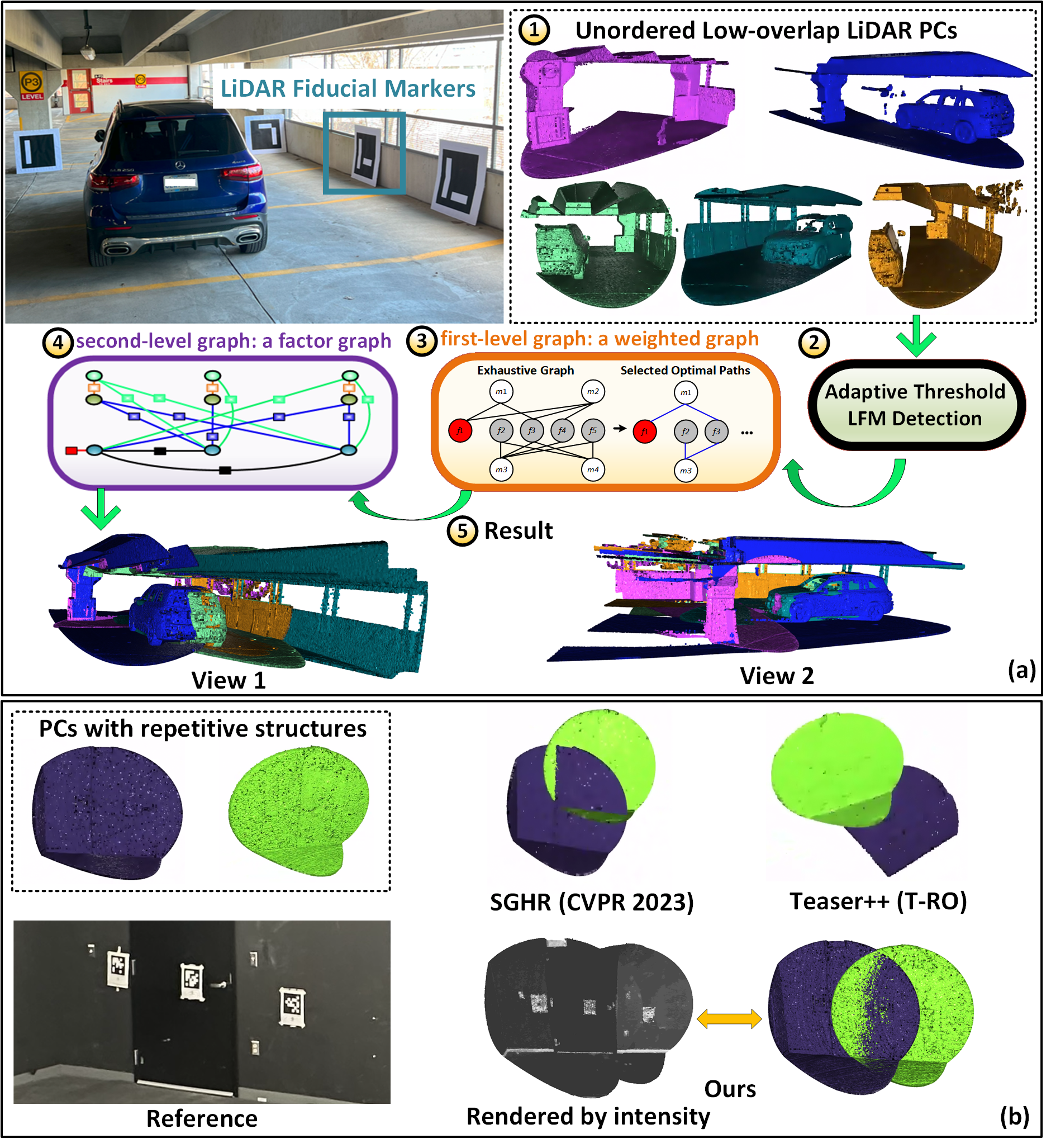
Point cloud registration is a prerequisite for many applications in computer vision and robotics. Most existing methods focus on pairwise registration of two point clouds with high overlap. Although there have been some methods for low overlap cases, they struggle in degraded scenarios. This paper introduces a novel framework dubbed L-PR, designed to register unordered low overlap multiview point clouds leveraging LiDAR fiducial markers. We refer to them as LiDAR fiducial markers, but they are the same as the popular AprilTag and ArUco markers, thin sheets of paper that do not affect the 3D geometry of the environment. We first propose an improved adaptive threshold marker detection method to provide robust detection results when the viewpoints among point clouds change dramatically. Then, we formulate the unordered multiview point cloud registration problem as a maximum a-posteriori (MAP) problem and develop a framework consisting of two levels of graphs to address it. The first-level graph, constructed as a weighted graph, is designed to efficiently and optimally infer initial values of scan poses from the unordered set. The second-level graph is constructed as a factor graph. By globally optimizing the variables on the graph, including scan poses, marker poses, and marker corner positions, we tackle the MAP problem. We conduct both qualitative and quantitative experiments to demonstrate that the proposed method surpasses previous state-of-the-art (SOTA) methods and to showcase that L-PR can serve as a low-cost and efficient tool for 3D asset collection and training data collection. In particular, we collect a new dataset named Livox-3DMatch using L-PR and incorporate it into the training of the SOTA learning-based method, SGHR, which brings evident improvements for SGHR on various benchmarks.
Read more8/6/2024

0
Incremental Multiview Point Cloud Registration
Xiaoya Cheng, Yu Liu, Maojun Zhang, Shen Yan
In this paper, we present a novel approach for multiview point cloud registration. Different from previous researches that typically employ a global scheme for multiview registration, we propose to adopt an incremental pipeline to progressively align scans into a canonical coordinate system. Specifically, drawing inspiration from image-based 3D reconstruction, our approach first builds a sparse scan graph with scan retrieval and geometric verification. Then, we perform incremental registration via initialization, next scan selection and registration, Track create and continue, and Bundle Adjustment. Additionally, for detector-free matchers, we incorporate a Track refinement process. This process primarily constructs a coarse multiview registration and refines the model by adjusting the positions of the keypoints on the Track. Experiments demonstrate that the proposed framework outperforms existing multiview registration methods on three benchmark datasets. The code is available at https://github.com/Choyaa/IncreMVR.
Read more7/9/2024

0
Incremental Multiview Point Cloud Registration with Two-stage Candidate Retrieval
Shiqi Li, Jihua Zhu, Yifan Xie, Mingchen Zhu
Multiview point cloud registration serves as a cornerstone of various computer vision tasks. Previous approaches typically adhere to a global paradigm, where a pose graph is initially constructed followed by motion synchronization to determine the absolute pose. However, this separated approach may not fully leverage the characteristics of multiview registration and might struggle with low-overlap scenarios. In this paper, we propose an incremental multiview point cloud registration method that progressively registers all scans to a growing meta-shape. To determine the incremental ordering, we employ a two-stage coarse-to-fine strategy for point cloud candidate retrieval. The first stage involves the coarse selection of scans based on neighbor fusion-enhanced global aggregation features, while the second stage further reranks candidates through geometric-based matching. Additionally, we apply a transformation averaging technique to mitigate accumulated errors during the registration process. Finally, we utilize a Reservoir sampling-based technique to address density variance issues while reducing computational load. Comprehensive experimental results across various benchmarks validate the effectiveness and generalization of our approach.
Read more7/11/2024
📉
0
Fiducial Tag Localization on a 3D LiDAR Prior Map
Yibo Liu, Jinjun Shan, Hunter Schofield
The LiDAR fiducial tag, akin to the well-known AprilTag used in camera applications, serves as a convenient resource to impart artificial features to the LiDAR sensor, facilitating robotics applications. Unfortunately, the existing LiDAR fiducial tag localization methods do not apply to 3D LiDAR maps while resolving this problem is beneficial to LiDAR-based relocalization and navigation. In this paper, we develop a novel approach to directly localize fiducial tags on a 3D LiDAR prior map, returning the tag poses (labeled by ID number) and vertex locations (labeled by index) w.r.t. the global coordinate system of the map. In particular, considering that fiducial tags are thin sheet objects indistinguishable from the attached planes, we design a new pipeline that gradually analyzes the 3D point cloud of the map from the intensity and geometry perspectives, extracting potential tag-containing point clusters. Then, we introduce an intermediate-plane-based method to further check if each potential cluster has a tag and compute the vertex locations and tag pose if found. We conduct both qualitative and quantitative experiments to demonstrate that our approach is the first method applicable to localize tags on a 3D LiDAR map while achieving better accuracy compared to previous methods. The open-source implementation of this work is available at: https://github.com/York-SDCNLab/Marker-Detection-General.
Read more6/6/2024