Fiducial Tag Localization on a 3D LiDAR Prior Map

0
📉
Sign in to get full access
Overview
- Proposes a new approach to directly localize fiducial tags on a 3D LiDAR prior map
- Addresses limitations of existing LiDAR fiducial tag localization methods that do not apply to 3D LiDAR maps
- Aims to enable LiDAR-based relocalization and navigation applications
Plain English Explanation
The paper introduces a novel method to locate special markers called "fiducial tags" within 3D maps created by LiDAR sensors. These tags are similar to the well-known AprilTags used in camera-based applications, but they can be difficult to detect in 3D LiDAR data.
The key innovation is a pipeline that analyzes the 3D point cloud data from multiple perspectives - intensity and geometry - to identify potential tag locations. It then uses an "intermediate plane" technique to confirm the presence of a tag and determine its precise position and orientation within the 3D map.
This is important because being able to reliably locate these tags in 3D LiDAR maps can enable more robust localization and navigation for robotics applications that use LiDAR sensors, such as autonomous vehicles or drones.
Technical Explanation
The paper proposes a novel approach to directly localize fiducial tags on a 3D LiDAR prior map. It addresses the limitation of existing LiDAR fiducial tag localization methods that do not apply to 3D LiDAR maps.
The key aspects of the proposed method are:
- Analyzing the 3D point cloud data from both intensity and geometry perspectives to extract potential tag-containing point clusters.
- Introducing an "intermediate-plane-based" technique to further verify if each potential cluster contains a tag and compute the vertex locations and tag pose if a tag is detected.
The authors conduct both qualitative and quantitative experiments to demonstrate that their approach is the first method applicable to localizing tags on a 3D LiDAR map while achieving better accuracy compared to previous methods.
Critical Analysis
The paper presents a promising approach to addressing the challenge of localizing fiducial tags in 3D LiDAR maps, which is an important capability for LiDAR-based robotics applications. However, the authors acknowledge some limitations:
- The method may struggle with tags that are partially occluded or have low-intensity returns in the LiDAR data.
- The performance of the technique may degrade in complex environments with many planar surfaces that could be mistaken for tags.
Further research could explore ways to improve the robustness of the tag detection and localization, such as incorporating additional sensor modalities or leveraging learning-based approaches. Additionally, validating the method's performance in a wider range of real-world scenarios would help demonstrate its practical applicability.
Conclusion
This paper presents a novel approach to directly localize fiducial tags on 3D LiDAR maps, which is a crucial capability for enabling robust LiDAR-based relocalization and navigation in robotics applications. The authors' innovative pipeline for analyzing point cloud data from multiple perspectives and verifying tag locations using an "intermediate-plane-based" technique represents an important step forward in this domain. While the method has some limitations, it demonstrates the potential for further advancements in LiDAR-based fiducial tag localization, with significant implications for the development of more reliable and autonomous robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📉
0
Fiducial Tag Localization on a 3D LiDAR Prior Map
Yibo Liu, Jinjun Shan, Hunter Schofield
The LiDAR fiducial tag, akin to the well-known AprilTag used in camera applications, serves as a convenient resource to impart artificial features to the LiDAR sensor, facilitating robotics applications. Unfortunately, the existing LiDAR fiducial tag localization methods do not apply to 3D LiDAR maps while resolving this problem is beneficial to LiDAR-based relocalization and navigation. In this paper, we develop a novel approach to directly localize fiducial tags on a 3D LiDAR prior map, returning the tag poses (labeled by ID number) and vertex locations (labeled by index) w.r.t. the global coordinate system of the map. In particular, considering that fiducial tags are thin sheet objects indistinguishable from the attached planes, we design a new pipeline that gradually analyzes the 3D point cloud of the map from the intensity and geometry perspectives, extracting potential tag-containing point clusters. Then, we introduce an intermediate-plane-based method to further check if each potential cluster has a tag and compute the vertex locations and tag pose if found. We conduct both qualitative and quantitative experiments to demonstrate that our approach is the first method applicable to localize tags on a 3D LiDAR map while achieving better accuracy compared to previous methods. The open-source implementation of this work is available at: https://github.com/York-SDCNLab/Marker-Detection-General.
Read more6/6/2024

0
YoloTag: Vision-based Robust UAV Navigation with Fiducial Markers
Sourav Raxit, Simant Bahadur Singh, Abdullah Al Redwan Newaz
By harnessing fiducial markers as visual landmarks in the environment, Unmanned Aerial Vehicles (UAVs) can rapidly build precise maps and navigate spaces safely and efficiently, unlocking their potential for fluent collaboration and coexistence with humans. Existing fiducial marker methods rely on handcrafted feature extraction, which sacrifices accuracy. On the other hand, deep learning pipelines for marker detection fail to meet real-time runtime constraints crucial for navigation applications. In this work, we propose YoloTag textemdash a real-time fiducial marker-based localization system. YoloTag uses a lightweight YOLO v8 object detector to accurately detect fiducial markers in images while meeting the runtime constraints needed for navigation. The detected markers are then used by an efficient perspective-n-point algorithm to estimate UAV states. However, this localization system introduces noise, causing instability in trajectory tracking. To suppress noise, we design a higher-order Butterworth filter that effectively eliminates noise through frequency domain analysis. We evaluate our algorithm through real-robot experiments in an indoor environment, comparing the trajectory tracking performance of our method against other approaches in terms of several distance metrics.
Read more9/5/2024

0
Accurate Prior-centric Monocular Positioning with Offline LiDAR Fusion
Jinhao He, Huaiyang Huang, Shuyang Zhang, Jianhao Jiao, Chengju Liu, Ming Liu
Unmanned vehicles usually rely on Global Positioning System (GPS) and Light Detection and Ranging (LiDAR) sensors to achieve high-precision localization results for navigation purpose. However, this combination with their associated costs and infrastructure demands, poses challenges for widespread adoption in mass-market applications. In this paper, we aim to use only a monocular camera to achieve comparable onboard localization performance by tracking deep-learning visual features on a LiDAR-enhanced visual prior map. Experiments show that the proposed algorithm can provide centimeter-level global positioning results with scale, which is effortlessly integrated and favorable for low-cost robot system deployment in real-world applications.
Read more7/15/2024
0
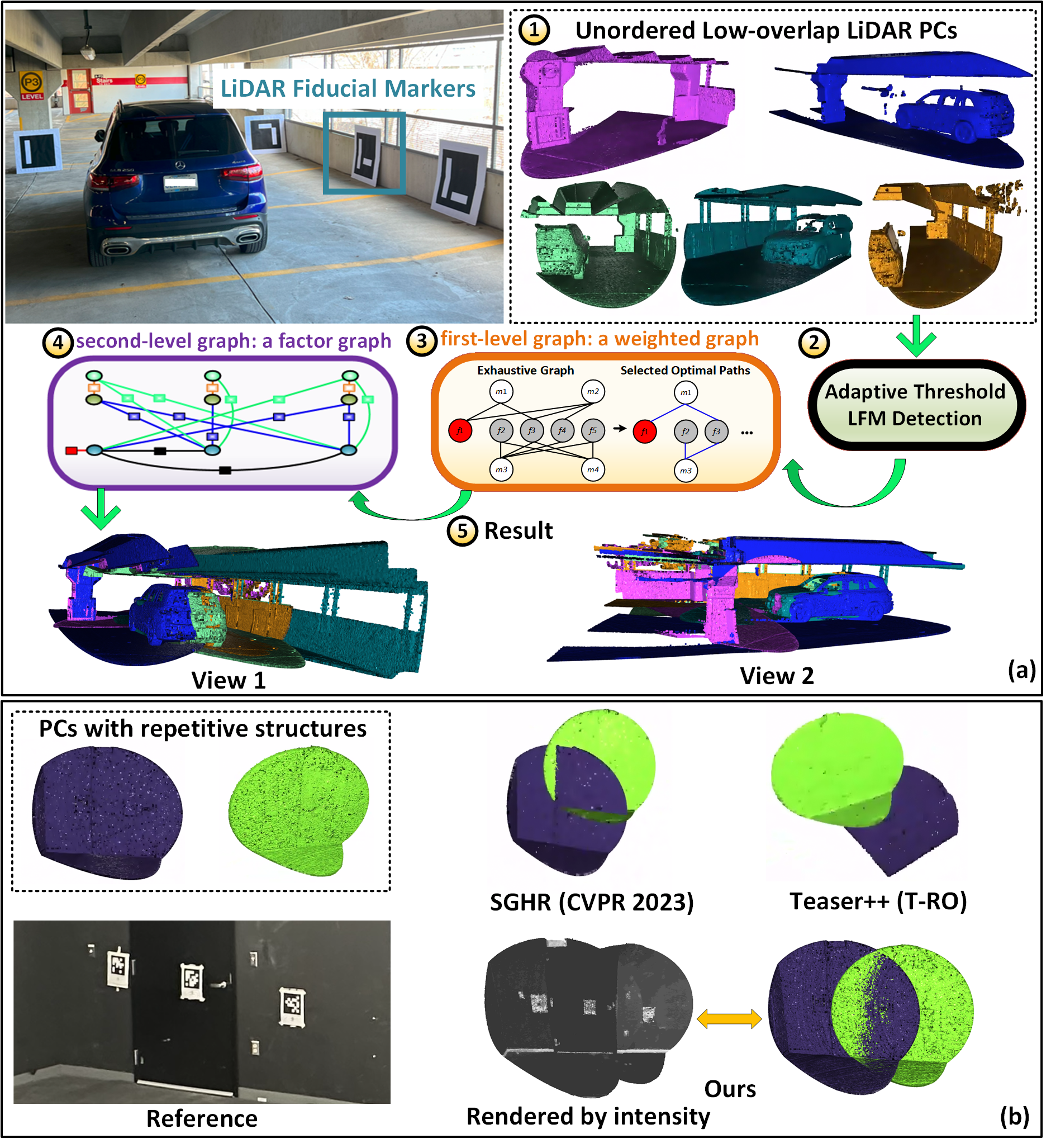
L-PR: Exploiting LiDAR Fiducial Marker for Unordered Low Overlap Multiview Point Cloud Registration
Yibo Liu, Jinjun Shan, Amaldev Haridevan, Shuo Zhang
Point cloud registration is a prerequisite for many applications in computer vision and robotics. Most existing methods focus on pairwise registration of two point clouds with high overlap. Although there have been some methods for low overlap cases, they struggle in degraded scenarios. This paper introduces a novel framework dubbed L-PR, designed to register unordered low overlap multiview point clouds leveraging LiDAR fiducial markers. We refer to them as LiDAR fiducial markers, but they are the same as the popular AprilTag and ArUco markers, thin sheets of paper that do not affect the 3D geometry of the environment. We first propose an improved adaptive threshold marker detection method to provide robust detection results when the viewpoints among point clouds change dramatically. Then, we formulate the unordered multiview point cloud registration problem as a maximum a-posteriori (MAP) problem and develop a framework consisting of two levels of graphs to address it. The first-level graph, constructed as a weighted graph, is designed to efficiently and optimally infer initial values of scan poses from the unordered set. The second-level graph is constructed as a factor graph. By globally optimizing the variables on the graph, including scan poses, marker poses, and marker corner positions, we tackle the MAP problem. We conduct both qualitative and quantitative experiments to demonstrate that the proposed method surpasses previous state-of-the-art (SOTA) methods and to showcase that L-PR can serve as a low-cost and efficient tool for 3D asset collection and training data collection. In particular, we collect a new dataset named Livox-3DMatch using L-PR and incorporate it into the training of the SOTA learning-based method, SGHR, which brings evident improvements for SGHR on various benchmarks.
Read more8/6/2024