Lane Detection using Graph Search and Geometric Constraints for Formula Student Driverless
2405.16369
0
0

Abstract
Lane detection is a fundamental task in autonomous driving. While the problem is typically formulated as the detection of continuous boundaries, we study the problem of detecting lane boundaries that are sparsely marked by 2D points with many false positives. This problem arises in the Formula Student Driverless (FSD) competition and is challenging due to its inherent ambiguity. Previous methods are inefficient and unable to find long-horizon solutions. We propose a deterministic algorithm called CLC that uses backtracking graph search with a learned likelihood function to overcome these limitations. We impose geometric constraints on the lane candidates to guarantee a geometrically sound lane. Our exhaustive search leads to finding the global optimum in 45% of instances, and the algorithm is overall robust to up to 50% false positives. Our algorithm runs in less than 15 ms on a single CPU core, meeting the low latency requirements of autonomous racing. We extensively evaluate our method on real data and realistic racetrack layouts, and show that it outperforms the state-of-the-art by detecting long lanes over 100 m with few (0.6%) critical failures. This allows our autonomous racecar to drive close to its physical limits on a previously unknown racetrack without being limited by perception. We release our dataset with realistic Formula Student racetracks to enable further research.
Create account to get full access
Overview
- Presents a novel lane detection approach for autonomous Formula Student vehicles
- Uses graph search and geometric constraints to accurately identify lane boundaries
- Evaluated on real-world datasets, demonstrating improved performance over existing methods
Plain English Explanation
The paper describes a new system for detecting and tracking lane boundaries on the road, which is a critical capability for self-driving cars. The researchers developed an approach that combines graph search and geometric constraints to accurately identify the location of lane markers.
This is important for autonomous vehicles like those used in Formula Student competitions, which need to navigate complex race tracks and stay within the designated lanes. The researchers evaluated their system using real-world driving data and showed that it outperforms other state-of-the-art lane detection methods. This suggests their approach could be a valuable tool for improving the safety and reliability of self-driving car systems.
The key idea is to use graph search algorithms to efficiently explore possible lane configurations, guided by geometric rules about the expected shape and positioning of lanes. This allows the system to robustly handle challenging scenarios like occlusions, shadows, and faded lane markings that can confuse other detection approaches.
Technical Explanation
The paper presents a novel lane detection pipeline that combines graph search and geometric constraints to accurately identify lane boundaries in road scenes. The authors first use a convolutional neural network to generate a set of candidate lane points from the input image.
They then construct a graph where each candidate point is a node, and edges represent potential lane segments. A graph search algorithm is employed to find the most likely set of connected lane segments that satisfy geometric constraints such as smoothness, parallelism, and consistency with the expected lane width.
This approach allows the system to efficiently explore the space of possible lane configurations and robustly handle challenging real-world scenarios like occlusions, shadows, and faded lane markings. The authors evaluate their method on several public datasets for lane detection in autonomous driving, demonstrating superior performance compared to state-of-the-art techniques.
Critical Analysis
The paper presents a compelling approach to lane detection that leverages both deep learning and geometric reasoning. By integrating these two complementary techniques, the authors are able to address many of the shortcomings of existing methods, such as their sensitivity to environmental conditions and inability to handle partial occlusions.
However, one potential limitation of the proposed system is its reliance on a fixed set of geometric constraints, which may not generalize well to all road environments. As mentioned in the ElasticLaneNet paper, a more flexible, data-driven approach to modeling lane geometry could further improve the system's robustness.
Additionally, the computational complexity of the graph search algorithm may pose challenges for real-time deployment, especially on resource-constrained embedded systems. The authors do not provide a detailed analysis of the runtime performance of their approach, which would be a useful point of consideration.
Overall, the paper makes a valuable contribution to the field of autonomous driving by demonstrating how the integration of deep learning and geometric reasoning can lead to significant advances in lane detection. Further research to address the identified limitations could lead to even more robust and efficient solutions.
Conclusion
This paper presents a novel lane detection system that combines graph search and geometric constraints to accurately identify lane boundaries in challenging road environments. By leveraging both data-driven and model-based techniques, the proposed approach demonstrates superior performance compared to existing state-of-the-art methods.
The authors' work has important implications for the development of safe and reliable autonomous driving systems, particularly for applications like Formula Student competitions where precise lane-keeping is crucial. The insights gained from this research could also inspire further advancements in lane detection and multi-lane tracking for self-driving vehicles, ultimately contributing to the broader goal of making our roads safer and more accessible for all.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔎
LaneCorrect: Self-supervised Lane Detection
Ming Nie, Xinyue Cai, Hang Xu, Li Zhang
0
0
Lane detection has evolved highly functional autonomous driving system to understand driving scenes even under complex environments. In this paper, we work towards developing a generalized computer vision system able to detect lanes without using any annotation. We make the following contributions: (i) We illustrate how to perform unsupervised 3D lane segmentation by leveraging the distinctive intensity of lanes on the LiDAR point cloud frames, and then obtain the noisy lane labels in the 2D plane by projecting the 3D points; (ii) We propose a novel self-supervised training scheme, dubbed LaneCorrect, that automatically corrects the lane label by learning geometric consistency and instance awareness from the adversarial augmentations; (iii) With the self-supervised pre-trained model, we distill to train a student network for arbitrary target lane (e.g., TuSimple) detection without any human labels; (iv) We thoroughly evaluate our self-supervised method on four major lane detection benchmarks (including TuSimple, CULane, CurveLanes and LLAMAS) and demonstrate excellent performance compared with existing supervised counterpart, whilst showing more effective results on alleviating the domain gap, i.e., training on CULane and test on TuSimple.
4/24/2024

Monocular 3D lane detection for Autonomous Driving: Recent Achievements, Challenges, and Outlooks
Fulong Ma, Weiqing Qi, Guoyang Zhao, Linwei Zheng, Sheng Wang, Yuxuan Liu, Ming Liu
0
0
3D lane detection is essential in autonomous driving as it extracts structural and traffic information from the road in three-dimensional space, aiding self-driving cars in logical, safe, and comfortable path planning and motion control. Given the cost of sensors and the advantages of visual data in color information, 3D lane detection based on monocular vision is an important research direction in the realm of autonomous driving, increasingly gaining attention in both industry and academia. Regrettably, recent advancements in visual perception seem inadequate for the development of fully reliable 3D lane detection algorithms, which also hampers the progress of vision-based fully autonomous vehicles. We believe that there is still considerable room for improvement in 3D lane detection algorithms for autonomous vehicles using visual sensors, and significant enhancements are needed. This review looks back and analyzes the current state of achievements in the field of 3D lane detection research. It covers all current monocular-based 3D lane detection processes, discusses the performance of these cutting-edge algorithms, analyzes the time complexity of various algorithms, and highlights the main achievements and limitations of ongoing research efforts. The survey also includes a comprehensive discussion of available 3D lane detection datasets and the challenges that researchers face but have not yet resolved. Finally, our work outlines future research directions and invites researchers and practitioners to join this exciting field.
4/22/2024

Developing, Analyzing, and Evaluating Vehicular Lane Keeping Algorithms Under Dynamic Lighting and Weather Conditions Using Electric Vehicles
Michael Khalfin, Jack Volgren, Matthew Jones, Luke LeGoullon, Joshua Siegel, Chan-Jin Chung
0
0
Self-driving vehicles have the potential to reduce accidents and fatalities on the road. Many production vehicles already come equipped with basic self-driving capabilities, but have trouble following lanes in adverse lighting and weather conditions. Therefore, we develop, analyze, and evaluate two vehicular lane-keeping algorithms under dynamic weather conditions using a combined deep learning- and hand-crafted approach and an end-to-end deep learning approach. We use image segmentation- and linear-regression based deep learning to drive the vehicle toward the center of the lane, measuring the amount of laps completed, average speed, and average steering error per lap. Our hybrid model completes more laps than our end-to-end deep learning model. In the future, we are interested in combining our algorithms to form one cohesive approach to lane-following.
6/12/2024
LaneCPP: Continuous 3D Lane Detection using Physical Priors
Maximilian Pittner, Joel Janai, Alexandru P. Condurache
0
0
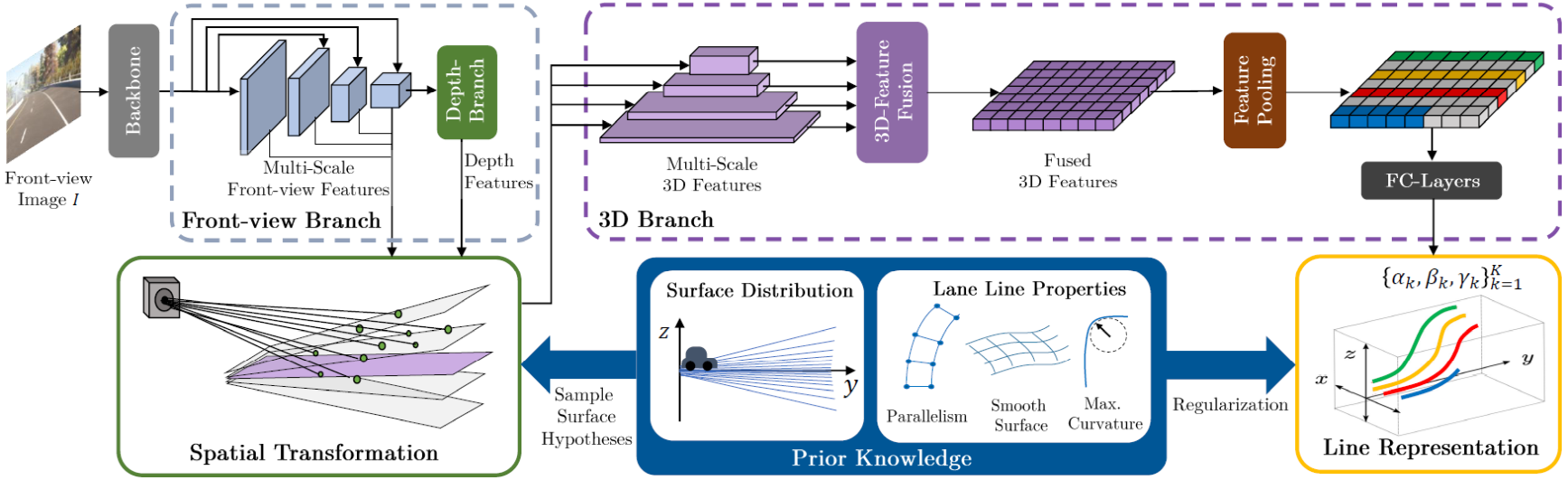
Monocular 3D lane detection has become a fundamental problem in the context of autonomous driving, which comprises the tasks of finding the road surface and locating lane markings. One major challenge lies in a flexible but robust line representation capable of modeling complex lane structures, while still avoiding unpredictable behavior. While previous methods rely on fully data-driven approaches, we instead introduce a novel approach LaneCPP that uses a continuous 3D lane detection model leveraging physical prior knowledge about the lane structure and road geometry. While our sophisticated lane model is capable of modeling complex road structures, it also shows robust behavior since physical constraints are incorporated by means of a regularization scheme that can be analytically applied to our parametric representation. Moreover, we incorporate prior knowledge about the road geometry into the 3D feature space by modeling geometry-aware spatial features, guiding the network to learn an internal road surface representation. In our experiments, we show the benefits of our contributions and prove the meaningfulness of using priors to make 3D lane detection more robust. The results show that LaneCPP achieves state-of-the-art performance in terms of F-Score and geometric errors.
6/13/2024