LaneCorrect: Self-supervised Lane Detection
2404.14671
0
0
🔎
Abstract
Lane detection has evolved highly functional autonomous driving system to understand driving scenes even under complex environments. In this paper, we work towards developing a generalized computer vision system able to detect lanes without using any annotation. We make the following contributions: (i) We illustrate how to perform unsupervised 3D lane segmentation by leveraging the distinctive intensity of lanes on the LiDAR point cloud frames, and then obtain the noisy lane labels in the 2D plane by projecting the 3D points; (ii) We propose a novel self-supervised training scheme, dubbed LaneCorrect, that automatically corrects the lane label by learning geometric consistency and instance awareness from the adversarial augmentations; (iii) With the self-supervised pre-trained model, we distill to train a student network for arbitrary target lane (e.g., TuSimple) detection without any human labels; (iv) We thoroughly evaluate our self-supervised method on four major lane detection benchmarks (including TuSimple, CULane, CurveLanes and LLAMAS) and demonstrate excellent performance compared with existing supervised counterpart, whilst showing more effective results on alleviating the domain gap, i.e., training on CULane and test on TuSimple.
Create account to get full access
Overview
- This research paper presents a novel approach to lane detection for autonomous driving systems without using any human-provided annotations.
- The key contributions include unsupervised 3D lane segmentation using LiDAR data, a self-supervised training scheme called LaneCorrect, and a distillation technique to train a student network for detecting lanes on arbitrary datasets.
- The proposed methods are evaluated on several major lane detection benchmarks and show excellent performance compared to existing supervised counterparts, while also demonstrating improved ability to handle domain shifts.
Plain English Explanation
Self-driving cars rely on accurate detection of lane markings to understand the driving scene and navigate safely. This research paper describes a new computer vision system that can detect lanes without requiring any manually labeled training data.
The researchers first use the distinctive intensity of lanes in 3D LiDAR point cloud data to segment the lanes in an unsupervised way. They then project these 3D lane segments onto the 2D camera image to get noisy lane labels.
Next, they propose a novel "self-supervised" training scheme called LaneCorrect. This automatically refines the noisy lane labels by learning geometric consistency and instance awareness from adversarial data augmentations. The self-supervised pre-trained model is then used to distill a more compact student network that can detect lanes on arbitrary datasets, again without any human labeling.
The researchers evaluate their approach on several standard lane detection benchmarks and show it outperforms existing supervised methods. Importantly, it also demonstrates better performance when training on one dataset (e.g. CULane) and testing on another (e.g. TuSimple), indicating it can better handle real-world domain shifts.
Technical Explanation
The key technical contributions of this paper are:
-
Unsupervised 3D Lane Segmentation: The authors leverage the distinctive intensity of lanes in LiDAR point cloud data to perform 3D lane segmentation in an unsupervised manner. They then project these 3D lane segments onto the 2D camera image to obtain noisy lane labels.
-
Self-Supervised LaneCorrect Training: The authors propose a novel self-supervised training scheme called "LaneCorrect" that automatically refines the noisy lane labels. It learns geometric consistency and instance awareness from adversarial data augmentations to correct the lane annotations.
-
Distillation for Arbitrary Lane Detection: With the self-supervised pre-trained model, the authors distill a compact student network that can detect lanes on arbitrary target datasets (e.g. TuSimple, CULane, CurveLanes, LLAMAS) without any human-provided labels.
The authors thoroughly evaluate their self-supervised method on these four major lane detection benchmarks and demonstrate excellent performance compared to existing supervised counterparts. They also show the method is more effective at alleviating domain shift, for example when training on CULane and testing on TuSimple.
Critical Analysis
The paper presents a compelling approach to lane detection that eliminates the need for manual data labeling, a significant bottleneck in developing robust autonomous driving systems. The self-supervised training scheme and distillation technique are novel and well-designed.
However, the authors do not provide much discussion around the limitations or potential issues with their approach. For example, it's unclear how the method would scale to more complex or varied driving scenes beyond the evaluated benchmarks. There are also open questions about the reliability and generalization of the unsupervised 3D lane segmentation, and how sensitive the approach is to LiDAR sensor quality and calibration.
Additionally, while the results demonstrate strong performance, further analysis of failure cases and comparisons to human-level annotation quality would help contextualize the approach's real-world applicability. Exploring ways to incorporate human feedback or leverage limited labeled data to further improve the self-supervised training could also be valuable directions for future research.
Overall, this is an impressive technical contribution that brings us closer to more scalable and adaptable lane detection for autonomous driving. However, as with any research, there remain opportunities to build upon the insights and further develop the capabilities of the system.
Conclusion
This research paper presents a novel self-supervised approach to lane detection for autonomous driving that eliminates the need for manual data annotation. By leveraging unsupervised 3D lane segmentation, a self-supervised training scheme, and distillation, the authors demonstrate a lane detection system that outperforms existing supervised counterparts while also showing improved robustness to domain shifts.
The technical innovations and strong empirical results make this a compelling contribution to the field of computer vision for autonomous driving. While there are still some open questions and areas for further exploration, this work represents an important step towards more scalable and adaptable lane detection solutions that can accelerate the development of safe and reliable self-driving cars.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Monocular 3D lane detection for Autonomous Driving: Recent Achievements, Challenges, and Outlooks
Fulong Ma, Weiqing Qi, Guoyang Zhao, Linwei Zheng, Sheng Wang, Yuxuan Liu, Ming Liu
0
0
3D lane detection is essential in autonomous driving as it extracts structural and traffic information from the road in three-dimensional space, aiding self-driving cars in logical, safe, and comfortable path planning and motion control. Given the cost of sensors and the advantages of visual data in color information, 3D lane detection based on monocular vision is an important research direction in the realm of autonomous driving, increasingly gaining attention in both industry and academia. Regrettably, recent advancements in visual perception seem inadequate for the development of fully reliable 3D lane detection algorithms, which also hampers the progress of vision-based fully autonomous vehicles. We believe that there is still considerable room for improvement in 3D lane detection algorithms for autonomous vehicles using visual sensors, and significant enhancements are needed. This review looks back and analyzes the current state of achievements in the field of 3D lane detection research. It covers all current monocular-based 3D lane detection processes, discusses the performance of these cutting-edge algorithms, analyzes the time complexity of various algorithms, and highlights the main achievements and limitations of ongoing research efforts. The survey also includes a comprehensive discussion of available 3D lane detection datasets and the challenges that researchers face but have not yet resolved. Finally, our work outlines future research directions and invites researchers and practitioners to join this exciting field.
4/22/2024
❗
Intelligent Anomaly Detection for Lane Rendering Using Transformer with Self-Supervised Pre-Training and Customized Fine-Tuning
Yongqi Dong, Xingmin Lu, Ruohan Li, Wei Song, Bart van Arem, Haneen Farah
0
0
The burgeoning navigation services using digital maps provide great convenience to drivers. Nevertheless, the presence of anomalies in lane rendering map images occasionally introduces potential hazards, as such anomalies can be misleading to human drivers and consequently contribute to unsafe driving conditions. In response to this concern and to accurately and effectively detect the anomalies, this paper transforms lane rendering image anomaly detection into a classification problem and proposes a four-phase pipeline consisting of data pre-processing, self-supervised pre-training with the masked image modeling (MiM) method, customized fine-tuning using cross-entropy based loss with label smoothing, and post-processing to tackle it leveraging state-of-the-art deep learning techniques, especially those involving Transformer models. Various experiments verify the effectiveness of the proposed pipeline. Results indicate that the proposed pipeline exhibits superior performance in lane rendering image anomaly detection, and notably, the self-supervised pre-training with MiM can greatly enhance the detection accuracy while significantly reducing the total training time. For instance, employing the Swin Transformer with Uniform Masking as self-supervised pretraining (Swin-Trans-UM) yielded a heightened accuracy at 94.77% and an improved Area Under The Curve (AUC) score of 0.9743 compared with the pure Swin Transformer without pre-training (Swin-Trans) with an accuracy of 94.01% and an AUC of 0.9498. The fine-tuning epochs were dramatically reduced to 41 from the original 280. In conclusion, the proposed pipeline, with its incorporation of self-supervised pre-training using MiM and other advanced deep learning techniques, emerges as a robust solution for enhancing the accuracy and efficiency of lane rendering image anomaly detection in digital navigation systems.
5/30/2024

Lane Detection using Graph Search and Geometric Constraints for Formula Student Driverless
Ivo Ivanov, Carsten Markgraf
0
0
Lane detection is a fundamental task in autonomous driving. While the problem is typically formulated as the detection of continuous boundaries, we study the problem of detecting lane boundaries that are sparsely marked by 2D points with many false positives. This problem arises in the Formula Student Driverless (FSD) competition and is challenging due to its inherent ambiguity. Previous methods are inefficient and unable to find long-horizon solutions. We propose a deterministic algorithm called CLC that uses backtracking graph search with a learned likelihood function to overcome these limitations. We impose geometric constraints on the lane candidates to guarantee a geometrically sound lane. Our exhaustive search leads to finding the global optimum in 45% of instances, and the algorithm is overall robust to up to 50% false positives. Our algorithm runs in less than 15 ms on a single CPU core, meeting the low latency requirements of autonomous racing. We extensively evaluate our method on real data and realistic racetrack layouts, and show that it outperforms the state-of-the-art by detecting long lanes over 100 m with few (0.6%) critical failures. This allows our autonomous racecar to drive close to its physical limits on a previously unknown racetrack without being limited by perception. We release our dataset with realistic Formula Student racetracks to enable further research.
5/28/2024
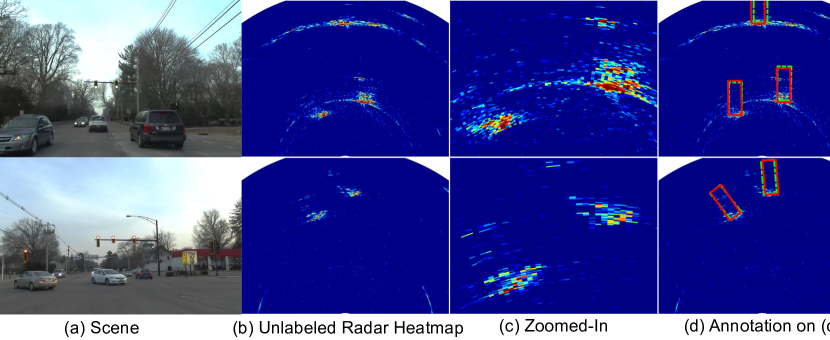
Bootstrapping Autonomous Driving Radars with Self-Supervised Learning
Yiduo Hao, Sohrab Madani, Junfeng Guan, Mohammed Alloulah, Saurabh Gupta, Haitham Hassanieh
0
0
The perception of autonomous vehicles using radars has attracted increased research interest due its ability to operate in fog and bad weather. However, training radar models is hindered by the cost and difficulty of annotating large-scale radar data. To overcome this bottleneck, we propose a self-supervised learning framework to leverage the large amount of unlabeled radar data to pre-train radar-only embeddings for self-driving perception tasks. The proposed method combines radar-to-radar and radar-to-vision contrastive losses to learn a general representation from unlabeled radar heatmaps paired with their corresponding camera images. When used for downstream object detection, we demonstrate that the proposed self-supervision framework can improve the accuracy of state-of-the-art supervised baselines by $5.8%$ in mAP. Code is available at url{https://github.com/yiduohao/Radical}.
4/19/2024