Monocular 3D lane detection for Autonomous Driving: Recent Achievements, Challenges, and Outlooks
2404.06860
0
0

Abstract
3D lane detection is essential in autonomous driving as it extracts structural and traffic information from the road in three-dimensional space, aiding self-driving cars in logical, safe, and comfortable path planning and motion control. Given the cost of sensors and the advantages of visual data in color information, 3D lane detection based on monocular vision is an important research direction in the realm of autonomous driving, increasingly gaining attention in both industry and academia. Regrettably, recent advancements in visual perception seem inadequate for the development of fully reliable 3D lane detection algorithms, which also hampers the progress of vision-based fully autonomous vehicles. We believe that there is still considerable room for improvement in 3D lane detection algorithms for autonomous vehicles using visual sensors, and significant enhancements are needed. This review looks back and analyzes the current state of achievements in the field of 3D lane detection research. It covers all current monocular-based 3D lane detection processes, discusses the performance of these cutting-edge algorithms, analyzes the time complexity of various algorithms, and highlights the main achievements and limitations of ongoing research efforts. The survey also includes a comprehensive discussion of available 3D lane detection datasets and the challenges that researchers face but have not yet resolved. Finally, our work outlines future research directions and invites researchers and practitioners to join this exciting field.
Create account to get full access
Overview
• This paper discusses recent advancements, challenges, and future directions in the field of monocular 3D lane detection for autonomous driving.
• It covers background information on lane detection techniques and related works, as well as the latest deep learning-based approaches for perceiving 3D lane geometry from a single camera.
• The paper also highlights key challenges, such as handling occlusions, handling diverse lane appearances, and generalizing to unseen environments, and outlines potential solutions and future research directions.
Plain English Explanation
Autonomous vehicles need to be able to detect and understand the lanes on the road in order to drive safely and efficiently. Traditionally, this has been done using multiple cameras or sensors, which can be expensive and complex.
This paper looks at the latest research on using a single camera, or "monocular" system, to detect the 3D shape and position of the lanes. By just using one camera, this could make autonomous driving technology more affordable and accessible.
The paper discusses some of the recent breakthroughs in this area, where deep learning models have been able to accurately reconstruct the 3D geometry of lanes from a single 2D image. This is a significant technical achievement, as inferring 3D information from a 2D view is a challenging computer vision problem.
However, the paper also highlights that there are still some key challenges to overcome. For example, the models need to be able to handle situations where the lanes are partially obscured, or when the appearance of the lanes is very different from what the model has been trained on.
The paper outlines potential solutions to these problems, such as using additional cues like the car's motion or the surrounding environment. It also discusses how future research could make these 3D lane detection systems more robust and able to generalize to a wider range of real-world driving scenarios.
Overall, this work represents an important step towards making autonomous vehicles that are more affordable and reliable, by enabling them to understand the 3D layout of the road using just a single camera.
Technical Explanation
This paper provides a comprehensive review of recent advancements, challenges, and future outlooks in the field of monocular 3D lane detection for autonomous driving.
The authors first discuss the background and related works in lane detection, including both traditional computer vision techniques as well as more recent deep learning-based approaches. They highlight the advantages of monocular 3D lane detection, such as reduced sensor complexity and cost compared to multi-camera or LiDAR-based systems.
The core of the paper then focuses on the latest deep learning-based methods for monocular 3D lane detection, which can infer the 3D geometry of lanes from a single 2D image. This includes techniques like end-to-end lane detection, incorporating motion cues, and leveraging 2D lane detection as an intermediate step.
The authors also delve into the key challenges faced by these monocular 3D lane detection systems, such as handling occlusions, dealing with diverse lane appearances, and generalizing to unseen environments. They discuss potential solutions and future research directions to address these issues.
Critical Analysis
The paper provides a thorough and well-structured overview of the state-of-the-art in monocular 3D lane detection, highlighting the significant progress made in this domain. The authors acknowledge the remaining challenges and limitations, such as the need for improved robustness to occlusions and better generalization capabilities.
However, one potential area for further discussion could be the accuracy and reliability of these monocular 3D lane detection systems in real-world autonomous driving scenarios. The paper focuses on the technical achievements, but more analysis on the practical performance and safety implications would be valuable.
Additionally, the paper does not delve deeply into the ethical considerations and societal impacts of deploying such technology in autonomous vehicles. As these systems become more advanced, it will be important to carefully examine issues like fairness, accountability, and the potential for unintended consequences.
Conclusion
This paper provides a comprehensive overview of the recent advancements, challenges, and future directions in monocular 3D lane detection for autonomous driving. The ability to infer the 3D geometry of the road from a single camera is a significant technical achievement, with the potential to make autonomous driving systems more affordable and accessible.
However, the paper also highlights the remaining challenges, such as handling occlusions and improving generalization, which will require further research and innovation. As these monocular 3D lane detection systems continue to evolve, it will be crucial to carefully consider the practical, ethical, and societal implications of deploying such technology in real-world autonomous vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
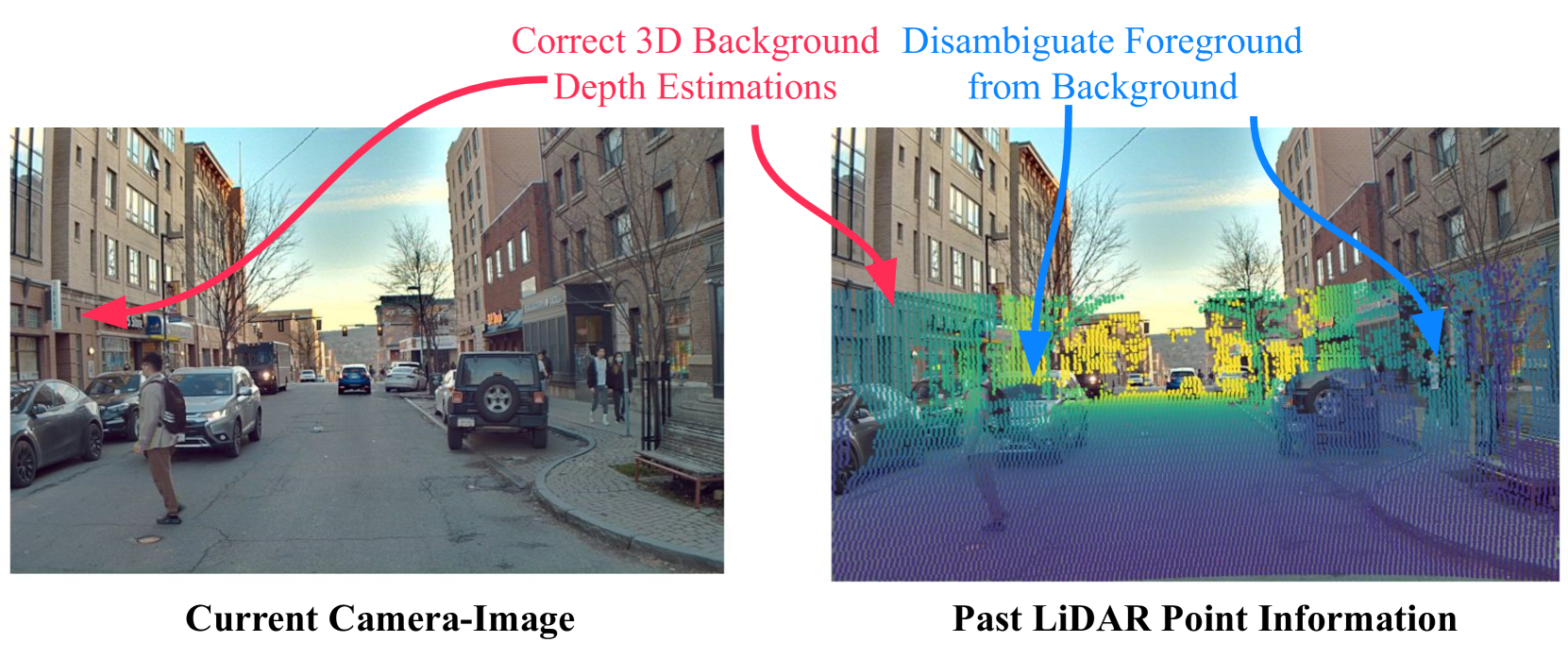
Better Monocular 3D Detectors with LiDAR from the Past
Yurong You, Cheng Perng Phoo, Carlos Andres Diaz-Ruiz, Katie Z Luo, Wei-Lun Chao, Mark Campbell, Bharath Hariharan, Kilian Q Weinberger
0
0
Accurate 3D object detection is crucial to autonomous driving. Though LiDAR-based detectors have achieved impressive performance, the high cost of LiDAR sensors precludes their widespread adoption in affordable vehicles. Camera-based detectors are cheaper alternatives but often suffer inferior performance compared to their LiDAR-based counterparts due to inherent depth ambiguities in images. In this work, we seek to improve monocular 3D detectors by leveraging unlabeled historical LiDAR data. Specifically, at inference time, we assume that the camera-based detectors have access to multiple unlabeled LiDAR scans from past traversals at locations of interest (potentially from other high-end vehicles equipped with LiDAR sensors). Under this setup, we proposed a novel, simple, and end-to-end trainable framework, termed AsyncDepth, to effectively extract relevant features from asynchronous LiDAR traversals of the same location for monocular 3D detectors. We show consistent and significant performance gain (up to 9 AP) across multiple state-of-the-art models and datasets with a negligible additional latency of 9.66 ms and a small storage cost.
4/11/2024

DV-3DLane: End-to-end Multi-modal 3D Lane Detection with Dual-view Representation
Yueru Luo, Shuguang Cui, Zhen Li
0
0
Accurate 3D lane estimation is crucial for ensuring safety in autonomous driving. However, prevailing monocular techniques suffer from depth loss and lighting variations, hampering accurate 3D lane detection. In contrast, LiDAR points offer geometric cues and enable precise localization. In this paper, we present DV-3DLane, a novel end-to-end Dual-View multi-modal 3D Lane detection framework that synergizes the strengths of both images and LiDAR points. We propose to learn multi-modal features in dual-view spaces, i.e., perspective view (PV) and bird's-eye-view (BEV), effectively leveraging the modal-specific information. To achieve this, we introduce three designs: 1) A bidirectional feature fusion strategy that integrates multi-modal features into each view space, exploiting their unique strengths. 2) A unified query generation approach that leverages lane-aware knowledge from both PV and BEV spaces to generate queries. 3) A 3D dual-view deformable attention mechanism, which aggregates discriminative features from both PV and BEV spaces into queries for accurate 3D lane detection. Extensive experiments on the public benchmark, OpenLane, demonstrate the efficacy and efficiency of DV-3DLane. It achieves state-of-the-art performance, with a remarkable 11.2 gain in F1 score and a substantial 53.5% reduction in errors. The code is available at url{https://github.com/JMoonr/dv-3dlane}.
6/26/2024
🔎
LaneCorrect: Self-supervised Lane Detection
Ming Nie, Xinyue Cai, Hang Xu, Li Zhang
0
0
Lane detection has evolved highly functional autonomous driving system to understand driving scenes even under complex environments. In this paper, we work towards developing a generalized computer vision system able to detect lanes without using any annotation. We make the following contributions: (i) We illustrate how to perform unsupervised 3D lane segmentation by leveraging the distinctive intensity of lanes on the LiDAR point cloud frames, and then obtain the noisy lane labels in the 2D plane by projecting the 3D points; (ii) We propose a novel self-supervised training scheme, dubbed LaneCorrect, that automatically corrects the lane label by learning geometric consistency and instance awareness from the adversarial augmentations; (iii) With the self-supervised pre-trained model, we distill to train a student network for arbitrary target lane (e.g., TuSimple) detection without any human labels; (iv) We thoroughly evaluate our self-supervised method on four major lane detection benchmarks (including TuSimple, CULane, CurveLanes and LLAMAS) and demonstrate excellent performance compared with existing supervised counterpart, whilst showing more effective results on alleviating the domain gap, i.e., training on CULane and test on TuSimple.
4/24/2024

Vision-based 3D occupancy prediction in autonomous driving: a review and outlook
Yanan Zhang, Jinqing Zhang, Zengran Wang, Junhao Xu, Di Huang
0
0
In recent years, autonomous driving has garnered escalating attention for its potential to relieve drivers' burdens and improve driving safety. Vision-based 3D occupancy prediction, which predicts the spatial occupancy status and semantics of 3D voxel grids around the autonomous vehicle from image inputs, is an emerging perception task suitable for cost-effective perception system of autonomous driving. Although numerous studies have demonstrated the greater advantages of 3D occupancy prediction over object-centric perception tasks, there is still a lack of a dedicated review focusing on this rapidly developing field. In this paper, we first introduce the background of vision-based 3D occupancy prediction and discuss the challenges in this task. Secondly, we conduct a comprehensive survey of the progress in vision-based 3D occupancy prediction from three aspects: feature enhancement, deployment friendliness and label efficiency, and provide an in-depth analysis of the potentials and challenges of each category of methods. Finally, we present a summary of prevailing research trends and propose some inspiring future outlooks. To provide a valuable reference for researchers, a regularly updated collection of related papers, datasets, and codes is organized at https://github.com/zya3d/Awesome-3D-Occupancy-Prediction.
5/7/2024