A Language Agent for Autonomous Driving

0
💬
Sign in to get full access
Overview
- Autonomous driving is a complex challenge that requires integrating human-like intelligence and reasoning capabilities.
- Conventional autonomous driving approaches rely on perception, prediction, and planning pipelines, but do not fully leverage human experiential knowledge and reasoning.
- This paper proposes a novel paradigm shift, called Agent-Driver, that uses Large Language Models (LLMs) as a cognitive agent to bring human-like intelligence into autonomous driving systems.
Plain English Explanation
The paper introduces a new approach to autonomous driving that aims to mimic the way humans drive. Typical self-driving car systems break the task down into separate steps - perceiving the environment, predicting what will happen next, and then planning the car's actions. However, this doesn't fully capture the human intuition and reasoning that goes into driving.
The Agent-Driver system proposed in this paper takes a different approach. It uses a large language model, a type of AI system that can understand and generate human-like text, as the core of the autonomous driving system. This allows the system to have a more human-like understanding of the driving environment and the ability to reason about the best actions to take, similar to how an experienced human driver would.
The key features of the Agent-Driver system include:
- A versatile tool library that the language model can access to perform various driving-related functions
- A "cognitive memory" that stores common sense and experiential knowledge to support decision-making
- A reasoning engine that can engage in chain-of-thought reasoning, task planning, motion planning, and self-reflection
By leveraging the capabilities of large language models, the Agent-Driver system is able to take a more nuanced, human-like approach to autonomous driving. The paper presents experiments showing that this approach significantly outperforms state-of-the-art autonomous driving methods on a benchmark dataset, and also demonstrates superior interpretability and few-shot learning abilities.
Technical Explanation
The paper proposes a Agent-Driver, a novel autonomous driving system that leverages the capabilities of Large Language Models (LLMs) to integrate human-like intelligence and reasoning into the driving pipeline.
Unlike conventional autonomous driving approaches that rely on perception-prediction-planning frameworks, Agent-Driver takes a fundamentally different approach. It introduces a versatile tool library that the LLM can access to perform various driving-related functions, a "cognitive memory" that stores common sense and experiential knowledge to support decision-making, and a reasoning engine capable of chain-of-thought reasoning, task planning, motion planning, and self-reflection.
By empowering the LLM with these capabilities, Agent-Driver is able to reason about driving scenarios in a more nuanced, human-like manner. The paper evaluates this approach on the large-scale nuScenes benchmark and shows that it significantly outperforms state-of-the-art autonomous driving methods. Agent-Driver also demonstrates superior interpretability and few-shot learning abilities compared to these methods.
Critical Analysis
The paper presents a promising approach to incorporating human-like intelligence and reasoning into autonomous driving systems. The use of LLMs as a cognitive agent is a novel and intriguing concept, as it has the potential to imbue self-driving cars with more nuanced decision-making capabilities.
However, the paper does not delve deeply into the specific architectural details or implementation challenges of the Agent-Driver system. It would be helpful to have a more thorough understanding of how the various components (tool library, cognitive memory, reasoning engine) are integrated and how the LLM is leveraged to drive this integration.
Additionally, the paper only reports results on the nuScenes benchmark, which is a dataset focused on urban driving scenarios. It would be valuable to see how the Agent-Driver system performs in a wider range of driving environments, such as highways, rural roads, or adverse weather conditions.
Furthermore, the paper does not address potential limitations or ethical considerations of using LLMs in autonomous driving systems. Issues such as the interpretability of the LLM's decision-making process, the potential for biases or errors in the underlying knowledge base, and the implications for safety and liability will need to be carefully examined.
Conclusion
The Agent-Driver system proposed in this paper represents a significant shift in the approach to autonomous driving, by leveraging the power of Large Language Models to integrate human-like intelligence and reasoning capabilities. The experimental results demonstrate the potential of this approach to outperform conventional autonomous driving methods.
However, the paper raises several questions that warrant further exploration, such as the detailed system architecture, the ability to generalize to diverse driving scenarios, and the potential challenges and ethical considerations of deploying LLM-based autonomous driving systems. As the field of autonomous driving continues to evolve, approaches like Agent-Driver may pave the way for more human-like and adaptable self-driving vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
0
A Language Agent for Autonomous Driving
Jiageng Mao, Junjie Ye, Yuxi Qian, Marco Pavone, Yue Wang
Human-level driving is an ultimate goal of autonomous driving. Conventional approaches formulate autonomous driving as a perception-prediction-planning framework, yet their systems do not capitalize on the inherent reasoning ability and experiential knowledge of humans. In this paper, we propose a fundamental paradigm shift from current pipelines, exploiting Large Language Models (LLMs) as a cognitive agent to integrate human-like intelligence into autonomous driving systems. Our approach, termed Agent-Driver, transforms the traditional autonomous driving pipeline by introducing a versatile tool library accessible via function calls, a cognitive memory of common sense and experiential knowledge for decision-making, and a reasoning engine capable of chain-of-thought reasoning, task planning, motion planning, and self-reflection. Powered by LLMs, our Agent-Driver is endowed with intuitive common sense and robust reasoning capabilities, thus enabling a more nuanced, human-like approach to autonomous driving. We evaluate our approach on the large-scale nuScenes benchmark, and extensive experiments substantiate that our Agent-Driver significantly outperforms the state-of-the-art driving methods by a large margin. Our approach also demonstrates superior interpretability and few-shot learning ability to these methods.
Read more7/30/2024
0
AgentsCoDriver: Large Language Model Empowered Collaborative Driving with Lifelong Learning
Senkang Hu, Zhengru Fang, Zihan Fang, Yiqin Deng, Xianhao Chen, Yuguang Fang
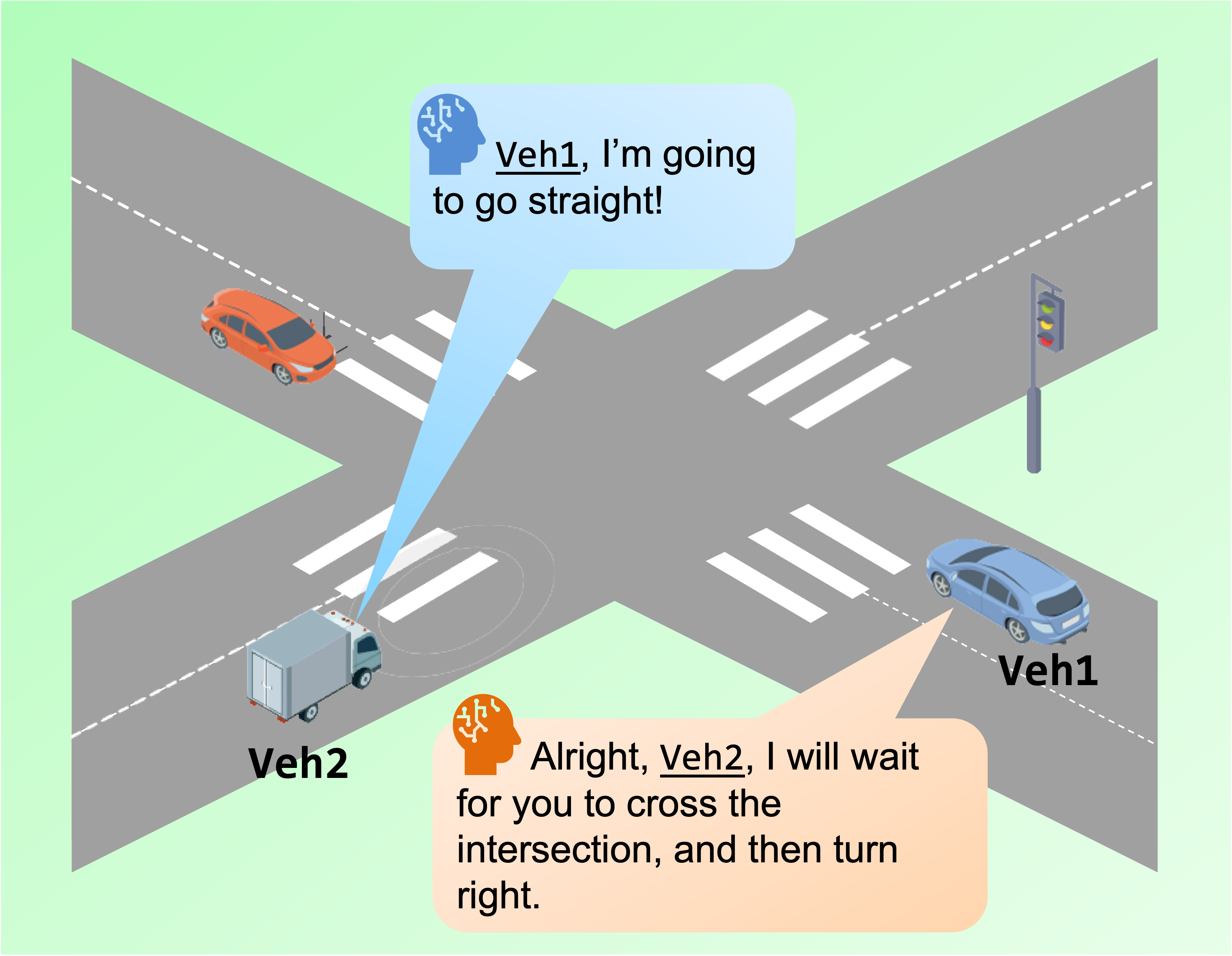
Connected and autonomous driving is developing rapidly in recent years. However, current autonomous driving systems, which are primarily based on data-driven approaches, exhibit deficiencies in interpretability, generalization, and continuing learning capabilities. In addition, the single-vehicle autonomous driving systems lack of the ability of collaboration and negotiation with other vehicles, which is crucial for the safety and efficiency of autonomous driving systems. In order to address these issues, we leverage large language models (LLMs) to develop a novel framework, AgentsCoDriver, to enable multiple vehicles to conduct collaborative driving. AgentsCoDriver consists of five modules: observation module, reasoning engine, cognitive memory module, reinforcement reflection module, and communication module. It can accumulate knowledge, lessons, and experiences over time by continuously interacting with the environment, thereby making itself capable of lifelong learning. In addition, by leveraging the communication module, different agents can exchange information and realize negotiation and collaboration in complex traffic environments. Extensive experiments are conducted and show the superiority of AgentsCoDriver.
Read more4/23/2024

0
SurrealDriver: Designing LLM-powered Generative Driver Agent Framework based on Human Drivers' Driving-thinking Data
Ye Jin, Ruoxuan Yang, Zhijie Yi, Xiaoxi Shen, Huiling Peng, Xiaoan Liu, Jingli Qin, Jiayang Li, Jintao Xie, Peizhong Gao, Guyue Zhou, Jiangtao Gong
Leveraging advanced reasoning capabilities and extensive world knowledge of large language models (LLMs) to construct generative agents for solving complex real-world problems is a major trend. However, LLMs inherently lack embodiment as humans, resulting in suboptimal performance in many embodied decision-making tasks. In this paper, we introduce a framework for building human-like generative driving agents using post-driving self-report driving-thinking data from human drivers as both demonstration and feedback. To capture high-quality, natural language data from drivers, we conducted urban driving experiments, recording drivers' verbalized thoughts under various conditions to serve as chain-of-thought prompts and demonstration examples for the LLM-Agent. The framework's effectiveness was evaluated through simulations and human assessments. Results indicate that incorporating expert demonstration data significantly reduced collision rates by 81.04% and increased human likeness by 50% compared to a baseline LLM-based agent. Our study provides insights into using natural language-based human demonstration data for embodied tasks. The driving-thinking dataset is available at url{https://github.com/AIR-DISCOVER/Driving-Thinking-Dataset}.
Read more7/23/2024

0
Large Language Models for Human-like Autonomous Driving: A Survey
Yun Li, Kai Katsumata, Ehsan Javanmardi, Manabu Tsukada
Large Language Models (LLMs), AI models trained on massive text corpora with remarkable language understanding and generation capabilities, are transforming the field of Autonomous Driving (AD). As AD systems evolve from rule-based and optimization-based methods to learning-based techniques like deep reinforcement learning, they are now poised to embrace a third and more advanced category: knowledge-based AD empowered by LLMs. This shift promises to bring AD closer to human-like AD. However, integrating LLMs into AD systems poses challenges in real-time inference, safety assurance, and deployment costs. This survey provides a comprehensive and critical review of recent progress in leveraging LLMs for AD, focusing on their applications in modular AD pipelines and end-to-end AD systems. We highlight key advancements, identify pressing challenges, and propose promising research directions to bridge the gap between LLMs and AD, thereby facilitating the development of more human-like AD systems. The survey first introduces LLMs' key features and common training schemes, then delves into their applications in modular AD pipelines and end-to-end AD, respectively, followed by discussions on open challenges and future directions. Through this in-depth analysis, we aim to provide insights and inspiration for researchers and practitioners working at the intersection of AI and autonomous vehicles, ultimately contributing to safer, smarter, and more human-centric AD technologies.
Read more7/30/2024