Large Language Models for Human-like Autonomous Driving: A Survey

0

Sign in to get full access
Overview
- Large language models (LLMs) have shown impressive capabilities in various tasks, including natural language processing, generation, and reasoning.
- The paper surveys the use of LLMs for human-like autonomous driving, exploring how these models can be leveraged to enable more natural and versatile decision-making in self-driving cars.
- Key topics covered include the potential of LLMs for autonomous driving, the current state of the art, and the technical challenges and open research questions in this domain.
Plain English Explanation
Large language models are artificial intelligence systems that have been trained on vast amounts of text data to understand and generate human-like language. Researchers are exploring how these powerful models can be used to create more human-like autonomous driving systems.
The idea is that by incorporating LLMs, self-driving cars could make decisions in a more natural, flexible, and versatile way, mimicking the decision-making process of human drivers. This could lead to autonomous vehicles that are better able to navigate complex driving scenarios and interact more seamlessly with other human drivers on the road.
The paper provides an overview of the current state of research in this area, highlighting the potential benefits and technical challenges involved. For example, LLMs could help autonomous cars better understand the context and intentions of other drivers, which could lead to more appropriate and safer responses. However, integrating these large, complex models into the real-time, safety-critical systems of self-driving cars also presents significant engineering hurdles.
Technical Explanation
The paper begins by exploring the potential of large language models for autonomous driving. LLMs have shown impressive capabilities in tasks like natural language processing, generation, and reasoning, which could translate to benefits for autonomous driving, such as better understanding of driving context, more natural decision-making, and improved interaction with human drivers.
The authors then review the current state of the art in using LLMs for autonomous agents, including multimodal LLMs that can process and integrate visual, textual, and other sensory inputs. These models have been applied to tasks like scene understanding, planning, and [decision-making] in the context of autonomous driving.
The paper also discusses the technical challenges involved in effectively incorporating LLMs into autonomous driving systems. These include issues like model size, computational requirements, safety and robustness, and the need for specialized training and fine-tuning to adapt the models to the driving domain.
Critical Analysis
The paper provides a thorough and well-researched overview of the potential for using large language models in autonomous driving. However, it also acknowledges several important caveats and limitations that will need to be addressed.
One key challenge is the computational and memory requirements of large language models, which may make them difficult to integrate into the real-time, safety-critical systems of self-driving cars. The authors note that specialized techniques for model compression, acceleration, and deployment will be necessary.
Additionally, the paper highlights the need for extensive training and fine-tuning of LLMs to ensure they can handle the unique demands and nuances of the driving environment. Transferring these models from general language tasks to the specific context of autonomous driving is not a trivial process.
The authors also raise concerns about the safety and robustness of LLM-based autonomous agents, particularly when it comes to handling edge cases, mitigating biases, and ensuring predictable and reliable behavior. Rigorous testing and validation will be crucial before these systems can be deployed in the real world.
Conclusion
In summary, this paper provides a comprehensive survey of the potential for using large language models to enable more human-like autonomous driving. The authors make a compelling case for the benefits of LLMs, such as improved context understanding, more natural decision-making, and better interaction with human drivers.
However, the technical challenges involved in effectively integrating these powerful but complex models into the safety-critical systems of self-driving cars are significant and will require substantial research and engineering efforts. Addressing issues like computational requirements, safety, and robustness will be critical to realizing the full potential of LLMs for autonomous driving.
Overall, this paper offers a valuable overview of a promising research direction that could lead to significant advancements in the field of autonomous vehicles, ultimately improving safety, efficiency, and the driving experience for everyone on the road.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Large Language Models for Human-like Autonomous Driving: A Survey
Yun Li, Kai Katsumata, Ehsan Javanmardi, Manabu Tsukada
Large Language Models (LLMs), AI models trained on massive text corpora with remarkable language understanding and generation capabilities, are transforming the field of Autonomous Driving (AD). As AD systems evolve from rule-based and optimization-based methods to learning-based techniques like deep reinforcement learning, they are now poised to embrace a third and more advanced category: knowledge-based AD empowered by LLMs. This shift promises to bring AD closer to human-like AD. However, integrating LLMs into AD systems poses challenges in real-time inference, safety assurance, and deployment costs. This survey provides a comprehensive and critical review of recent progress in leveraging LLMs for AD, focusing on their applications in modular AD pipelines and end-to-end AD systems. We highlight key advancements, identify pressing challenges, and propose promising research directions to bridge the gap between LLMs and AD, thereby facilitating the development of more human-like AD systems. The survey first introduces LLMs' key features and common training schemes, then delves into their applications in modular AD pipelines and end-to-end AD, respectively, followed by discussions on open challenges and future directions. Through this in-depth analysis, we aim to provide insights and inspiration for researchers and practitioners working at the intersection of AI and autonomous vehicles, ultimately contributing to safer, smarter, and more human-centric AD technologies.
Read more7/30/2024
💬
0
LLM4Drive: A Survey of Large Language Models for Autonomous Driving
Zhenjie Yang, Xiaosong Jia, Hongyang Li, Junchi Yan
Autonomous driving technology, a catalyst for revolutionizing transportation and urban mobility, has the tend to transition from rule-based systems to data-driven strategies. Traditional module-based systems are constrained by cumulative errors among cascaded modules and inflexible pre-set rules. In contrast, end-to-end autonomous driving systems have the potential to avoid error accumulation due to their fully data-driven training process, although they often lack transparency due to their black box nature, complicating the validation and traceability of decisions. Recently, large language models (LLMs) have demonstrated abilities including understanding context, logical reasoning, and generating answers. A natural thought is to utilize these abilities to empower autonomous driving. By combining LLM with foundation vision models, it could open the door to open-world understanding, reasoning, and few-shot learning, which current autonomous driving systems are lacking. In this paper, we systematically review a research line about textit{Large Language Models for Autonomous Driving (LLM4AD)}. This study evaluates the current state of technological advancements, distinctly outlining the principal challenges and prospective directions for the field. For the convenience of researchers in academia and industry, we provide real-time updates on the latest advances in the field as well as relevant open-source resources via the designated link: https://github.com/Thinklab-SJTU/Awesome-LLM4AD.
Read more8/13/2024
💬
0
A Survey on Large Language Model based Autonomous Agents
Lei Wang, Chen Ma, Xueyang Feng, Zeyu Zhang, Hao Yang, Jingsen Zhang, Zhiyuan Chen, Jiakai Tang, Xu Chen, Yankai Lin, Wayne Xin Zhao, Zhewei Wei, Ji-Rong Wen
Autonomous agents have long been a prominent research focus in both academic and industry communities. Previous research in this field often focuses on training agents with limited knowledge within isolated environments, which diverges significantly from human learning processes, and thus makes the agents hard to achieve human-like decisions. Recently, through the acquisition of vast amounts of web knowledge, large language models (LLMs) have demonstrated remarkable potential in achieving human-level intelligence. This has sparked an upsurge in studies investigating LLM-based autonomous agents. In this paper, we present a comprehensive survey of these studies, delivering a systematic review of the field of LLM-based autonomous agents from a holistic perspective. More specifically, we first discuss the construction of LLM-based autonomous agents, for which we propose a unified framework that encompasses a majority of the previous work. Then, we present a comprehensive overview of the diverse applications of LLM-based autonomous agents in the fields of social science, natural science, and engineering. Finally, we delve into the evaluation strategies commonly used for LLM-based autonomous agents. Based on the previous studies, we also present several challenges and future directions in this field. To keep track of this field and continuously update our survey, we maintain a repository of relevant references at https://github.com/Paitesanshi/LLM-Agent-Survey.
Read more4/5/2024
0
In-context Learning for Automated Driving Scenarios
Ziqi Zhou, Jingyue Zhang, Jingyuan Zhang, Boyue Wang, Tianyu Shi, Alaa Khamis
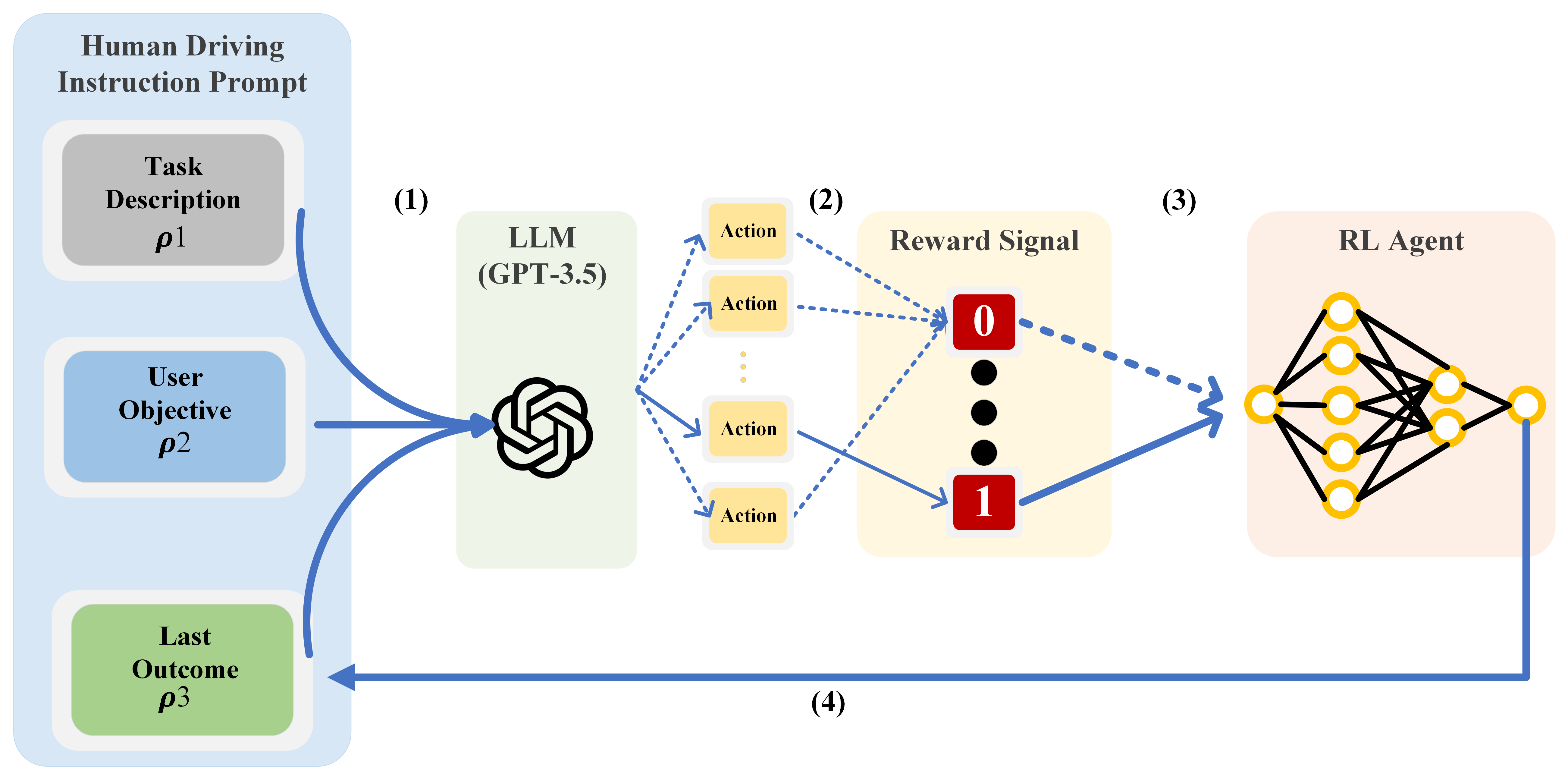
One of the key challenges in current Reinforcement Learning (RL)-based Automated Driving (AD) agents is achieving flexible, precise, and human-like behavior cost-effectively. This paper introduces an innovative approach utilizing Large Language Models (LLMs) to intuitively and effectively optimize RL reward functions in a human-centric way. We developed a framework where instructions and dynamic environment descriptions are input into the LLM. The LLM then utilizes this information to assist in generating rewards, thereby steering the behavior of RL agents towards patterns that more closely resemble human driving. The experimental results demonstrate that this approach not only makes RL agents more anthropomorphic but also reaches better performance. Additionally, various strategies for reward-proxy and reward-shaping are investigated, revealing the significant impact of prompt design on shaping an AD vehicle's behavior. These findings offer a promising direction for the development of more advanced and human-like automated driving systems. Our experimental data and source code can be found here.
Read more5/8/2024