Language-Conditioned Imitation Learning with Base Skill Priors under Unstructured Data

0
📊
Sign in to get full access
Overview
- The paper explores a language-conditioned approach to robot manipulation that aims to enable robots to interpret language commands and interact with objects accordingly.
- The proposed approach combines base skill priors and imitation learning to enhance the algorithm's ability to adapt to unfamiliar environments.
- The model is evaluated in both simulated and real-world settings, demonstrating strong generalization capabilities.
Plain English Explanation
The researchers have developed a new way to program robots so they can better understand and carry out complex tasks based on language instructions. Traditionally, language-based robot control systems have struggled to adapt to new or unfamiliar environments. To address this, the researchers combined two key approaches:
- Base Skill Priors: The robot starts with a basic set of skills or "priors" that provide a foundation for understanding and executing tasks.
- Imitation Learning: The robot learns additional skills by observing and imitating human demonstrations, especially in unstructured or unpredictable environments.
By blending these two components, the researchers created a system that can more easily adapt to new situations and carry out a wider range of language-based commands. The system was tested in both simulated and real-world environments, showing significant improvements over previous state-of-the-art methods.
The key benefit of this approach is that it allows robots to be more flexible and capable of handling diverse tasks and environments, beyond what was possible with earlier language-based control systems. This could pave the way for robots that can better understand and follow natural language instructions, bringing us closer to seamless human-robot collaboration.
Technical Explanation
The paper proposes a general-purpose, language-conditioned approach that combines base skill priors and imitation learning to enhance the algorithm's ability to adapt to unfamiliar environments.
The researchers first establish a set of base skill priors, which provide the robot with a foundational understanding of basic manipulation skills. These priors serve as a starting point for the robot to interpret and execute language commands.
To further enhance the robot's capabilities, the researchers employ imitation learning techniques. By observing and imitating human demonstrations, especially in unstructured data, the robot can learn additional skills and strategies for manipulating objects in novel situations.
The performance of the proposed approach is evaluated in both simulated and real-world environments using a zero-shot setting. In the simulated environment, the model surpasses previously reported scores for the CALVIN benchmark, particularly in the challenging Zero-Shot Multi-Environment setting. The average completed task length, which indicates the average number of tasks the agent can continuously complete, improves by more than 2.5 times compared to the state-of-the-art method HULC.
Additionally, the researchers conduct a zero-shot evaluation of their policy in a real-world setting, without any additional specific adaptations. In this evaluation, they set up ten tasks and achieve an average 30% improvement compared to the current state-of-the-art approach, demonstrating a high generalization capability in both simulated environments and the real world.
Critical Analysis
The paper presents a promising approach to enhancing the adaptability and generalization of language-conditioned robot manipulation. The combination of base skill priors and imitation learning appears to be an effective strategy for addressing the limitations of previous language-based control systems.
However, the paper does not provide a comprehensive analysis of the potential limitations or caveats of the proposed approach. For example, it would be valuable to understand the specific types of unfamiliar environments or tasks where the system may struggle, or any potential biases or assumptions in the training data that could affect the model's performance.
Additionally, the paper focuses primarily on the technical aspects of the approach and its evaluation, but it would be helpful to see a more in-depth discussion of the broader implications and potential applications of this technology. How might this research contribute to the development of more capable and versatile robots that can better assist humans in a variety of real-world scenarios?
Overall, the paper presents a significant advancement in the field of language-conditioned robot manipulation, but there may be opportunities to expand the critical analysis and explore the wider impact of this work.
Conclusion
This study proposes a novel, general-purpose approach to language-conditioned robot manipulation that combines base skill priors and imitation learning. The model's impressive performance in both simulated and real-world environments, particularly in adapting to unfamiliar settings, demonstrates the potential of this approach to enable more flexible and capable robots that can better understand and execute complex language-based tasks.
By bridging the gap between language understanding and physical manipulation, this research represents an important step towards enhancing the collaboration between humans and robots, with applications in a wide range of industries and domains. As the field of language-conditioned robotics continues to evolve, this work provides valuable insights and a promising direction for further development and exploration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📊
0
Language-Conditioned Imitation Learning with Base Skill Priors under Unstructured Data
Hongkuan Zhou, Zhenshan Bing, Xiangtong Yao, Xiaojie Su, Chenguang Yang, Kai Huang, Alois Knoll
The growing interest in language-conditioned robot manipulation aims to develop robots capable of understanding and executing complex tasks, with the objective of enabling robots to interpret language commands and manipulate objects accordingly. While language-conditioned approaches demonstrate impressive capabilities for addressing tasks in familiar environments, they encounter limitations in adapting to unfamiliar environment settings. In this study, we propose a general-purpose, language-conditioned approach that combines base skill priors and imitation learning under unstructured data to enhance the algorithm's generalization in adapting to unfamiliar environments. We assess our model's performance in both simulated and real-world environments using a zero-shot setting. In the simulated environment, the proposed approach surpasses previously reported scores for CALVIN benchmark, especially in the challenging Zero-Shot Multi-Environment setting. The average completed task length, indicating the average number of tasks the agent can continuously complete, improves more than 2.5 times compared to the state-of-the-art method HULC. In addition, we conduct a zero-shot evaluation of our policy in a real-world setting, following training exclusively in simulated environments without additional specific adaptations. In this evaluation, we set up ten tasks and achieved an average 30% improvement in our approach compared to the current state-of-the-art approach, demonstrating a high generalization capability in both simulated environments and the real world. For further details, including access to our code and videos, please refer to https://hk-zh.github.io/spil/
Read more9/14/2024

0
Uncertainty-Aware Deployment of Pre-trained Language-Conditioned Imitation Learning Policies
Bo Wu, Bruce D. Lee, Kostas Daniilidis, Bernadette Bucher, Nikolai Matni
Large-scale robotic policies trained on data from diverse tasks and robotic platforms hold great promise for enabling general-purpose robots; however, reliable generalization to new environment conditions remains a major challenge. Toward addressing this challenge, we propose a novel approach for uncertainty-aware deployment of pre-trained language-conditioned imitation learning agents. Specifically, we use temperature scaling to calibrate these models and exploit the calibrated model to make uncertainty-aware decisions by aggregating the local information of candidate actions. We implement our approach in simulation using three such pre-trained models, and showcase its potential to significantly enhance task completion rates. The accompanying code is accessible at the link: https://github.com/BobWu1998/uncertainty_quant_all.git
Read more7/30/2024
0
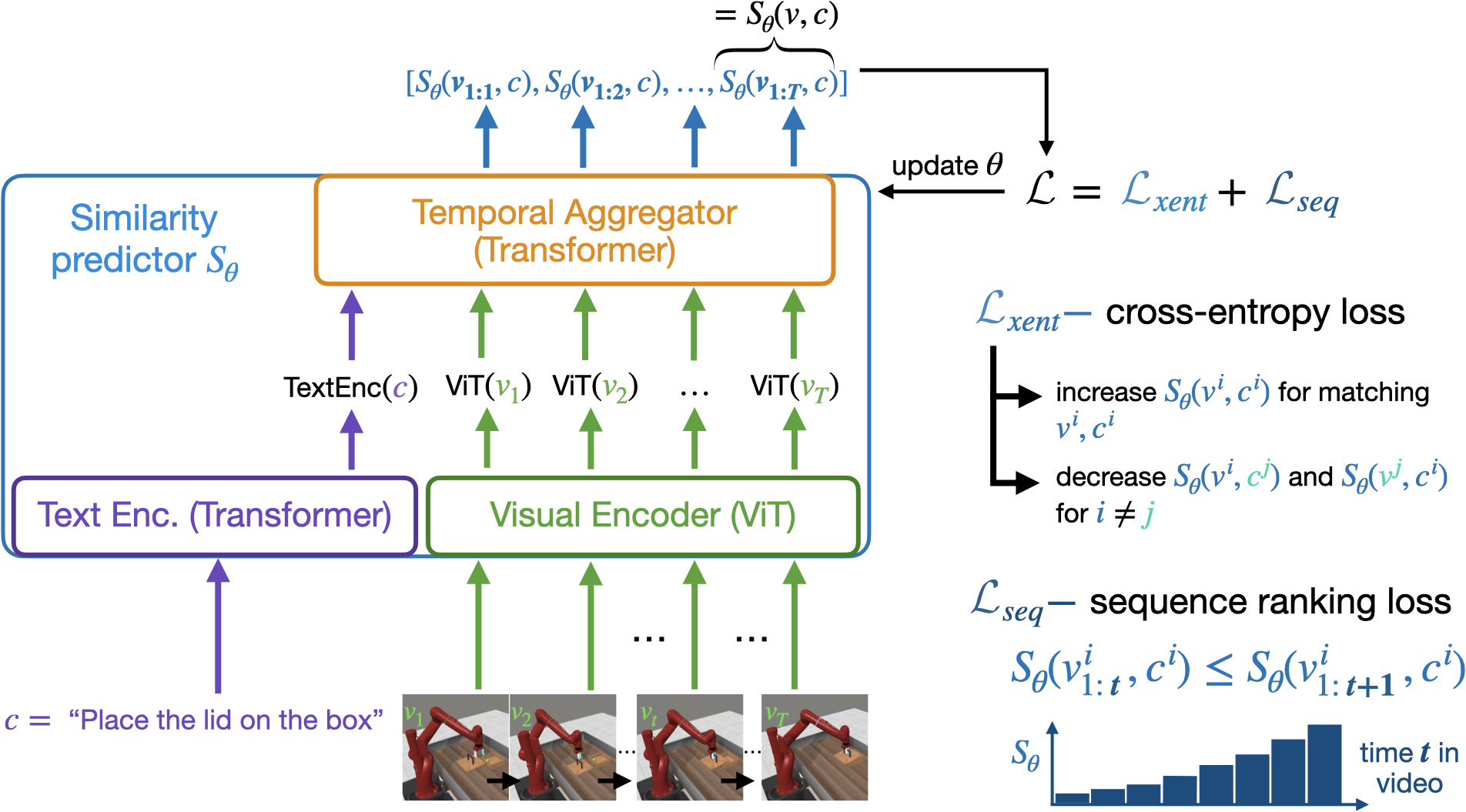
Video-Language Critic: Transferable Reward Functions for Language-Conditioned Robotics
Minttu Alakuijala, Reginald McLean, Isaac Woungang, Nariman Farsad, Samuel Kaski, Pekka Marttinen, Kai Yuan
Natural language is often the easiest and most convenient modality for humans to specify tasks for robots. However, learning to ground language to behavior typically requires impractical amounts of diverse, language-annotated demonstrations collected on each target robot. In this work, we aim to separate the problem of what to accomplish from how to accomplish it, as the former can benefit from substantial amounts of external observation-only data, and only the latter depends on a specific robot embodiment. To this end, we propose Video-Language Critic, a reward model that can be trained on readily available cross-embodiment data using contrastive learning and a temporal ranking objective, and use it to score behavior traces from a separate reinforcement learning actor. When trained on Open X-Embodiment data, our reward model enables 2x more sample-efficient policy training on Meta-World tasks than a sparse reward only, despite a significant domain gap. Using in-domain data but in a challenging task generalization setting on Meta-World, we further demonstrate more sample-efficient training than is possible with prior language-conditioned reward models that are either trained with binary classification, use static images, or do not leverage the temporal information present in video data.
Read more5/31/2024

0
Contrastive Imitation Learning for Language-guided Multi-Task Robotic Manipulation
Teli Ma, Jiaming Zhou, Zifan Wang, Ronghe Qiu, Junwei Liang
Developing robots capable of executing various manipulation tasks, guided by natural language instructions and visual observations of intricate real-world environments, remains a significant challenge in robotics. Such robot agents need to understand linguistic commands and distinguish between the requirements of different tasks. In this work, we present Sigma-Agent, an end-to-end imitation learning agent for multi-task robotic manipulation. Sigma-Agent incorporates contrastive Imitation Learning (contrastive IL) modules to strengthen vision-language and current-future representations. An effective and efficient multi-view querying Transformer (MVQ-Former) for aggregating representative semantic information is introduced. Sigma-Agent shows substantial improvement over state-of-the-art methods under diverse settings in 18 RLBench tasks, surpassing RVT by an average of 5.2% and 5.9% in 10 and 100 demonstration training, respectively. Sigma-Agent also achieves 62% success rate with a single policy in 5 real-world manipulation tasks. The code will be released upon acceptance.
Read more6/17/2024