Language, Environment, and Robotic Navigation
2404.03049
0
0
👨🏫
Abstract
This paper explores the integration of linguistic inputs within robotic navigation systems, drawing upon the symbol interdependency hypothesis to bridge the divide between symbolic and embodied cognition. It examines previous work incorporating language and semantics into Neural Network (NN) and Simultaneous Localization and Mapping (SLAM) approaches, highlighting how these integrations have advanced the field. By contrasting abstract symbol manipulation with sensory-motor grounding, we propose a unified framework where language functions both as an abstract communicative system and as a grounded representation of perceptual experiences. Our review of cognitive models of distributional semantics and their application to autonomous agents underscores the transformative potential of language-integrated systems.
Create account to get full access
Overview
• This paper explores how language can be incorporated into robotic navigation systems to improve their performance and flexibility.
• The researchers investigate using natural language processing techniques to allow robots to understand and follow verbal instructions, as well as to describe their environment and actions.
• The paper also discusses how a robot's understanding of its surroundings, based on sensor data, can be used to ground the meaning of language and enable more natural communication.
Plain English Explanation
Robots today are often very good at navigating through environments and accomplishing tasks, but they typically rely on pre-programmed instructions or sensor data alone. This paper explores ways to make robot navigation more flexible and adaptable by incorporating language understanding.
The key idea is to enable robots to interpret and follow verbal instructions from humans, rather than just blindly executing pre-set commands. For example, a robot could be told "Go to the kitchen, then bring me the red cup on the counter." This allows the robot to understand the goal and context, rather than just receiving step-by-step directions.
Conversely, the paper also looks at how a robot's awareness of its surroundings, built up from sensor data, can inform its use of language. For instance, a robot exploring a room could describe what it sees, like "There is a table in the center of the room, with a laptop and some books on it." This grounding in the physical environment makes the robot's language more meaningful and natural.
Overall, the goal is to create robotic systems that can engage in more natural, context-aware communication with humans, leading to more intuitive and flexible robot behavior.
Technical Explanation
The paper proposes an architecture that integrates language understanding, spatial reasoning, and robot control to enable more natural robotic navigation.
The language understanding module uses natural language processing techniques to parse human instructions and extract the relevant semantics, like location references, object descriptions, and action goals. This allows the robot to comprehend the intent behind the language, rather than just treating it as a sequence of commands.
The spatial reasoning component builds an internal representation of the robot's environment based on sensor data from cameras, LIDAR, etc. This spatial model grounds the meaning of language by associating linguistic concepts (e.g. "kitchen", "red cup") with the robot's perceptual understanding of its surroundings.
The robot control system then uses this combined understanding of language and environment to plan and execute navigation actions that fulfill the human's instructions. For example, it can identify the target location, locate the desired object, and determine the appropriate sequence of movements to carry out the task.
The researchers evaluate their approach through a series of simulated and real-world experiments, demonstrating improvements in task completion rates and human-robot communication compared to traditional robotic navigation systems.
Critical Analysis
The paper provides a compelling vision for how language can be seamlessly integrated into robotic navigation, enabling more intuitive and flexible control. The proposed architecture seems well-designed, with clear connections between the language, spatial, and control components.
However, the evaluation is limited to relatively simple scenarios, and it's unclear how well the approach would scale to more complex, real-world environments with significant clutter, occlusions, and ambiguity. Handling more nuanced, context-dependent language, as well as dealing with errors or misunderstandings, are also important challenges that require further exploration.
Additionally, the paper does not discuss potential safety or ethical concerns that may arise as robots become more adept at interpreting and following human instructions. There could be scenarios where a robot misunderstands a command with serious consequences, or where a human inadvertently gives an instruction that leads to unintended behavior. Addressing these issues will be crucial as this technology advances.
Overall, the research represents an important step towards more natural and effective human-robot interaction, but there is still significant work to be done to realize the full potential of language-enabled robotic navigation.
Conclusion
This paper presents a novel approach to integrating language understanding and spatial reasoning into robotic navigation systems. By enabling robots to interpret and follow verbal instructions, as well as describe their environment using natural language, the researchers aim to create more intuitive and flexible robot behavior.
The proposed architecture shows promise in improving task completion rates and communication during robotic navigation, as demonstrated through simulation and real-world experiments. However, the research also highlights the need to address significant challenges, such as scaling to complex environments, handling ambiguous or context-dependent language, and ensuring safety and ethical considerations.
As robots become increasingly capable of understanding and interacting with humans through language, this work represents an important step towards a future where robots and people can collaborate more seamlessly and effectively. Further advancements in this area could have far-reaching implications for a wide range of applications, from home assistants to industrial automation to disaster response.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
A Survey of Language-Based Communication in Robotics
William Hunt, Sarvapali D. Ramchurn, Mohammad D. Soorati
0
0
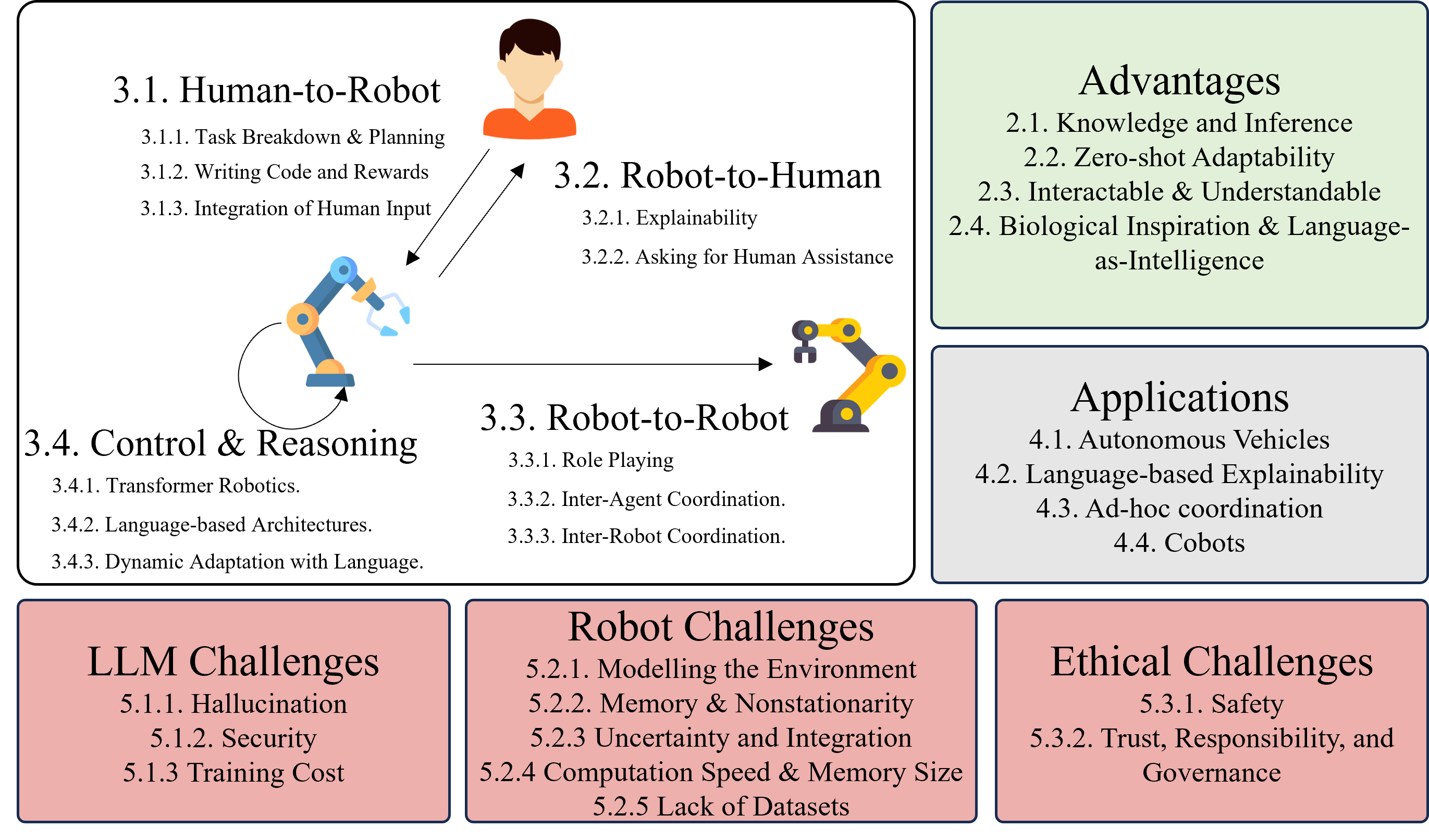
Embodied robots which can interact with their environment and neighbours are increasingly being used as a test case to develop Artificial Intelligence. This creates a need for multimodal robot controllers which can operate across different types of information including text. Large Language Models are able to process and generate textual as well as audiovisual data and, more recently, robot actions. Language Models are increasingly being applied to robotic systems; these Language-Based robots leverage the power of language models in a variety of ways. Additionally, the use of language opens up multiple forms of information exchange between members of a human-robot team. This survey motivates the use of language models in robotics, and then delineates works based on the part of the overall control flow in which language is incorporated. Language can be used by human to task a robot, by a robot to inform a human, between robots as a human-like communication medium, and internally for a robot's planning and control. Applications of language-based robots are explored, and finally numerous limitations and challenges are discussed to provide a summary of the development needed for language-based robotics moving forward. Links to each paper and, if available, source code are made available in the accompanying site at https://uos-haris.online/sooratilab/papers/WillSurvey/LangRobotSurvey.php
6/7/2024
💬
A Survey of Robotic Language Grounding: Tradeoffs Between Symbols and Embeddings
Vanya Cohen, Jason Xinyu Liu, Raymond Mooney, Stefanie Tellex, David Watkins
0
0
With large language models, robots can understand language more flexibly and more capable than ever before. This survey reviews and situates recent literature into a spectrum with two poles: 1) mapping between language and some manually defined formal representation of meaning, and 2) mapping between language and high-dimensional vector spaces that translate directly to low-level robot policy. Using a formal representation allows the meaning of the language to be precisely represented, limits the size of the learning problem, and leads to a framework for interpretability and formal safety guarantees. Methods that embed language and perceptual data into high-dimensional spaces avoid this manually specified symbolic structure and thus have the potential to be more general when fed enough data but require more data and computing to train. We discuss the benefits and tradeoffs of each approach and finish by providing directions for future work that achieves the best of both worlds.
6/26/2024
Enhancing Robot Explanation Capabilities through Vision-Language Models: a Preliminary Study by Interpreting Visual Inputs for Improved Human-Robot Interaction
David Sobr'in-Hidalgo, Miguel 'Angel Gonz'alez-Santamarta, 'Angel Manuel Guerrero-Higueras, Francisco Javier Rodr'iguez-Lera, Vicente Matell'an-Olivera
0
0
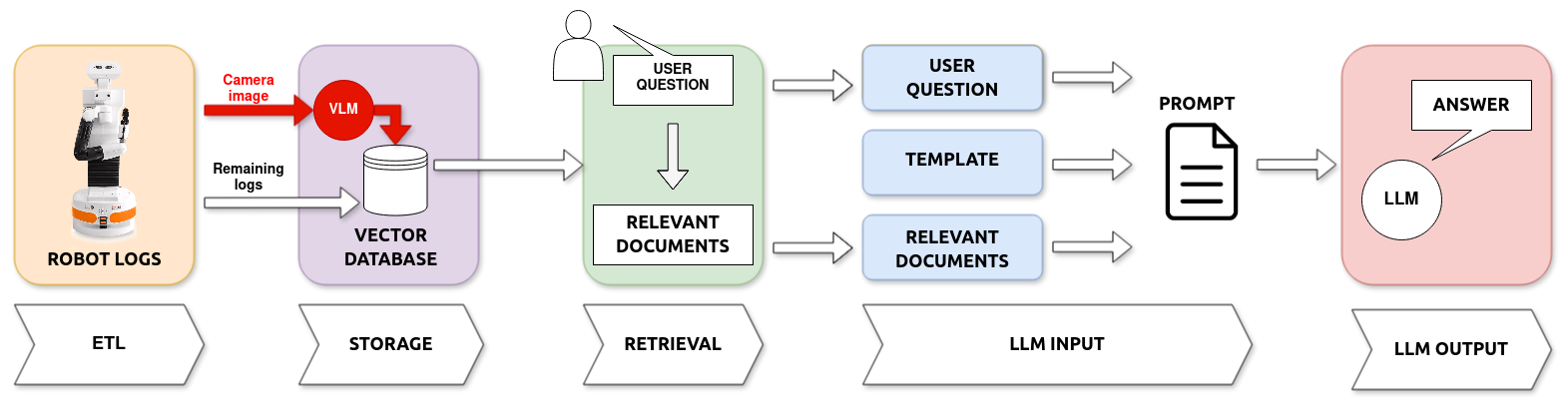
This paper presents an improved system based on our prior work, designed to create explanations for autonomous robot actions during Human-Robot Interaction (HRI). Previously, we developed a system that used Large Language Models (LLMs) to interpret logs and produce natural language explanations. In this study, we expand our approach by incorporating Vision-Language Models (VLMs), enabling the system to analyze textual logs with the added context of visual input. This method allows for generating explanations that combine data from the robot's logs and the images it captures. We tested this enhanced system on a basic navigation task where the robot needs to avoid a human obstacle. The findings from this preliminary study indicate that adding visual interpretation improves our system's explanations by precisely identifying obstacles and increasing the accuracy of the explanations provided.
4/16/2024
🔄
Embodied Agents for Efficient Exploration and Smart Scene Description
Roberto Bigazzi, Marcella Cornia, Silvia Cascianelli, Lorenzo Baraldi, Rita Cucchiara
0
0
The development of embodied agents that can communicate with humans in natural language has gained increasing interest over the last years, as it facilitates the diffusion of robotic platforms in human-populated environments. As a step towards this objective, in this work, we tackle a setting for visual navigation in which an autonomous agent needs to explore and map an unseen indoor environment while portraying interesting scenes with natural language descriptions. To this end, we propose and evaluate an approach that combines recent advances in visual robotic exploration and image captioning on images generated through agent-environment interaction. Our approach can generate smart scene descriptions that maximize semantic knowledge of the environment and avoid repetitions. Further, such descriptions offer user-understandable insights into the robot's representation of the environment by highlighting the prominent objects and the correlation between them as encountered during the exploration. To quantitatively assess the performance of the proposed approach, we also devise a specific score that takes into account both exploration and description skills. The experiments carried out on both photorealistic simulated environments and real-world ones demonstrate that our approach can effectively describe the robot's point of view during exploration, improving the human-friendly interpretability of its observations.
4/16/2024