Language Guided Skill Discovery
2406.06615
0
0
Abstract
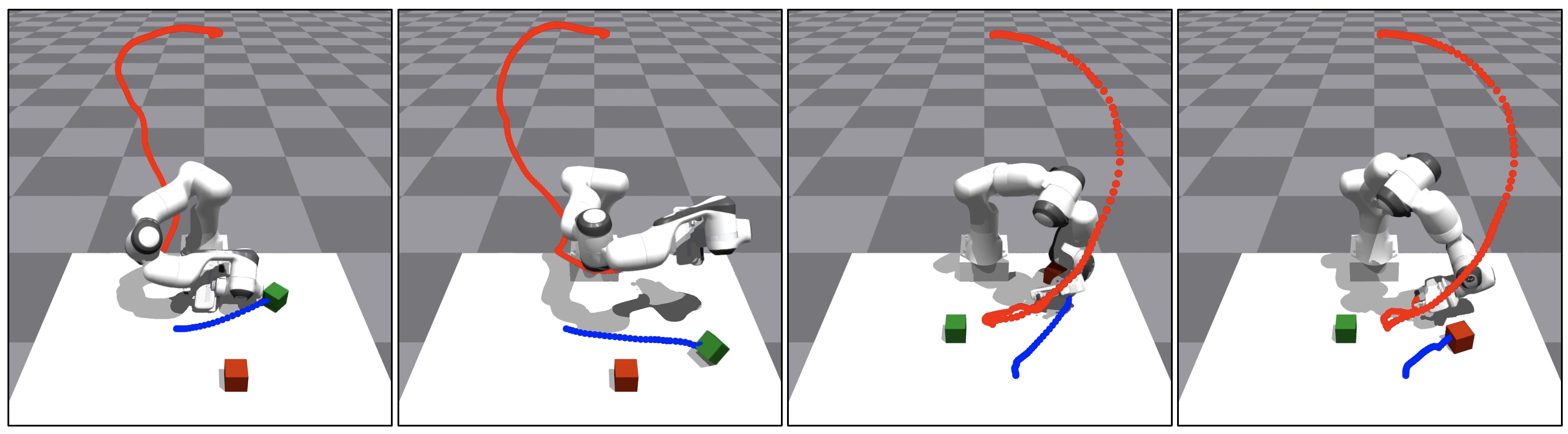
Skill discovery methods enable agents to learn diverse emergent behaviors without explicit rewards. To make learned skills useful for unknown downstream tasks, obtaining a semantically diverse repertoire of skills is essential. While some approaches introduce a discriminator to distinguish skills and others aim to increase state coverage, no existing work directly addresses the semantic diversity of skills. We hypothesize that leveraging the semantic knowledge of large language models (LLMs) can lead us to improve semantic diversity of resulting behaviors. In this sense, we introduce Language Guided Skill Discovery (LGSD), a skill discovery framework that aims to directly maximize the semantic diversity between skills. LGSD takes user prompts as input and outputs a set of semantically distinctive skills. The prompts serve as a means to constrain the search space into a semantically desired subspace, and the generated LLM outputs guide the agent to visit semantically diverse states within the subspace. We demonstrate that LGSD enables legged robots to visit different user-intended areas on a plane by simply changing the prompt. Furthermore, we show that language guidance aids in discovering more diverse skills compared to five existing skill discovery methods in robot-arm manipulation environments. Lastly, LGSD provides a simple way of utilizing learned skills via natural language.
Create account to get full access
Overview
- This paper introduces a novel approach called "Language Guided Skill Discovery" for enabling agents to learn a diverse set of skills from language-based task descriptions.
- The key idea is to leverage language as a guide to discover a wide range of skills that can be useful for accomplishing different types of tasks.
- The method combines deep reinforcement learning with variational inference to learn a diverse set of skills in an unsupervised manner, while aligning them with the semantics provided by the language descriptions.
Plain English Explanation
The researchers developed a new way for AI agents to learn different skills by using language as a guide. Instead of just trying to learn skills randomly, the agent uses the information provided in language descriptions to figure out what kinds of skills it should try to learn.
The agent uses a combination of deep reinforcement learning, which is a type of machine learning where the agent learns by trial and error, and variational inference, which is a technique for modeling complex probability distributions. This allows the agent to discover a wide variety of useful skills in an unsupervised way, meaning the agent figures out the skills on its own without being explicitly told what to learn.
The key advantage of this approach is that the language descriptions help the agent learn skills that are actually relevant and meaningful, rather than just random skills that may or may not be useful. This makes the overall learning process more efficient and aligned with the agent's goals.
For example, if the language description talks about "opening a door" or "picking up an object," the agent can use that information to guide its exploration and try to learn the specific skills needed to accomplish those tasks, rather than just learning random actions. [Link to https://aimodels.fyi/papers/arxiv/language-guided-skill-learning-temporal-variational-inference]
Technical Explanation
The authors propose a "Language Guided Skill Discovery" (LGSD) framework that combines deep reinforcement learning with variational inference to allow an agent to discover a diverse set of skills that are aligned with language-based task descriptions.
The core idea is to learn a generative model that can associate language descriptions with the corresponding skills required to accomplish the described tasks. The authors use a temporal variational autoencoder (TVAE) architecture to model the joint distribution of the agent's observation, action, and language description.
During training, the TVAE is used to infer a diverse set of skills in an unsupervised manner by maximizing the evidence lower bound (ELBO) of the model. Crucially, the language description is used as a guide to shape the skill discovery process, encouraging the agent to learn skills that are semantically meaningful and relevant to the given tasks.
The authors evaluate their approach on a suite of simulated environments and show that LGSD outperforms prior methods in terms of both the quality and diversity of the discovered skills. [Link to https://aimodels.fyi/papers/arxiv/agentic-skill-discovery, https://aimodels.fyi/papers/arxiv/balancing-both-behavioral-quality-diversity-unsupervised-skill, https://aimodels.fyi/papers/arxiv/variational-offline-multi-agent-skill-discovery]
Critical Analysis
The authors provide a thoughtful discussion of the limitations and potential issues with their approach. One key concern is the reliance on language descriptions, which may not always be available or accurately capture the full complexity of real-world tasks.
Additionally, the authors note that their method assumes the language descriptions are semantically meaningful and provide a useful signal for skill discovery. In practice, this may not always be the case, and the approach may struggle with ambiguous or misleading language inputs.
Furthermore, the authors acknowledge that their evaluation is limited to simulated environments, and it remains to be seen how well the LGSD framework would scale and perform in more complex, real-world settings. [Link to https://aimodels.fyi/papers/arxiv/semantically-diverse-language-generation-uncertainty-estimation-language]
Conclusion
Overall, the "Language Guided Skill Discovery" framework represents an interesting and promising approach for enabling AI agents to learn a diverse set of skills in a more structured and semantically meaningful way. By leveraging language as a guiding signal, the method can help agents discover skills that are directly relevant to accomplishing a wide range of tasks.
While the approach has some limitations, the authors' careful analysis and discussion of these issues suggest that the LGSD framework could serve as a valuable stepping stone towards more advanced, language-guided skill learning systems. As the field of AI continues to evolve, techniques like this that can bridge the gap between language and skill acquisition will likely become increasingly important.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Agentic Skill Discovery
Xufeng Zhao, Cornelius Weber, Stefan Wermter
0
0
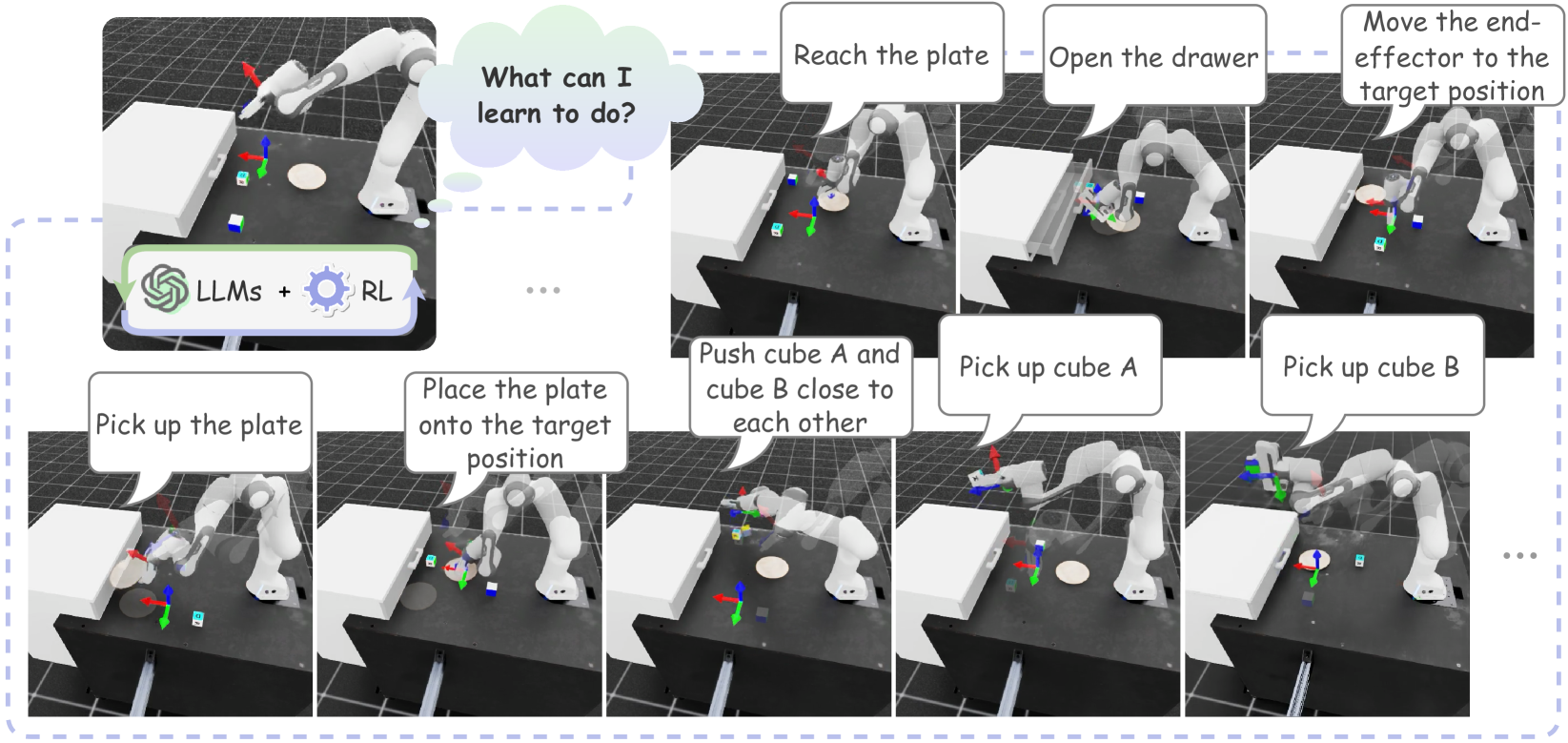
Language-conditioned robotic skills make it possible to apply the high-level reasoning of Large Language Models (LLMs) to low-level robotic control. A remaining challenge is to acquire a diverse set of fundamental skills. Existing approaches either manually decompose a complex task into atomic robotic actions in a top-down fashion, or bootstrap as many combinations as possible in a bottom-up fashion to cover a wider range of task possibilities. These decompositions or combinations, however, require an initial skill library. For example, a grasping capability can never emerge from a skill library containing only diverse pushing skills. Existing skill discovery techniques with reinforcement learning acquire skills by an exhaustive exploration but often yield non-meaningful behaviors. In this study, we introduce a novel framework for skill discovery that is entirely driven by LLMs. The framework begins with an LLM generating task proposals based on the provided scene description and the robot's configurations, aiming to incrementally acquire new skills upon task completion. For each proposed task, a series of reinforcement learning processes are initiated, utilizing reward and success determination functions sampled by the LLM to develop the corresponding policy. The reliability and trustworthiness of learned behaviors are further ensured by an independent vision-language model. We show that starting with zero skill, the ASD skill library emerges and expands to more and more meaningful and reliable skills, enabling the robot to efficiently further propose and complete advanced tasks. The project page can be found at: https://agentic-skill-discovery.github.io.
5/27/2024
Language-guided Skill Learning with Temporal Variational Inference
Haotian Fu, Pratyusha Sharma, Elias Stengel-Eskin, George Konidaris, Nicolas Le Roux, Marc-Alexandre C^ot'e, Xingdi Yuan
0
0
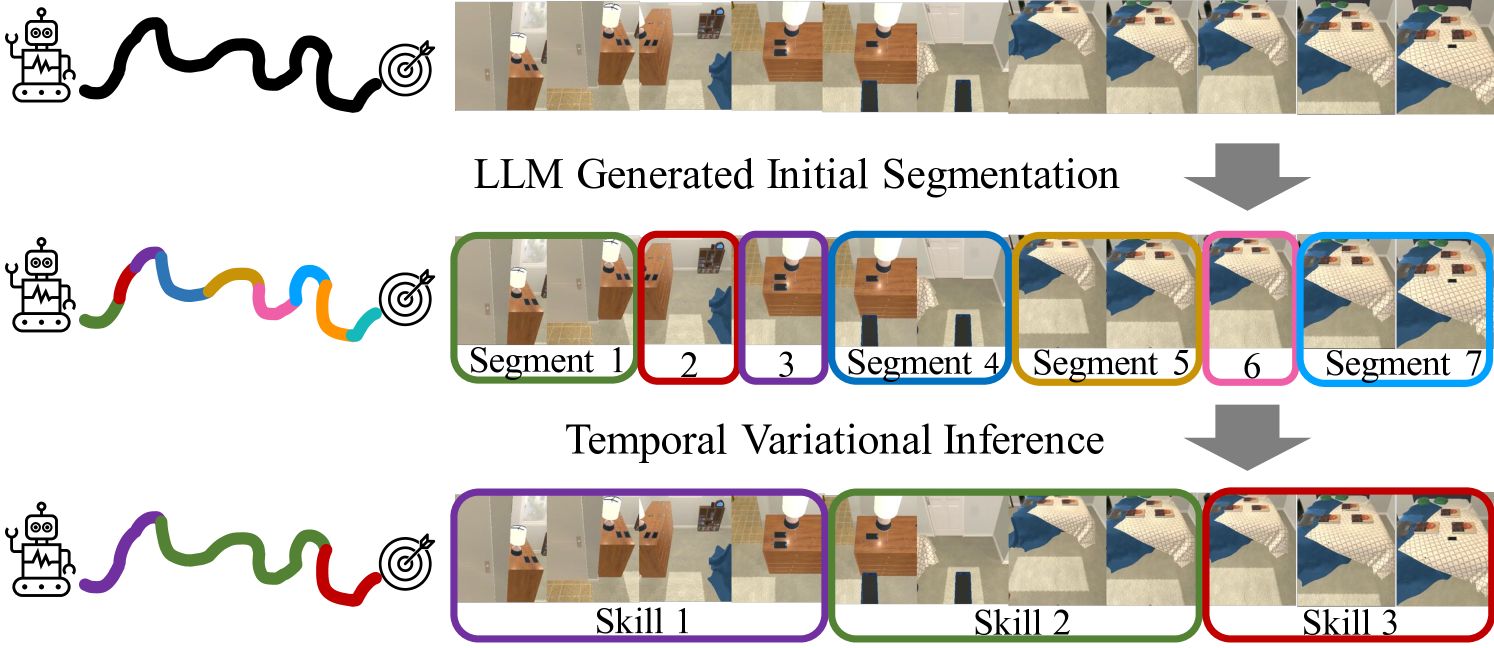
We present an algorithm for skill discovery from expert demonstrations. The algorithm first utilizes Large Language Models (LLMs) to propose an initial segmentation of the trajectories. Following that, a hierarchical variational inference framework incorporates the LLM-generated segmentation information to discover reusable skills by merging trajectory segments. To further control the trade-off between compression and reusability, we introduce a novel auxiliary objective based on the Minimum Description Length principle that helps guide this skill discovery process. Our results demonstrate that agents equipped with our method are able to discover skills that help accelerate learning and outperform baseline skill learning approaches on new long-horizon tasks in BabyAI, a grid world navigation environment, as well as ALFRED, a household simulation environment.
5/28/2024

Balancing Both Behavioral Quality and Diversity in Unsupervised Skill Discovery
Xin Liu, Yaran Chen, Dongbin Zhao
0
0
This work has been submitted to the IEEE for possible publication. Copyright may be transferred without notice, after which this version may no longer be accessible. Unsupervised skill discovery seeks to dig out diverse and exploratory skills without extrinsic reward, with the discovered skills efficiently adapting to multiple downstream tasks in various ways. However, recent advanced methods struggle to well balance behavioral exploration and diversity, particularly when the agent dynamics are complex and potential skills are hard to discern (e.g., robot behavior discovery). In this paper, we propose textbf{Co}ntrastive textbf{m}ulti-objective textbf{S}kill textbf{D}iscovery textbf{(ComSD)} which discovers exploratory and diverse behaviors through a novel intrinsic incentive, named contrastive multi-objective reward. It contains a novel diversity reward based on contrastive learning to effectively drive agents to discern existing skills, and a particle-based exploration reward to access and learn new behaviors. Moreover, a novel dynamic weighting mechanism between the above two rewards is proposed for diversity-exploration balance, which further improves behavioral quality. Extensive experiments and analysis demonstrate that ComSD can generate diverse behaviors at different exploratory levels for complex multi-joint robots, enabling state-of-the-art performance across 32 challenging downstream adaptation tasks, which recent advanced methods cannot. Codes will be opened after publication.
5/21/2024
Variational Offline Multi-agent Skill Discovery
Jiayu Chen, Bhargav Ganguly, Tian Lan, Vaneet Aggarwal
0
0
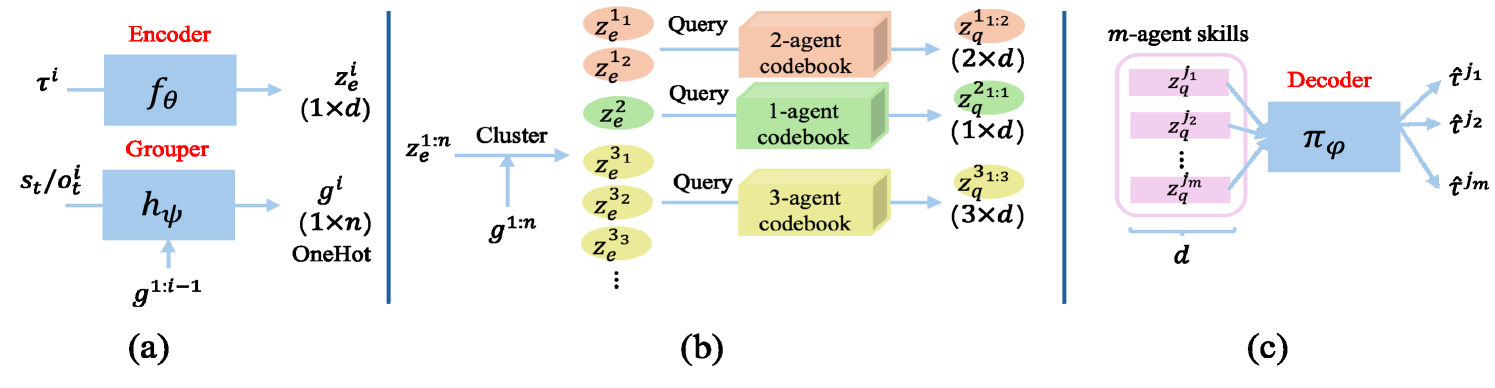
Skills are effective temporal abstractions established for sequential decision making tasks, which enable efficient hierarchical learning for long-horizon tasks and facilitate multi-task learning through their transferability. Despite extensive research, research gaps remain in multi-agent scenarios, particularly for automatically extracting subgroup coordination patterns in a multi-agent task. In this case, we propose two novel auto-encoder schemes: VO-MASD-3D and VO-MASD-Hier, to simultaneously capture subgroup- and temporal-level abstractions and form multi-agent skills, which firstly solves the aforementioned challenge. An essential algorithm component of these schemes is a dynamic grouping function that can automatically detect latent subgroups based on agent interactions in a task. Notably, our method can be applied to offline multi-task data, and the discovered subgroup skills can be transferred across relevant tasks without retraining. Empirical evaluations on StarCraft tasks indicate that our approach significantly outperforms existing methods regarding applying skills in multi-agent reinforcement learning (MARL). Moreover, skills discovered using our method can effectively reduce the learning difficulty in MARL scenarios with delayed and sparse reward signals.
5/28/2024