Variational Offline Multi-agent Skill Discovery

0
Sign in to get full access
Overview
- This paper proposes a novel method for discovering skills in multi-agent offline reinforcement learning (RL) environments.
- The approach, called Variational Offline Multi-agent Skill Discovery (VOMASD), uses a variational inference framework to learn diverse and meaningful skills from offline data.
- VOMASD aims to address the challenge of skill discovery in complex, multi-agent settings where agents must coordinate and learn from limited offline data.
Plain English Explanation
In the field of reinforcement learning (RL), researchers are often interested in teaching AI agents how to perform complex tasks by breaking them down into smaller, more manageable "skills." This is similar to how humans learn - we start with basic building blocks and gradually develop more sophisticated abilities.
The problem is that in real-world, multi-agent environments, where multiple AI agents need to work together, it can be very difficult to discover these useful skills from the limited data available. This is where the technique proposed in this paper, called Variational Offline Multi-agent Skill Discovery (VOMASD), comes in.
VOMASD uses a clever statistical technique called "variational inference" to analyze the available data and automatically find a diverse set of skills that the agents can learn. This allows the agents to develop a rich repertoire of abilities, even when they only have access to a relatively small amount of information about the environment.
The key insight is that by modeling the structure of the skills in a smart way, VOMASD can extract much more useful information from the data than traditional methods. This means the agents can learn to collaborate and solve complex problems more effectively.
Technical Explanation
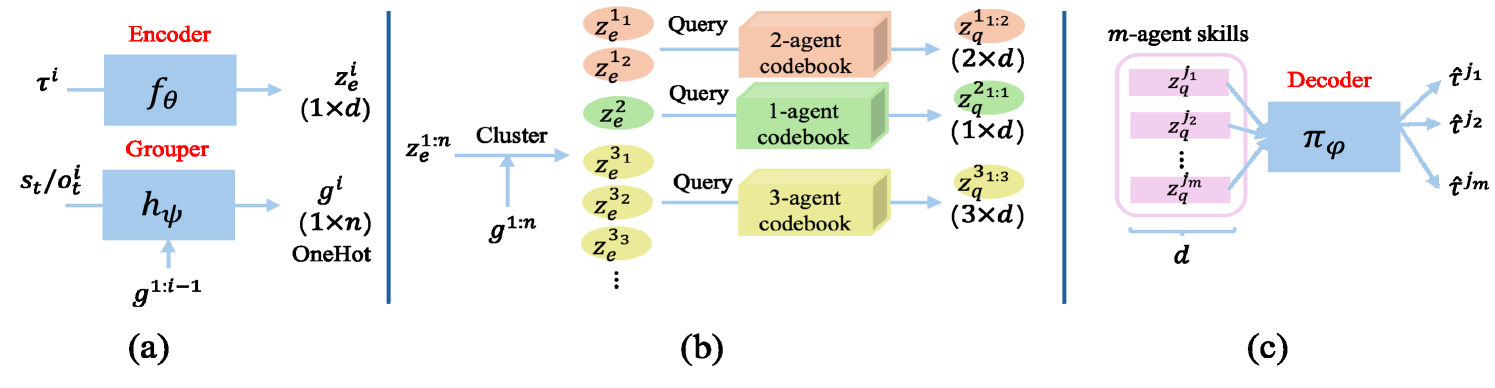
The core of the VOMASD approach is a variational inference framework that learns a generative model of skills from offline multi-agent data. [This builds on prior work in goal-exploration via adaptive skill distribution goal and balancing both behavioral quality diversity unsupervised skill learning.]
The model consists of a skill encoder that maps agent observations and actions to a latent skill representation, and a skill decoder that reconstructs the agent behaviors from the latent skills. By training this model to maximize the variational evidence lower bound, the authors show that it can discover a diverse set of skills that capture the structure of the offline data.
Crucially, the skill encoder and decoder are shared across agents, allowing the model to learn collaborative skills that span multiple agents. [This ties into recent work on bridging language vision action multimodal vaes robotic, which explores how AI systems can learn to ground language, vision, and actions in a unified framework.]
The authors evaluate VOMASD on several complex, multi-agent environments and demonstrate that it can discover more diverse and useful skills compared to baselines. This leads to improved performance on downstream tasks that require coordination and generalization.
Critical Analysis
The VOMASD approach represents an important step forward in the challenging problem of skill discovery for multi-agent reinforcement learning. By leveraging variational inference, the method is able to extract more information from limited offline data than previous techniques.
However, the paper does acknowledge some key limitations. For example, the authors note that VOMASD still struggles to discover skills that involve long-term temporal dependencies or complex interactions between agents. Additionally, the performance of the method is heavily dependent on the quality and coverage of the offline data, which may not always be easy to obtain in real-world settings.
Further research would be needed to address these limitations and expand the capabilities of VOMASD. For instance, integrating the skill discovery process with active exploration or incorporating richer skill representations could potentially lead to even more powerful and generalizable skill learning.
Overall, the VOMASD paper makes a valuable contribution to the field of multi-agent RL by introducing a novel approach to a fundamental problem. While not perfect, it represents an important step towards enabling AI agents to cooperate and solve complex tasks more effectively.
Conclusion
The Variational Offline Multi-agent Skill Discovery (VOMASD) technique proposed in this paper offers a promising new approach to the challenge of skill learning in multi-agent reinforcement learning environments. By leveraging variational inference, VOMASD can discover a diverse set of useful skills from limited offline data, enabling agents to collaborate and solve complex problems more effectively.
While the method has some limitations that require further research, the core ideas behind VOMASD represent an important advancement in the field. As AI systems continue to grow in complexity and ambition, techniques like this will be crucial for developing agents that can flexibly adapt to a wide range of tasks and environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!