Large Language Model-empowered multimodal strain sensory system for shape recognition, monitoring, and human interaction of tensegrity

0
💬
Sign in to get full access
Overview
- Tensegrity systems are a promising approach for exploring uneven and unpredictable environments, like space exploration.
- Implementing such systems presents challenges in areas like state recognition, wireless monitoring, human interaction, and smart analysis.
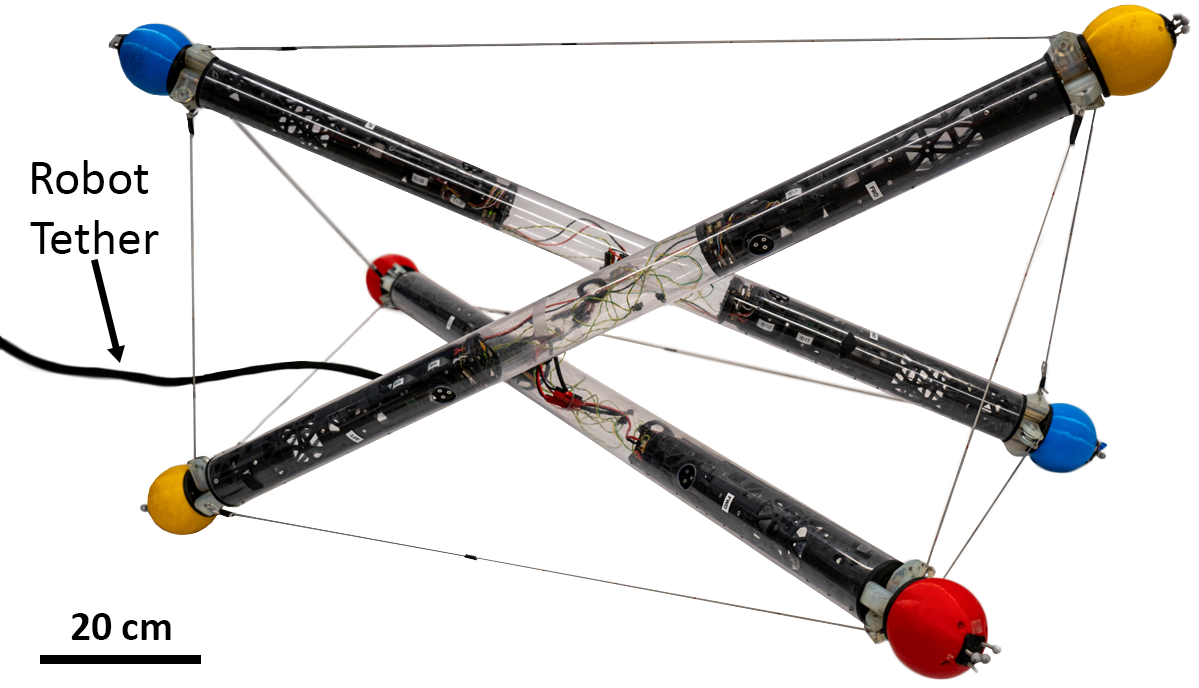
- This paper introduces a 6-strut tensegrity system integrated with 24 multimodal strain sensors, leveraging deep learning and large language models to create a "smart" tensegrity system.
Plain English Explanation
The paper discusses a tensegrity-based system, which is a type of structure that uses a combination of tension and compression elements to create a stable and flexible shape. These systems are seen as a promising approach for exploring uneven and unpredictable environments, such as those found in space exploration missions.
However, implementing such tensegrity systems comes with its own set of challenges. The paper focuses on addressing four key areas: state recognition, wireless monitoring, human interaction, and smart analysis and advising functions.
To address these challenges, the researchers developed a 6-strut tensegrity system integrated with 24 multimodal strain sensors. They used a combination of deep learning models and large language models to enable the tensegrity system to be "smart" - meaning it can perform tasks like self-shape reconstruction, wireless monitoring, data analysis, and providing suggestions to human users.
The key innovations include:
- Using conductive flexible tendons and a long short-term memory (LSTM) model to allow the tensegrity to reconstruct its own shape without external sensors.
- Integrating a Flask server and a GPT-3.5-Turbo language model to enable the tensegrity to send data to an iPhone for wireless monitoring, as well as provide data analysis, explanation, prediction, and suggestions to human users.
- Developing a human interaction system that allows users to obtain information about the tensegrity system using natural language.
Overall, this "intelligent" tensegrity system with self-sensing tendons showcases the potential for these types of structures to be used in a variety of real-world applications, particularly in areas like robotic tool use and multimodal reasoning.
Technical Explanation
The researchers developed a 6-strut tensegrity system integrated with 24 multimodal strain sensors. They used a combination of deep learning and large language models to enable the tensegrity system to perform various intelligent functions.
To allow the tensegrity to reconstruct its own shape without external sensors, the researchers used conductive flexible tendons and a long short-term memory (LSTM) model. The LSTM model was trained to learn the relationship between the strain sensor readings and the tensegrity's shape, enabling it to predict the structure's configuration based on the sensor data.
The researchers also integrated a Flask server and a GPT-3.5-Turbo language model to enable the tensegrity to send data to an iPhone for wireless monitoring. Additionally, the language model was used to provide data analysis, explanation, prediction, and suggestions to human users. This allowed the tensegrity system to autonomously communicate with users and provide insights about its state and performance.
Finally, the researchers developed a human interaction system that allows users to obtain information about the tensegrity system using natural language. This enables users to easily understand and interact with the tensegrity system, without requiring specialized technical knowledge.
Critical Analysis
The paper presents a compelling approach to creating a "smart" tensegrity system that can overcome some of the challenges associated with implementing such structures in real-world applications. The use of deep learning and large language models to enable self-shape reconstruction, wireless monitoring, and human interaction is a novel and promising approach.
However, the paper does not provide much detail on the specific architecture or training of the deep learning and language models used. Additionally, the paper does not address the potential limitations or drawbacks of this approach, such as the computational requirements, reliability, or scalability of the system.
It would also be interesting to see how this tensegrity system performs in real-world scenarios and how it compares to other approaches for creating intelligent, adaptive structures.
Overall, the paper presents an innovative solution to the challenges of implementing tensegrity systems and showcases the potential of these structures for future exploration and real-world applications. However, further research and testing would be needed to fully evaluate the system's capabilities and limitations.
Conclusion
This paper introduces a novel approach to creating a "smart" tensegrity system that can overcome some of the key challenges associated with implementing such structures in real-world applications. By integrating deep learning and large language models, the researchers have developed a tensegrity system with the ability to self-reconstruct its shape, wirelessly communicate with users, and provide data analysis and insights.
The use of this intelligent tensegrity system with self-sensing tendons showcases the potential for these types of structures to be used in a variety of applications, from space exploration to robotic tool use and multimodal reasoning. While further research and testing are needed, this paper represents an important step forward in the development of advanced, adaptive structures that can navigate and interact with complex, unpredictable environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
0
Large Language Model-empowered multimodal strain sensory system for shape recognition, monitoring, and human interaction of tensegrity
Zebing Mao, Ryota Kobayashi, Hiroyuki Nabae, Koichi Suzumori
A tensegrity-based system is a promising approach for dynamic exploration of uneven and unpredictable environments, particularly, space exploration. However, implementing such systems presents challenges in terms of intelligent aspects: state recognition, wireless monitoring, human interaction, and smart analyzing and advising function. Here, we introduce a 6-strut tensegrity integrate with 24 multimodal strain sensors by leveraging both deep learning model and large language models to realize smart tensegrity. Using conductive flexible tendons assisted by long short-term memory model, the tensegrity achieves the self-shape reconstruction without extern sensors. Through integrating the flask server and gpt-3.5-turbo model, the tensegrity autonomously enables to send data to iPhone for wireless monitoring and provides data analysis, explanation, prediction, and suggestions to human for decision making. Finally, human interaction system of the tensegrity helps human obtain necessary information of tensegrity from the aspect of human language. Overall, this intelligent tensegrity-based system with self-sensing tendons showcases potential for future exploration, making it a versatile tool for real-world applications.
Read more6/18/2024

0
Adaptive Stiffness: A Biomimetic Robotic System with Tensegrity-Based Compliant Mechanism
Po-Yu Hsieh, June-Hao Hou
Biomimicry has played a pivotal role in robotics. In contrast to rigid robots, bio-inspired robots exhibit an inherent compliance, facilitating versatile movements and operations in constrained spaces. The robot implementation in fabrication, however, has posed technical challenges and mechanical complexity, thereby underscoring a noticeable gap between research and practice. To address the limitation, the research draws inspiration from the unique musculoskeletal feature of vertebrate physiology, which displays significant capabilities for sophisticated locomotion. The research converts the biological paradigm into a tensegrity-based robotic system, which is formed by the design of rigid-flex coupling and a compliant mechanism. This integrated technique enables the robot to achieve a wide range of motions with variable stiffness and adaptability, holding great potential for advanced performance in ill-defined environments. In summation, the research aims to provide a robust foundation for tensegrity-based biomimetic robots in practice, enhancing the feasibility of undertaking intricate robotic constructions.
Read more7/9/2024

0
Form-Finding and Physical Property Predictions of Tensegrity Structures Using Deep Neural Networks
Muhao Chen, Jing Qin
In the design of tensegrity structures, traditional form-finding methods utilize kinematic and static approaches to identify geometric configurations that achieve equilibrium. However, these methods often fall short when applied to actual physical models due to imperfections in the manufacturing of structural elements, assembly errors, and material non-linearities. In this work, we develop a deep neural network (DNN) approach to predict the geometric configurations and physical properties-such as nodal coordinates, member forces, and natural frequencies-of any tensegrity structures in equilibrium states. First, we outline the analytical governing equations for tensegrity structures, covering statics involving nodal coordinates and member forces, as well as modal information. Next, we propose a data-driven framework for training an appropriate DNN model capable of simultaneously predicting tensegrity forms and physical properties, thereby circumventing the need to solve equilibrium equations. For validation, we analyze three tensegrity structures, including a tensegrity D-bar, prism, and lander, demonstrating that our approach can identify approximation systems with relatively very small output errors. This technique is applicable to a wide range of tensegrity structures, particularly in real-world construction, and can be extended to address additional challenges in identifying structural physics information.
Read more7/18/2024
0
Design of a Variable Stiffness Quasi-Direct Drive Cable-Actuated Tensegrity Robot
Jonathan Mi, Wenzhe Tong, Yilin Ma, Xiaonan Huang
Tensegrity robots excel in tasks requiring extreme levels of deformability and robustness. However, there are challenges in state estimation and payload versatility due to their high number of degrees of freedom and unconventional shape. This paper introduces a modular three-bar tensegrity robot featuring a customizable payload design. Our tensegrity robot employs a novel Quasi-Direct Drive (QDD) cable actuator paired with low-stretch polymer cables to achieve accurate proprioception without the need for external force or torque sensors. The design allows for on-the-fly stiffness tuning for better environment and payload adaptability. In this paper, we present the design, fabrication, assembly, and experimental results of the robot. Experimental data demonstrates the high accuracy cable length estimation (<1% error relative to bar length) and variable stiffness control of the cable actuator up to 7 times the minimum stiffness for self support. The presented tensegrity robot serves as a platform for future advancements in autonomous operation and open-source module design.
Read more9/10/2024