LASIL: Learner-Aware Supervised Imitation Learning For Long-term Microscopic Traffic Simulation
2403.17601
0
0

Abstract
Microscopic traffic simulation plays a crucial role in transportation engineering by providing insights into individual vehicle behavior and overall traffic flow. However, creating a realistic simulator that accurately replicates human driving behaviors in various traffic conditions presents significant challenges. Traditional simulators relying on heuristic models often fail to deliver accurate simulations due to the complexity of real-world traffic environments. Due to the covariate shift issue, existing imitation learning-based simulators often fail to generate stable long-term simulations. In this paper, we propose a novel approach called learner-aware supervised imitation learning to address the covariate shift problem in multi-agent imitation learning. By leveraging a variational autoencoder simultaneously modeling the expert and learner state distribution, our approach augments expert states such that the augmented state is aware of learner state distribution. Our method, applied to urban traffic simulation, demonstrates significant improvements over existing state-of-the-art baselines in both short-term microscopic and long-term macroscopic realism when evaluated on the real-world dataset pNEUMA.
Create account to get full access
Overview
- This paper presents LASIL, a new supervised imitation learning method for long-term microscopic traffic simulation.
- LASIL aims to improve upon existing imitation learning approaches by accounting for the learner's own unique characteristics and limitations.
- The authors show that LASIL outperforms traditional imitation learning methods in terms of long-term simulation accuracy and robustness.
Plain English Explanation
The paper discusses a new machine learning method called LASIL (Learner-Aware Supervised Imitation Learning) for simulating traffic patterns over long time periods. Traditional imitation learning approaches try to mimic expert behavior, but they don't always work well when the learner (the AI system) has different capabilities or limitations compared to the expert.
LASIL addresses this by explicitly taking the learner's characteristics into account during the training process. The key idea is to create a model that can accurately predict how the learner will behave, rather than just trying to copy the expert's actions. This allows the model to generate more realistic and robust long-term traffic simulations.
The authors demonstrate through experiments that LASIL outperforms standard imitation learning techniques on several metrics, particularly when it comes to maintaining accuracy over extended time periods. This suggests LASIL could be a valuable tool for transportation planning and analysis, allowing for more reliable predictions of how traffic will evolve.
Technical Explanation
The paper introduces a new Learner-Aware Supervised Imitation Learning (LASIL) framework for long-term microscopic traffic simulation. Traditional imitation learning approaches try to directly mimic expert demonstrations, but they can struggle when the learner's capabilities differ from the expert's.
LASIL addresses this by incorporating the learner's own dynamics and constraints into the training process. The key idea is to learn a model that can accurately predict how the learner will behave, rather than just replicating the expert's actions. This learner-aware approach allows the simulated traffic patterns to remain realistic and stable over long time horizons.
The authors evaluate LASIL on several long-term traffic simulation benchmarks, demonstrating its superior performance compared to standard imitation learning baselines. They also analyze the importance of the learner-aware modeling component through ablation studies.
Critical Analysis
The paper makes a compelling case for the value of LASIL in long-term traffic simulation tasks. By accounting for the learner's unique characteristics, the method is able to generate more accurate and robust predictions over extended time periods.
That said, the authors acknowledge several limitations and areas for future work. For example, the current implementation assumes the learner's dynamics can be accurately modeled, which may not always be the case in practice. There is also scope to explore more advanced imitation learning techniques, such as adversarial approaches, to further improve performance.
Additionally, the paper focuses on microscopic traffic simulation, but the ideas behind LASIL could potentially be applied to other sequential decision-making domains where there is a mismatch between expert and learner capabilities. Exploring these broader applications could be a fruitful direction for future research.
Conclusion
This paper presents LASIL, a novel supervised imitation learning framework that explicitly models the learner's own dynamics and constraints. By taking this learner-aware approach, the method is able to generate more accurate and stable long-term traffic simulations compared to standard imitation learning techniques.
The authors demonstrate the effectiveness of LASIL through extensive experiments, highlighting its potential as a valuable tool for transportation planning and analysis. While the current work is focused on microscopic traffic simulation, the underlying principles could have broader applications in other sequential decision-making domains where bridging the gap between expert and learner is crucial.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Towards Imitation Learning in Real World Unstructured Social Mini-Games in Pedestrian Crowds
Rohan Chandra, Haresh Karnan, Negar Mehr, Peter Stone, Joydeep Biswas
0
0
Imitation Learning (IL) strategies are used to generate policies for robot motion planning and navigation by learning from human trajectories. Recently, there has been a lot of excitement in applying IL in social interactions arising in urban environments such as university campuses, restaurants, grocery stores, and hospitals. However, obtaining numerous expert demonstrations in social settings might be expensive, risky, or even impossible. Current approaches therefore, focus only on simulated social interaction scenarios. This raises the question: textit{How can a robot learn to imitate an expert demonstrator from real world multi-agent social interaction scenarios}? It remains unknown which, if any, IL methods perform well and what assumptions they require. We benchmark representative IL methods in real world social interaction scenarios on a motion planning task, using a novel pedestrian intersection dataset collected at the University of Texas at Austin campus. Our evaluation reveals two key findings: first, learning multi-agent cost functions is required for learning the diverse behavior modes of agents in tightly coupled interactions and second, conditioning the training of IL methods on partial state information or providing global information in simulation can improve imitation learning, especially in real world social interaction scenarios.
5/28/2024
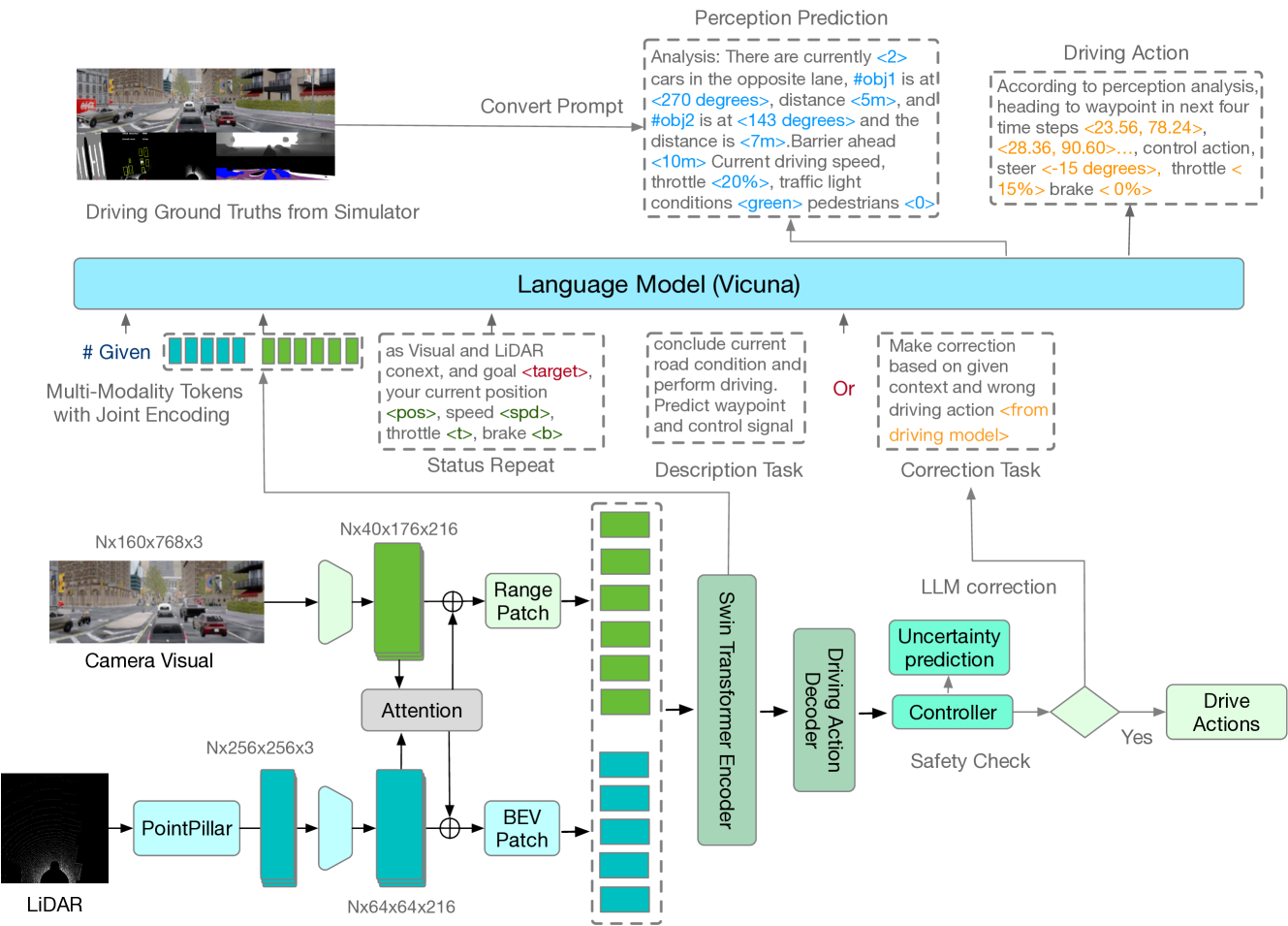
Prompting Multi-Modal Tokens to Enhance End-to-End Autonomous Driving Imitation Learning with LLMs
Yiqun Duan, Qiang Zhang, Renjing Xu
0
0
The utilization of Large Language Models (LLMs) within the realm of reinforcement learning, particularly as planners, has garnered a significant degree of attention in recent scholarly literature. However, a substantial proportion of existing research predominantly focuses on planning models for robotics that transmute the outputs derived from perception models into linguistic forms, thus adopting a `pure-language' strategy. In this research, we propose a hybrid End-to-End learning framework for autonomous driving by combining basic driving imitation learning with LLMs based on multi-modality prompt tokens. Instead of simply converting perception results from the separated train model into pure language input, our novelty lies in two aspects. 1) The end-to-end integration of visual and LiDAR sensory input into learnable multi-modality tokens, thereby intrinsically alleviating description bias by separated pre-trained perception models. 2) Instead of directly letting LLMs drive, this paper explores a hybrid setting of letting LLMs help the driving model correct mistakes and complicated scenarios. The results of our experiments suggest that the proposed methodology can attain driving scores of 49.21%, coupled with an impressive route completion rate of 91.34% in the offline evaluation conducted via CARLA. These performance metrics are comparable to the most advanced driving models.
4/9/2024

Learning from Mistakes: a Weakly-supervised Method for Mitigating the Distribution Shift in Autonomous Vehicle Planning
Fazel Arasteh, Mohammed Elmahgiubi, Behzad Khamidehi, Hamidreza Mirkhani, Weize Zhang, Kasra Rezaee
0
0
The planning problem constitutes a fundamental aspect of the autonomous driving framework. Recent strides in representation learning have empowered vehicles to comprehend their surrounding environments, thereby facilitating the integration of learning-based planning strategies. Among these approaches, Imitation Learning stands out due to its notable training efficiency. However, traditional Imitation Learning methodologies encounter challenges associated with the co-variate shift phenomenon. We propose Learn from Mistakes (LfM) as a remedy to address this issue. The essence of LfM lies in deploying a pre-trained planner across diverse scenarios. Instances where the planner deviates from its immediate objectives, such as maintaining a safe distance from obstacles or adhering to traffic rules, are flagged as mistakes. The environments corresponding to these mistakes are categorized as out-of-distribution states and compiled into a new dataset termed closed-loop mistakes dataset. Notably, the absence of expert annotations for the closed-loop data precludes the applicability of standard imitation learning approaches. To facilitate learning from the closed-loop mistakes, we introduce Validity Learning, a weakly supervised method, which aims to discern valid trajectories within the current environmental context. Experimental evaluations conducted on the InD and Nuplan datasets reveal substantial enhancements in closed-loop metrics such as Progress and Collision Rate, underscoring the effectiveness of the proposed methodology.
6/4/2024

Reinforcement Learning with Latent State Inference for Autonomous On-ramp Merging under Observation Delay
Amin Tabrizian, Zhitong Huang, Peng Wei
0
0
This paper presents a novel approach to address the challenging problem of autonomous on-ramp merging, where a self-driving vehicle needs to seamlessly integrate into a flow of vehicles on a multi-lane highway. We introduce the Lane-keeping, Lane-changing with Latent-state Inference and Safety Controller (L3IS) agent, designed to perform the on-ramp merging task safely without comprehensive knowledge about surrounding vehicles' intents or driving styles. We also present an augmentation of this agent called AL3IS that accounts for observation delays, allowing the agent to make more robust decisions in real-world environments with vehicle-to-vehicle (V2V) communication delays. By modeling the unobservable aspects of the environment through latent states, such as other drivers' intents, our approach enhances the agent's ability to adapt to dynamic traffic conditions, optimize merging maneuvers, and ensure safe interactions with other vehicles. We demonstrate the effectiveness of our method through extensive simulations generated from real traffic data and compare its performance with existing approaches. L3IS shows a 99.90% success rate in a challenging on-ramp merging case generated from the real US Highway 101 data. We further perform a sensitivity analysis on AL3IS to evaluate its robustness against varying observation delays, which demonstrates an acceptable performance of 93.84% success rate in 1-second V2V communication delay.
6/24/2024