Learning with 3D rotations, a hitchhiker's guide to SO(3)

0

Sign in to get full access
Overview
- Discusses the challenges of learning 3D rotational dynamics and representations
- Presents a "hitchhiker's guide" to understanding the special orthogonal group SO(3), which describes 3D rotations
- Explores various approaches for handling 3D rotations in machine learning tasks
Plain English Explanation
This paper delves into the complexities of working with 3D rotations in machine learning. 3D rotations are important in many real-world applications, such as robotics, but they can be tricky to represent and work with computationally.
The special orthogonal group SO(3) is the mathematical framework that describes 3D rotations. The authors provide an accessible introduction to this group, explaining its properties and how it can be used to model rotational dynamics. They explore different approaches for representing rotations and learning meaningful representations that capture the underlying structure of SO(3).
The paper also discusses equivariant neural networks and Laplacian-based representations, which are techniques that can help machine learning models better handle 3D rotations. These approaches aim to leverage the properties of SO(3) to improve the performance and interpretability of models working with rotational data.
Technical Explanation
The paper begins by introducing the problem setting of learning 3D rotational dynamics and representations. The authors highlight the importance of this task in various applications, such as robotics, and the challenges posed by the complex geometry of 3D rotations.
To address these challenges, the paper delves into the mathematical framework of the special orthogonal group SO(3). The authors provide a detailed explanation of the group's properties, including its non-Euclidean structure and the challenges in parameterizing and working with its elements. They discuss different representations of rotations, such as Euler angles, quaternions, and rotation matrices, and the trade-offs between them.
The paper then explores various approaches for handling 3D rotations in machine learning tasks. One focus is on equivariant neural networks, which are designed to be invariant to rotations and can better capture the underlying structure of SO(3). The authors also discuss Laplacian-based representations and how they can be used to learn meaningful representations of rotational data.
Additionally, the paper covers techniques for learning 3D rotational dynamics and extracting meaningful representations from rotational data. These approaches aim to capture the complex, non-linear relationships inherent in 3D rotations and leverage them for improved model performance and interpretability.
Critical Analysis
The paper provides a comprehensive overview of the challenges and techniques involved in working with 3D rotations in machine learning. The authors' in-depth exploration of the special orthogonal group SO(3) and the various representation methods is a valuable contribution, as it helps researchers and practitioners better understand the underlying mathematics and its implications for practical applications.
One potential limitation of the paper is its focus on the theoretical aspects of the problem, with fewer concrete examples or case studies demonstrating the real-world performance of the proposed techniques. While the technical explanations are thorough, the paper could be enhanced by including more practical insights and discussions on the trade-offs and challenges encountered when implementing these methods in practice.
Additionally, the paper does not delve deeply into the potential biases or limitations of the presented approaches. For instance, the performance of equivariant neural networks or Laplacian-based representations may be sensitive to the specific task, dataset, or model architecture, and the paper could have explored these nuances in more detail.
Nevertheless, this paper serves as an excellent starting point for researchers and engineers interested in mastering the intricacies of 3D rotational dynamics and representations in machine learning. By highlighting the key concepts and state-of-the-art techniques, it provides a solid foundation for further exploration and advancement in this important field.
Conclusion
This paper offers a comprehensive "hitchhiker's guide" to understanding and working with 3D rotations in machine learning. By delving into the mathematical framework of the special orthogonal group SO(3) and exploring various representation methods and learning techniques, the authors have provided a valuable resource for researchers and practitioners navigating the complexities of this domain.
The paper's emphasis on equivariant neural networks, Laplacian-based representations, and learning 3D rotational dynamics showcases the latest advancements in this field and their potential to improve the performance and interpretability of models dealing with rotational data. While the paper focuses more on the theoretical aspects, it lays the groundwork for further research and practical applications in areas such as robotics, computer vision, and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning with 3D rotations, a hitchhiker's guide to SO(3)
A. Ren'e Geist, Jonas Frey, Mikel Zobro, Anna Levina, Georg Martius
Many settings in machine learning require the selection of a rotation representation. However, choosing a suitable representation from the many available options is challenging. This paper acts as a survey and guide through rotation representations. We walk through their properties that harm or benefit deep learning with gradient-based optimization. By consolidating insights from rotation-based learning, we provide a comprehensive overview of learning functions with rotation representations. We provide guidance on selecting representations based on whether rotations are in the model's input or output and whether the data primarily comprises small angles.
Read more6/21/2024

0
Graph representations of 3D data for machine learning
Tomasz Prytu{l}a
We give an overview of combinatorial methods to represent 3D data, such as graphs and meshes, from the viewpoint of their amenability to analysis using machine learning algorithms. We highlight pros and cons of various representations and we discuss some methods of generating/switching between the representations. We finally present two concrete applications in life science and industry. Despite its theoretical nature, our discussion is in general motivated by, and biased towards real-world challenges.
Read more8/19/2024
🛠️
0
Learning to Predict 3D Rotational Dynamics from Images of a Rigid Body with Unknown Mass Distribution
Justice Mason, Christine Allen-Blanchette, Nicholas Zolman, Elizabeth Davison, Naomi Ehrich Leonard
In many real-world settings, image observations of freely rotating 3D rigid bodies may be available when low-dimensional measurements are not. However, the high-dimensionality of image data precludes the use of classical estimation techniques to learn the dynamics. The usefulness of standard deep learning methods is also limited, because an image of a rigid body reveals nothing about the distribution of mass inside the body, which, together with initial angular velocity, is what determines how the body will rotate. We present a physics-based neural network model to estimate and predict 3D rotational dynamics from image sequences. We achieve this using a multi-stage prediction pipeline that maps individual images to a latent representation homeomorphic to $mathbf{SO}(3)$, computes angular velocities from latent pairs, and predicts future latent states using the Hamiltonian equations of motion. We demonstrate the efficacy of our approach on new rotating rigid-body datasets of sequences of synthetic images of rotating objects, including cubes, prisms and satellites, with unknown uniform and non-uniform mass distributions. Our model outperforms competing baselines on our datasets, producing better qualitative predictions and reducing the error observed for the state-of-the-art Hamiltonian Generative Network by a factor of 2.
Read more4/12/2024
0
A Framework of SO(3)-equivariant Non-linear Representation Learning and its Application to Electronic-Structure Hamiltonian Prediction
Shi Yin, Xinyang Pan, Fengyan Wang, Feng Wu, Lixin He
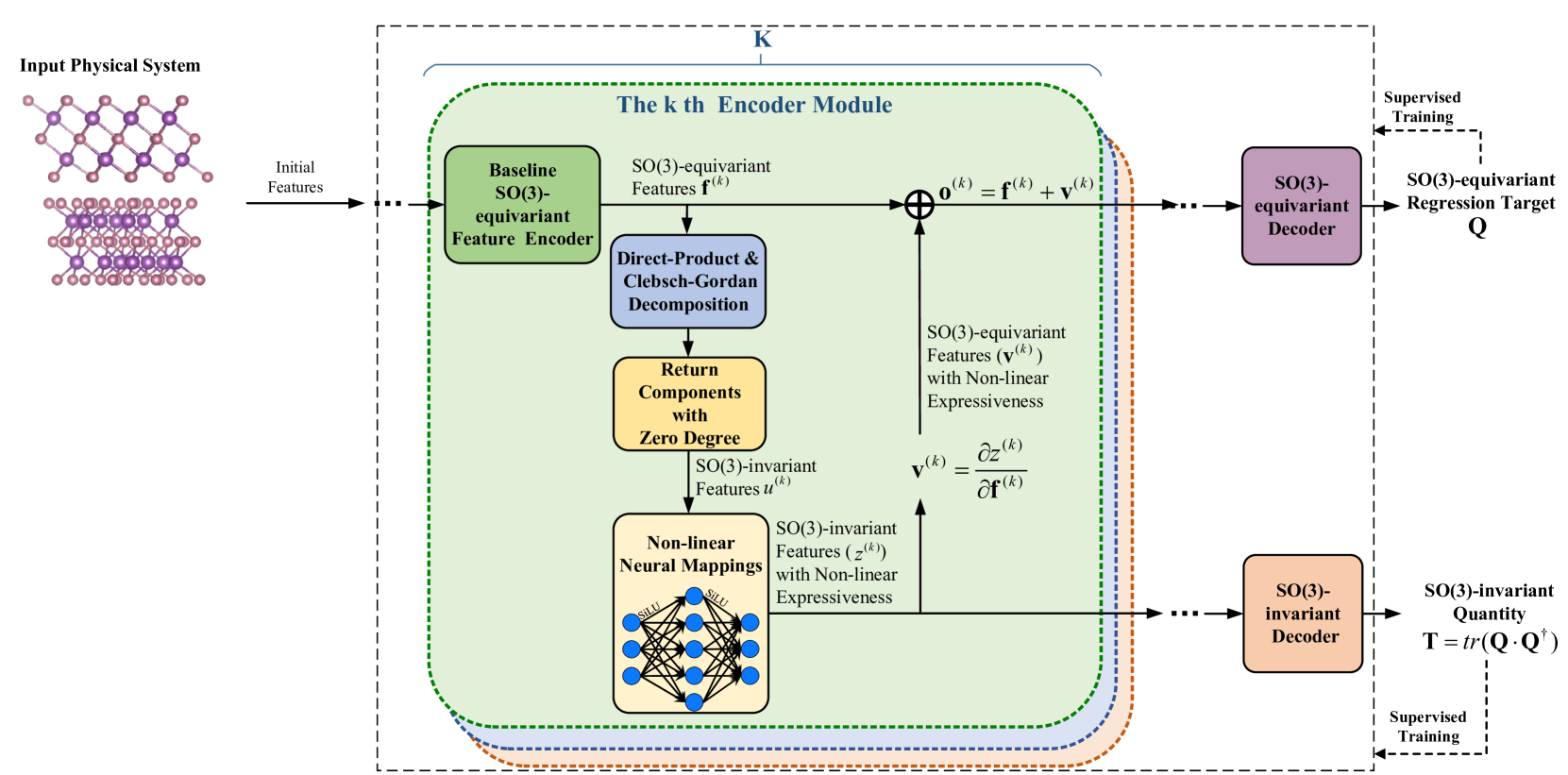
We present both a theoretical and a methodological framework that addresses a critical challenge in applying deep learning to physical systems: the reconciliation of non-linear expressiveness with SO(3)-equivariance in predictions of SO(3)-equivariant quantities. Inspired by covariant theory in physics, we address this problem by exploring the mathematical relationships between SO(3)-invariant and SO(3)-equivariant quantities and their representations. We first construct theoretical SO(3)-invariant quantities derived from the SO(3)-equivariant regression targets, and use these invariant quantities as supervisory labels to guide the learning of high-quality SO(3)-invariant features. Given that SO(3)-invariance is preserved under non-linear operations, the encoding process for invariant features can extensively utilize non-linear mappings, thereby fully capturing the non-linear patterns inherent in physical systems. Building on this foundation, we propose a gradient-based mechanism to induce SO(3)-equivariant encodings of various degrees from the learned SO(3)-invariant features. This mechanism can incorporate non-linear expressive capabilities into SO(3)-equivariant representations, while theoretically preserving their equivariant properties as we prove. We apply our theory and method to the electronic-structure Hamiltonian prediction tasks, experimental results on eight benchmark databases covering multiple types of elements and challenging scenarios show dramatic breakthroughs on the state-of-the-art prediction accuracy, with improvements of up to 40% in predicting Hamiltonians and up to 76% in predicting downstream physical quantities such as occupied orbital energy. Our approach goes beyond handling physical systems and offers a promising general solution to the critical dilemma between equivariance and non-linear expressiveness for the deep learning paradigm.
Read more6/19/2024