Learning to Predict 3D Rotational Dynamics from Images of a Rigid Body with Unknown Mass Distribution
2308.14666
0
0
🛠️
Abstract
In many real-world settings, image observations of freely rotating 3D rigid bodies may be available when low-dimensional measurements are not. However, the high-dimensionality of image data precludes the use of classical estimation techniques to learn the dynamics. The usefulness of standard deep learning methods is also limited, because an image of a rigid body reveals nothing about the distribution of mass inside the body, which, together with initial angular velocity, is what determines how the body will rotate. We present a physics-based neural network model to estimate and predict 3D rotational dynamics from image sequences. We achieve this using a multi-stage prediction pipeline that maps individual images to a latent representation homeomorphic to $mathbf{SO}(3)$, computes angular velocities from latent pairs, and predicts future latent states using the Hamiltonian equations of motion. We demonstrate the efficacy of our approach on new rotating rigid-body datasets of sequences of synthetic images of rotating objects, including cubes, prisms and satellites, with unknown uniform and non-uniform mass distributions. Our model outperforms competing baselines on our datasets, producing better qualitative predictions and reducing the error observed for the state-of-the-art Hamiltonian Generative Network by a factor of 2.
Create account to get full access
Overview
- The paper presents a physics-based neural network model to estimate and predict 3D rotational dynamics from image sequences of freely rotating 3D rigid bodies.
- Classical estimation techniques and standard deep learning methods are limited in their ability to handle the high-dimensionality of image data and the need to consider the distribution of mass within the rigid body.
- The proposed model uses a multi-stage prediction pipeline to map individual images to a latent representation homeomorphic to SO(3), compute angular velocities from latent pairs, and predict future latent states using the Hamiltonian equations of motion.
- The model is evaluated on new rotating rigid-body datasets of synthetic images of rotating objects with known and unknown mass distributions.
Plain English Explanation
When observing freely rotating 3D objects in the real world, we often have access to image data, but not the low-dimensional measurements that are typically used in classical estimation techniques. However, the high-dimensionality of images makes it challenging to use these traditional methods to learn the dynamics of the rotating objects.
Standard deep learning methods are also limited because an image of a rigid body reveals nothing about the distribution of mass inside the body, which is crucial for determining how the object will rotate, along with its initial angular velocity.
To address this challenge, the researchers developed a physics-based neural network model that can estimate and predict the 3D rotational dynamics of rigid bodies from image sequences. Their approach uses a multi-stage pipeline that first maps individual images to a latent representation that is similar to the mathematical structure of rotation in 3D space (SO(3)). Then, it computes the angular velocities from pairs of these latent representations and uses the Hamiltonian equations of motion to predict how the object will rotate in the future.
By using this physics-based approach, the model can better capture the underlying dynamics of the rotating objects, even when the mass distribution within the object is not known. The researchers tested their model on new datasets of synthetic images of rotating objects, including cubes, prisms, and satellites, and found that it outperformed other state-of-the-art methods, producing better qualitative predictions and reducing the error by a factor of 2.
Technical Explanation
The key innovation of this paper is the development of a physics-based neural network model that can estimate and predict the 3D rotational dynamics of rigid bodies from image sequences. The model uses a multi-stage prediction pipeline to address the challenges posed by the high-dimensionality of image data and the need to consider the distribution of mass within the rigid body.
The first stage of the pipeline maps individual images to a latent representation that is homeomorphic to the special orthogonal group SO(3), which mathematically describes the structure of 3D rotations. This allows the model to capture the underlying rotational dynamics of the rigid body.
In the second stage, the model computes the angular velocities from pairs of these latent representations. Finally, the third stage uses the Hamiltonian equations of motion to predict how the object will rotate in the future, based on the computed angular velocities and the latent representations.
By using this physics-based approach, the model can better capture the underlying dynamics of the rotating objects, even when the mass distribution within the object is not known. The researchers evaluated their model on new datasets of synthetic images of rotating objects, including cubes, prisms, and satellites, with both known and unknown mass distributions.
The results show that the proposed model outperforms other state-of-the-art methods, such as the Hamiltonian Generative Network, in terms of qualitative predictions and reducing the error by a factor of 2.
Critical Analysis
The paper presents a compelling approach to estimating and predicting the 3D rotational dynamics of rigid bodies from image sequences, which is a challenging problem in computer vision and robotics. The use of a physics-based neural network model with a multi-stage prediction pipeline is a novel and promising solution that addresses the limitations of classical estimation techniques and standard deep learning methods.
One potential limitation of the research is the use of synthetic datasets for evaluation. While the authors demonstrate the effectiveness of their model on these datasets, it would be important to validate the approach on real-world data to ensure its applicability in practical scenarios. Additionally, the paper does not provide a detailed analysis of the computational complexity or the training time of the proposed model, which could be important considerations for real-world deployment.
Furthermore, the paper does not explore the potential for modeling kinematic uncertainty in the rotational dynamics, which could be a valuable extension to address noise or uncertainties in the image data or the underlying physical parameters.
Despite these potential limitations, the overall approach presented in the paper is a significant contribution to the field of computer vision and robotics, and it opens up interesting avenues for further research in neural implicit representations and physics-based modeling of complex dynamic systems.
Conclusion
This paper presents a novel physics-based neural network model for estimating and predicting the 3D rotational dynamics of freely rotating rigid bodies from image sequences. The key innovation is the use of a multi-stage prediction pipeline that maps images to a latent representation homeomorphic to SO(3), computes angular velocities, and predicts future latent states using the Hamiltonian equations of motion.
The model's ability to capture the underlying dynamics of rotating objects, even with unknown mass distributions, is a significant advancement in the field of computer vision and robotics. While the evaluation was limited to synthetic datasets, the results demonstrate the potential of this approach to outperform state-of-the-art methods in terms of both qualitative predictions and quantitative error reduction.
The research provides a promising foundation for further exploration of physics-based neural network models for complex dynamic systems, as well as the potential to incorporate uncertainty modeling and validation on real-world data. Ultimately, this work represents an important step towards more robust and accurate estimation and prediction of 3D rotational dynamics from image observations.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
Just rotate it! Uncertainty estimation in closed-source models via multiple queries
Konstantinos Pitas, Julyan Arbel
0
0
We propose a simple and effective method to estimate the uncertainty of closed-source deep neural network image classification models. Given a base image, our method creates multiple transformed versions and uses them to query the top-1 prediction of the closed-source model. We demonstrate significant improvements in the calibration of uncertainty estimates compared to the naive baseline of assigning 100% confidence to all predictions. While we initially explore Gaussian perturbations, our empirical findings indicate that natural transformations, such as rotations and elastic deformations, yield even better-calibrated predictions. Furthermore, through empirical results and a straightforward theoretical analysis, we elucidate the reasons behind the superior performance of natural transformations over Gaussian noise. Leveraging these insights, we propose a transfer learning approach that further improves our calibration results.
5/24/2024
Vision-based Discovery of Nonlinear Dynamics for 3D Moving Target
Zitong Zhang, Yang Liu, Hao Sun
0
0
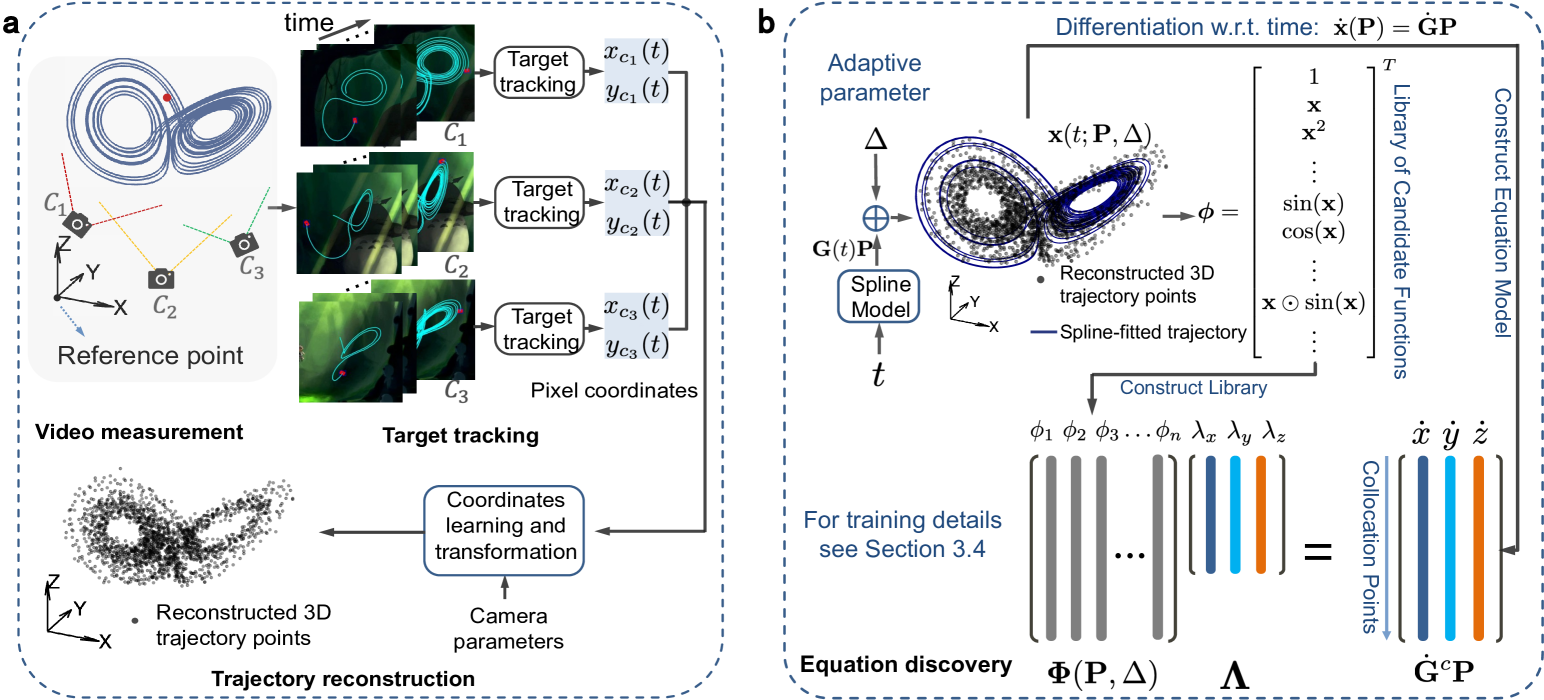
Data-driven discovery of governing equations has kindled significant interests in many science and engineering areas. Existing studies primarily focus on uncovering equations that govern nonlinear dynamics based on direct measurement of the system states (e.g., trajectories). Limited efforts have been placed on distilling governing laws of dynamics directly from videos for moving targets in a 3D space. To this end, we propose a vision-based approach to automatically uncover governing equations of nonlinear dynamics for 3D moving targets via raw videos recorded by a set of cameras. The approach is composed of three key blocks: (1) a target tracking module that extracts plane pixel motions of the moving target in each video, (2) a Rodrigues' rotation formula-based coordinate transformation learning module that reconstructs the 3D coordinates with respect to a predefined reference point, and (3) a spline-enhanced library-based sparse regressor that uncovers the underlying governing law of dynamics. This framework is capable of effectively handling the challenges associated with measurement data, e.g., noise in the video, imprecise tracking of the target that causes data missing, etc. The efficacy of our method has been demonstrated through multiple sets of synthetic videos considering different nonlinear dynamics.
4/30/2024

Learning Priors for Non Rigid SfM from Casual Videos
Yoni Kasten, Wuyue Lu, Haggai Maron
0
0
This paper addresses the long-standing challenge of reconstructing 3D structures from videos with dynamic content. Current approaches to this problem were not designed to operate on casual videos recorded by standard cameras or require a long optimization time. Aiming to significantly improve the efficiency of previous approaches, we present TracksTo4D, a learning-based approach that enables inferring 3D structure and camera positions from dynamic content originating from casual videos using a single efficient feed-forward pass. To achieve this, we propose operating directly over 2D point tracks as input and designing an architecture tailored for processing 2D point tracks. Our proposed architecture is designed with two key principles in mind: (1) it takes into account the inherent symmetries present in the input point tracks data, and (2) it assumes that the movement patterns can be effectively represented using a low-rank approximation. TracksTo4D is trained in an unsupervised way on a dataset of casual videos utilizing only the 2D point tracks extracted from the videos, without any 3D supervision. Our experiments show that TracksTo4D can reconstruct a temporal point cloud and camera positions of the underlying video with accuracy comparable to state-of-the-art methods, while drastically reducing runtime by up to 95%. We further show that TracksTo4D generalizes well to unseen videos of unseen semantic categories at inference time.
6/28/2024
🖼️
Generative Image Dynamics
Zhengqi Li, Richard Tucker, Noah Snavely, Aleksander Holynski
0
0
We present an approach to modeling an image-space prior on scene motion. Our prior is learned from a collection of motion trajectories extracted from real video sequences depicting natural, oscillatory dynamics such as trees, flowers, candles, and clothes swaying in the wind. We model this dense, long-term motion prior in the Fourier domain:given a single image, our trained model uses a frequency-coordinated diffusion sampling process to predict a spectral volume, which can be converted into a motion texture that spans an entire video. Along with an image-based rendering module, these trajectories can be used for a number of downstream applications, such as turning still images into seamlessly looping videos, or allowing users to realistically interact with objects in real pictures by interpreting the spectral volumes as image-space modal bases, which approximate object dynamics.
5/16/2024