Learning Gentle Grasping from Human-Free Force Control Demonstration

0
❗
Sign in to get full access
Overview
- Humans can easily grasp unfamiliar objects using their sense of touch, but robots still struggle to achieve similar performance.
- The key challenges are learning accurate grasp-force predictions and force control strategies that can be generalized from limited data.
- This paper proposes an approach for learning grasping from ideal force control demonstrations to achieve human-like performance with limited data.
Plain English Explanation
The paper tackles the challenge of getting robots to grasp objects as gently and effectively as human hands. Humans can easily pick up new objects by relying on their sense of touch, but robots often struggle with this task. The main problems are that robots have a hard time learning how much force to apply when grasping an object, and they have trouble taking what they've learned from a few examples and applying it to new situations.
The researchers' approach involves using objects with known contact characteristics to automatically generate the ideal force curves for grasping, without needing human demonstrations. They also designed a Dual Convolutional Neural Network architecture that incorporates a physics-based mechanics module to learn the target grasping forces from the demonstration data.
The key idea is to use this system to enable robots to grasp objects gently and stably, even when picking them up off the ground. The researchers validated their prediction model and grasping strategy through offline evaluations and online experiments, demonstrating the accuracy and generalizability of the approach.
Technical Explanation
The paper presents a novel approach for learning gentle grasping skills from limited data, by utilizing objects with known contact characteristics to generate reference force curves without human demonstrations.
The core of the system is a Dual Convolutional Neural Network (Dual-CNN) architecture that incorporates a physics-based mechanics module for learning target grasping force predictions from demonstrations. This allows the model to learn accurate force control strategies that can be generalized to new objects.
The researchers validated their approach through both offline evaluations and online experiments, demonstrating the accuracy and generalizability of the grasping prediction model and strategy. The results show that the proposed method can effectively enable vision-based tactile sensors to achieve gentle and stable grasping of objects, even when picking them up from the ground.
Critical Analysis
The paper makes a strong case for the proposed approach, providing thorough evaluations and experimental results to support its effectiveness. However, the authors do acknowledge some limitations, such as the reliance on known object contact characteristics to generate reference force curves.
Additionally, while the Dual-CNN architecture with the physics-based mechanics module appears to be a novel and effective solution, the paper does not provide a detailed analysis of its inner workings or compare it to other potential architectures that could be used for this task.
Further research could explore ways to relax the requirement for known object properties, perhaps by incorporating more advanced sensing or modeling techniques. Investigating the generalizability of the approach to a wider range of object types and grasping scenarios would also be valuable.
Conclusion
This paper presents a promising approach for enabling robots to grasp objects as gently and effectively as human hands, using limited training data. By leveraging known object contact characteristics and a novel neural network architecture, the researchers have developed a system that can accurately predict the target grasping forces and enable stable, vision-based tactile grasping.
If further refined and expanded, this technology could have significant implications for a wide range of robotics applications, from delicate handling of fragile objects to safe and efficient robot-human collaboration in industrial and home settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
❗
0
Learning Gentle Grasping from Human-Free Force Control Demonstration
Mingxuan Li, Lunwei Zhang, Tiemin Li, Yao Jiang
Humans can steadily and gently grasp unfamiliar objects based on tactile perception. Robots still face challenges in achieving similar performance due to the difficulty of learning accurate grasp-force predictions and force control strategies that can be generalized from limited data. In this article, we propose an approach for learning grasping from ideal force control demonstrations, to achieve similar performance of human hands with limited data size. Our approach utilizes objects with known contact characteristics to automatically generate reference force curves without human demonstrations. In addition, we design the dual convolutional neural networks (Dual-CNN) architecture which incorporating a physics-based mechanics module for learning target grasping force predictions from demonstrations. The described method can be effectively applied in vision-based tactile sensors and enables gentle and stable grasping of objects from the ground. The described prediction model and grasping strategy were validated in offline evaluations and online experiments, and the accuracy and generalizability were demonstrated.
Read more9/17/2024

0
Gravity-aware Grasp Generation with Implicit Grasp Mode Selection for Underactuated Hands
Tianyi Ko, Takuya Ikeda, Thomas Stewart, Robert Lee, Koichi Nishiwaki
Learning-based grasp detectors typically assume a precision grasp, where each finger only has one contact point, and estimate the grasp probability. In this work, we propose a data generation and learning pipeline that can leverage power grasping, which has more contact points with an enveloping configuration and is robust against both positioning error and force disturbance. To train a grasp detector to prioritize power grasping while still keeping precision grasping as the secondary choice, we propose to train the network against the magnitude of disturbance in the gravity direction a grasp can resist (gravity-rejection score) rather than the binary classification of success. We also provide an efficient data generation pipeline for a dataset with gravity-rejection score annotation. In addition to thorough ablation studies, quantitative evaluation in both simulation and real-robot clarifies the significant improvement in our approach, especially when the objects are heavy.
Read more8/14/2024
0
Grasping Diverse Objects with Simulated Humanoids
Zhengyi Luo, Jinkun Cao, Sammy Christen, Alexander Winkler, Kris Kitani, Weipeng Xu
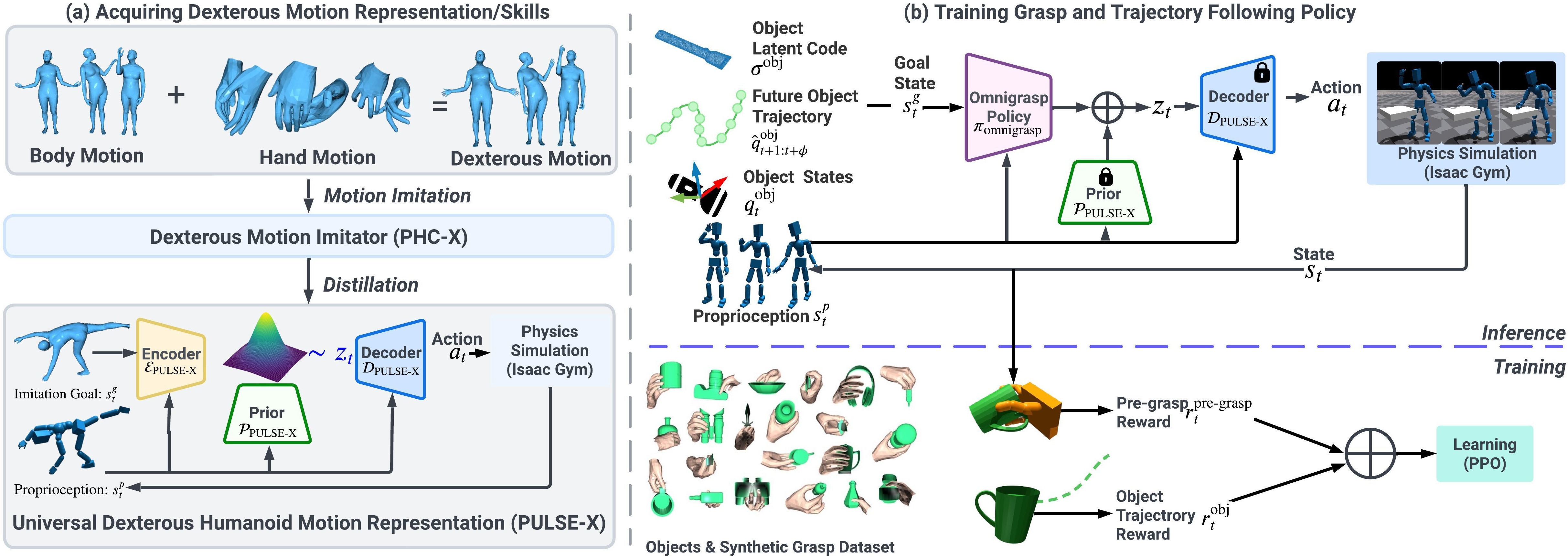
We present a method for controlling a simulated humanoid to grasp an object and move it to follow an object trajectory. Due to the challenges in controlling a humanoid with dexterous hands, prior methods often use a disembodied hand and only consider vertical lifts or short trajectories. This limited scope hampers their applicability for object manipulation required for animation and simulation. To close this gap, we learn a controller that can pick up a large number (>1200) of objects and carry them to follow randomly generated trajectories. Our key insight is to leverage a humanoid motion representation that provides human-like motor skills and significantly speeds up training. Using only simplistic reward, state, and object representations, our method shows favorable scalability on diverse object and trajectories. For training, we do not need dataset of paired full-body motion and object trajectories. At test time, we only require the object mesh and desired trajectories for grasping and transporting. To demonstrate the capabilities of our method, we show state-of-the-art success rates in following object trajectories and generalizing to unseen objects. Code and models will be released.
Read more7/17/2024
0
Learning Force Control for Legged Manipulation
Tifanny Portela, Gabriel B. Margolis, Yandong Ji, Pulkit Agrawal
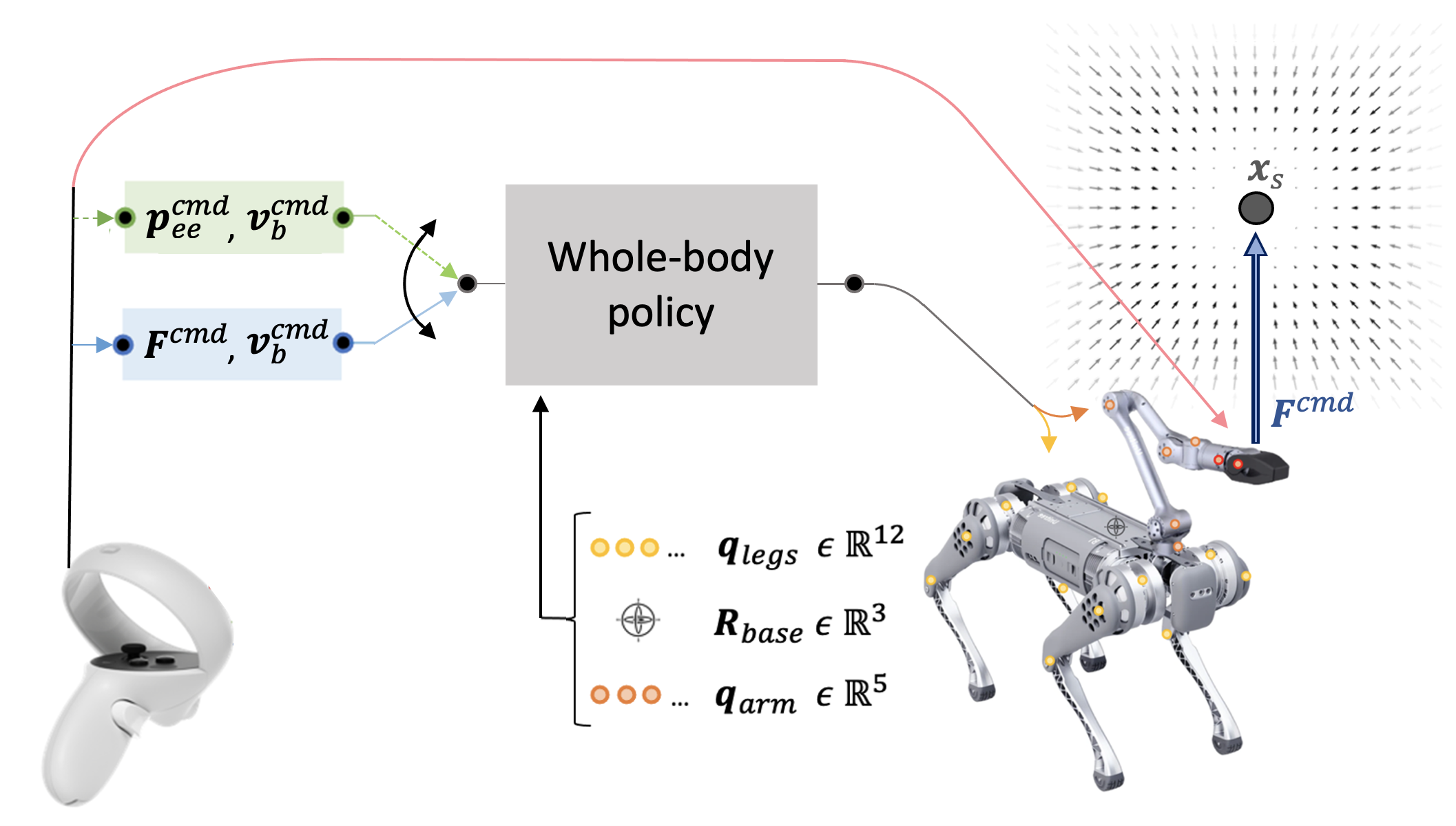
Controlling contact forces during interactions is critical for locomotion and manipulation tasks. While sim-to-real reinforcement learning (RL) has succeeded in many contact-rich problems, current RL methods achieve forceful interactions implicitly without explicitly regulating forces. We propose a method for training RL policies for direct force control without requiring access to force sensing. We showcase our method on a whole-body control platform of a quadruped robot with an arm. Such force control enables us to perform gravity compensation and impedance control, unlocking compliant whole-body manipulation. The learned whole-body controller with variable compliance makes it intuitive for humans to teleoperate the robot by only commanding the manipulator, and the robot's body adjusts automatically to achieve the desired position and force. Consequently, a human teleoperator can easily demonstrate a wide variety of loco-manipulation tasks. To the best of our knowledge, we provide the first deployment of learned whole-body force control in legged manipulators, paving the way for more versatile and adaptable legged robots.
Read more5/21/2024