Learning Granularity-Aware Affordances from Human-Object Interaction for Tool-Based Functional Grasping in Dexterous Robotics

0

Sign in to get full access
Overview
• This paper explores the problem of dexterous grasping and tool-based functional grasping in robotics.
• The researchers propose a method for learning granularity-aware affordances from human-object interactions, which can be used to enable dexterous robotic hands to perform fine-grained grasping and tool-based manipulation.
• The key idea is to leverage human demonstrations of tool use and object interactions to build an understanding of the different "granularity levels" of how objects can be grasped and manipulated, from coarse to fine-grained.
• This granularity-aware affordance model can then be used to guide a dexterous robotic hand in generating appropriate grasps for tool use and other dexterous manipulation tasks.
Plain English Explanation
The paper is about teaching robots to use tools and manipulate objects in a very precise and dexterous way, similar to how humans do it. Robots today can pick up and move objects, but they often struggle with more complex tasks that require fine motor control, like using a screwdriver or writing with a pen.
The researchers wanted to enable robots to learn from watching how humans interact with objects and tools. By observing the different ways people grasp and manipulate things, the robots can build an understanding of the different "levels" of how objects can be handled - from coarse, whole-hand grasps to very precise, finger-level control.
With this knowledge of "granularity-aware affordances," the robot can then figure out the best way to grasp an object or tool to accomplish a particular task, just like a human would. This allows the robot to perform dexterous, multi-fingered grasping and manipulation in a more human-like way, opening up new possibilities for how robots can assist and collaborate with people.
Technical Explanation
The core of the proposed approach is a method for learning granularity-aware affordances from human demonstrations of object interactions and tool use. The researchers collect a dataset of human hand-object interactions, capturing the different ways people grasp and manipulate objects at varying levels of precision.
From this data, they train a deep neural network model that can predict the appropriate "granularity level" of grasp and manipulation for a given object and task. This granularity-aware affordance model encodes information about coarse, whole-hand grasps as well as fine, finger-level control.
The researchers then integrate this affordance model into a dexterous robotic hand system, allowing the robot to generate appropriate grasps and manipulation strategies for tool use and other functional tasks. Through experiments, they demonstrate the robot's ability to perform fine-grained, tool-based interactions that would be challenging for more traditional robotic grasping approaches.
Critical Analysis
The key strength of this research is its focus on enabling dexterous, tool-based manipulation in robots through the learning of granularity-aware affordances from human demonstrations. This is an important step towards developing more capable and versatile robot assistants that can interact with the world in a more natural, human-like way.
That said, the paper does not address some potential limitations and areas for future work. For example, the dataset of human demonstrations is relatively small and may not capture the full range of possible object interactions. Additionally, the proposed method relies on having a high-quality, dexterous robotic hand, which can be expensive and challenging to implement in real-world applications.
Further research could explore ways to scale the affordance learning approach to larger and more diverse datasets, as well as investigate how to make the system more robust and transferable to different hardware platforms. Exploring the integration of this work with other advances in robotic grasping and manipulation could also be a fruitful direction for future work.
Conclusion
This paper presents a novel approach for enabling dexterous, tool-based manipulation in robots through the learning of granularity-aware affordances from human demonstrations. By capturing the different levels of precision and control that humans employ when interacting with objects, the researchers have developed a system that allows robots to perform more natural and versatile grasping and manipulation tasks.
While there are still some challenges to overcome, this research represents an important step towards the development of more capable and human-like robot assistants that can seamlessly integrate into our everyday lives and collaborate with us on a wide range of tasks. As the field of robotics continues to advance, techniques like this will play a crucial role in bridging the gap between human and machine dexterity.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning Granularity-Aware Affordances from Human-Object Interaction for Tool-Based Functional Grasping in Dexterous Robotics
Fan Yang, Wenrui Chen, Kailun Yang, Haoran Lin, DongSheng Luo, Conghui Tang, Zhiyong Li, Yaonan Wang
To enable robots to use tools, the initial step is teaching robots to employ dexterous gestures for touching specific areas precisely where tasks are performed. Affordance features of objects serve as a bridge in the functional interaction between agents and objects. However, leveraging these affordance cues to help robots achieve functional tool grasping remains unresolved. To address this, we propose a granularity-aware affordance feature extraction method for locating functional affordance areas and predicting dexterous coarse gestures. We study the intrinsic mechanisms of human tool use. On one hand, we use fine-grained affordance features of object-functional finger contact areas to locate functional affordance regions. On the other hand, we use highly activated coarse-grained affordance features in hand-object interaction regions to predict grasp gestures. Additionally, we introduce a model-based post-processing module that includes functional finger coordinate localization, finger-to-end coordinate transformation, and force feedback-based coarse-to-fine grasping. This forms a complete dexterous robotic functional grasping framework GAAF-Dex, which learns Granularity-Aware Affordances from human-object interaction for tool-based Functional grasping in Dexterous Robotics. Unlike fully-supervised methods that require extensive data annotation, we employ a weakly supervised approach to extract relevant cues from exocentric (Exo) images of hand-object interactions to supervise feature extraction in egocentric (Ego) images. We have constructed a small-scale dataset, FAH, which includes near 6K images of functional hand-object interaction Exo- and Ego images of 18 commonly used tools performing 6 tasks. Extensive experiments on the dataset demonstrate our method outperforms state-of-the-art methods. The code will be made publicly available at https://github.com/yangfan293/GAAF-DEX.
Read more7/2/2024

0
Learning Precise Affordances from Egocentric Videos for Robotic Manipulation
Gen Li, Nikolaos Tsagkas, Jifei Song, Ruaridh Mon-Williams, Sethu Vijayakumar, Kun Shao, Laura Sevilla-Lara
Affordance, defined as the potential actions that an object offers, is crucial for robotic manipulation tasks. A deep understanding of affordance can lead to more intelligent AI systems. For example, such knowledge directs an agent to grasp a knife by the handle for cutting and by the blade when passing it to someone. In this paper, we present a streamlined affordance learning system that encompasses data collection, effective model training, and robot deployment. First, we collect training data from egocentric videos in an automatic manner. Different from previous methods that focus only on the object graspable affordance and represent it as coarse heatmaps, we cover both graspable (e.g., object handles) and functional affordances (e.g., knife blades, hammer heads) and extract data with precise segmentation masks. We then propose an effective model, termed Geometry-guided Affordance Transformer (GKT), to train on the collected data. GKT integrates an innovative Depth Feature Injector (DFI) to incorporate 3D shape and geometric priors, enhancing the model's understanding of affordances. To enable affordance-oriented manipulation, we further introduce Aff-Grasp, a framework that combines GKT with a grasp generation model. For comprehensive evaluation, we create an affordance evaluation dataset with pixel-wise annotations, and design real-world tasks for robot experiments. The results show that GKT surpasses the state-of-the-art by 15.9% in mIoU, and Aff-Grasp achieves high success rates of 95.5% in affordance prediction and 77.1% in successful grasping among 179 trials, including evaluations with seen, unseen objects, and cluttered scenes.
Read more8/20/2024
🔎
0
Learning 6-DoF Fine-grained Grasp Detection Based on Part Affordance Grounding
Yaoxian Song, Penglei Sun, Piaopiao Jin, Yi Ren, Yu Zheng, Zhixu Li, Xiaowen Chu, Yue Zhang, Tiefeng Li, Jason Gu
Robotic grasping is a fundamental ability for a robot to interact with the environment. Current methods focus on how to obtain a stable and reliable grasping pose in object level, while little work has been studied on part (shape)-wise grasping which is related to fine-grained grasping and robotic affordance. Parts can be seen as atomic elements to compose an object, which contains rich semantic knowledge and a strong correlation with affordance. However, lacking a large part-wise 3D robotic dataset limits the development of part representation learning and downstream applications. In this paper, we propose a new large Language-guided SHape grAsPing datasEt (named LangSHAPE) to promote 3D part-level affordance and grasping ability learning. From the perspective of robotic cognition, we design a two-stage fine-grained robotic grasping framework (named LangPartGPD), including a novel 3D part language grounding model and a part-aware grasp pose detection model, in which explicit language input from human or large language models (LLMs) could guide a robot to generate part-level 6-DoF grasping pose with textual explanation. Our method combines the advantages of human-robot collaboration and LLMs' planning ability using explicit language as a symbolic intermediate. To evaluate the effectiveness of our proposed method, we perform 3D part grounding and fine-grained grasp detection experiments on both simulation and physical robot settings, following language instructions across different degrees of textual complexity. Results show our method achieves competitive performance in 3D geometry fine-grained grounding, object affordance inference, and 3D part-aware grasping tasks. Our dataset and code are available on our project website https://sites.google.com/view/lang-shape
Read more6/17/2024
0
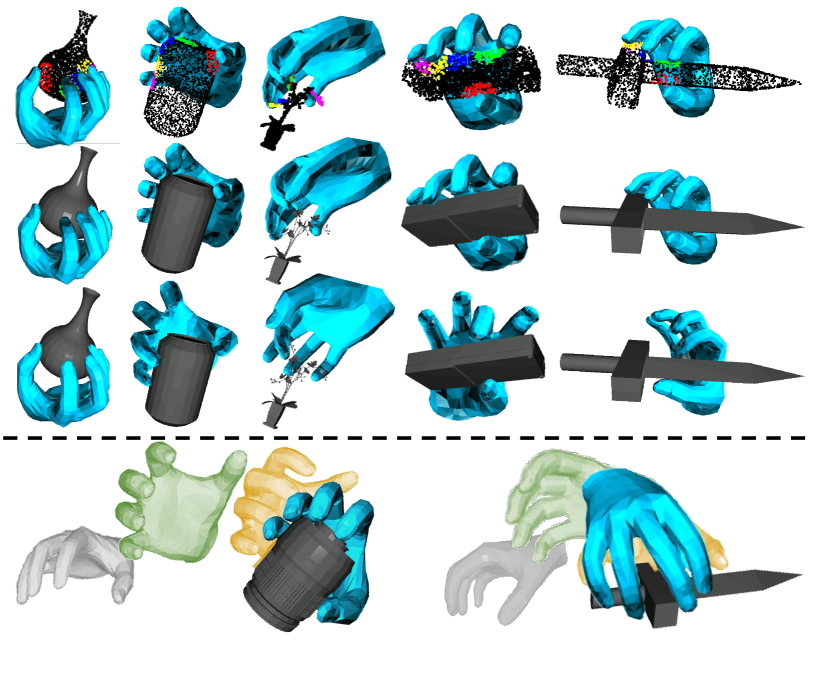
GrainGrasp: Dexterous Grasp Generation with Fine-grained Contact Guidance
Fuqiang Zhao, Dzmitry Tsetserukou, Qian Liu
One goal of dexterous robotic grasping is to allow robots to handle objects with the same level of flexibility and adaptability as humans. However, it remains a challenging task to generate an optimal grasping strategy for dexterous hands, especially when it comes to delicate manipulation and accurate adjustment the desired grasping poses for objects of varying shapes and sizes. In this paper, we propose a novel dexterous grasp generation scheme called GrainGrasp that provides fine-grained contact guidance for each fingertip. In particular, we employ a generative model to predict separate contact maps for each fingertip on the object point cloud, effectively capturing the specifics of finger-object interactions. In addition, we develop a new dexterous grasping optimization algorithm that solely relies on the point cloud as input, eliminating the necessity for complete mesh information of the object. By leveraging the contact maps of different fingertips, the proposed optimization algorithm can generate precise and determinable strategies for human-like object grasping. Experimental results confirm the efficiency of the proposed scheme.
Read more5/17/2024