Learning Interactive Real-World Simulators

0
📉
Sign in to get full access
Overview
- Generative models trained on internet data have revolutionized how text, image, and video content can be created.
- The next milestone for generative models may be simulating realistic experiences in response to actions taken by humans, robots, and other interactive agents.
- This could enable applications like controllable content creation in games and movies, and training embodied agents that can be directly deployed in the real world.
Plain English Explanation
The paper explores the possibility of learning a universal simulator (UniSim) that can simulate realistic real-world interactions. This could allow for creating content like games and movies where the visuals and outcomes respond dynamically to user actions. It could also enable training virtual agents in simulation before deploying them in the real world.
The key insight is that existing datasets, while rich in different ways (e.g., lots of objects in image data, dense action sampling in robotics data, diverse movements in navigation data), can be combined to create a comprehensive simulation of real-world experiences. With careful orchestration of these diverse datasets, the simulator can generate visual outcomes for both high-level instructions (like "open the drawer") and low-level controls.
This simulated experience can then be used to train various types of intelligent systems, from high-level vision-language policies to low-level reinforcement learning controllers. These trained models can then be directly deployed in the real world without any additional training, since they have already learned from the simulated data.
The paper also shows that other types of AI models, like video captioning, can benefit from training on the simulated experiences generated by the universal simulator.
Technical Explanation
The key technical contribution of this work is the development of a universal simulator (UniSim) that can generate realistic simulations of real-world interactions. The authors leverage the complementary strengths of diverse datasets, each capturing different aspects of the real world, to create a comprehensive simulation environment.
For example, image datasets provide a wealth of information about object appearances and spatial relationships, robotics datasets offer dense sampling of actions and their consequences, and navigation data captures diverse movements and interactions. By carefully orchestrating these heterogeneous datasets, the UniSim model is able to simulate the visual outcomes of both high-level instructions (e.g., "open the drawer") and low-level control signals.
The authors then demonstrate the utility of this universal simulator by using it to train two types of intelligent agents:
-
High-level vision-language policies: These models learn to map natural language instructions to appropriate actions, and can be deployed in the real world without any additional training.
-
Low-level reinforcement learning policies: These controllers learn to execute fine-grained actions, also in a zero-shot manner after training purely in simulation.
Additionally, the authors show that other types of AI models, such as video captioning systems, can benefit from training on the simulated experiences generated by UniSim.
Critical Analysis
The paper presents a promising direction for the field of generative models, exploring their potential to simulate realistic real-world experiences. The key strength of the proposed UniSim approach is its ability to leverage diverse datasets to create a comprehensive simulation environment.
However, the paper does not address several important limitations and open questions:
-
Dataset Bias: The quality and realism of the simulations generated by UniSim are inherently limited by the biases and gaps present in the underlying datasets. Ensuring the simulator's robustness to such biases is an important area for future research.
-
Generalization Capability: While the zero-shot transfer of policies trained in simulation to the real world is impressive, the extent of this generalization and its limitations are not thoroughly explored. Evaluating the agents' performance in a wider range of real-world scenarios would be valuable.
-
Computational Complexity: Training and running a universal simulator of the scale described in the paper likely requires significant computational resources. The authors do not provide details on the training time and inference latency of the UniSim model, which are important practical considerations.
-
Safety and Robustness: When deploying agents trained purely in simulation, ensuring their safety and robustness in the real world is crucial. The paper does not address potential issues related to sim-to-real transfer, such as distributional shift and the handling of unexpected situations.
Despite these limitations, the work represents an exciting step towards more realistic and interactive simulations, with the potential to transform how we create content and train intelligent agents. Further research in this direction, addressing the highlighted challenges, could lead to significant advancements in the field.
Conclusion
The paper presents a novel approach to learning a universal simulator (UniSim) that can generate realistic simulations of real-world interactions. By carefully orchestrating diverse datasets, the UniSim model is able to simulate the visual outcomes of both high-level instructions and low-level control signals.
This simulated experience can then be used to train various types of intelligent systems, including vision-language policies and reinforcement learning controllers, which can be directly deployed in the real world without any additional training. The authors also demonstrate that other AI models, such as video captioning, can benefit from training on the simulated experiences generated by UniSim.
While the paper highlights several important limitations and open questions, the proposed approach represents an exciting step towards more realistic and interactive simulations. Further research in this direction could lead to significant advancements in areas like content creation, agent training, and the broader field of generative AI.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📉
0
Learning Interactive Real-World Simulators
Sherry Yang, Yilun Du, Kamyar Ghasemipour, Jonathan Tompson, Leslie Kaelbling, Dale Schuurmans, Pieter Abbeel
Generative models trained on internet data have revolutionized how text, image, and video content can be created. Perhaps the next milestone for generative models is to simulate realistic experience in response to actions taken by humans, robots, and other interactive agents. Applications of a real-world simulator range from controllable content creation in games and movies, to training embodied agents purely in simulation that can be directly deployed in the real world. We explore the possibility of learning a universal simulator (UniSim) of real-world interaction through generative modeling. We first make the important observation that natural datasets available for learning a real-world simulator are often rich along different dimensions (e.g., abundant objects in image data, densely sampled actions in robotics data, and diverse movements in navigation data). With careful orchestration of diverse datasets, each providing a different aspect of the overall experience, we can simulate the visual outcome of both high-level instructions such as open the drawer and low-level controls from otherwise static scenes and objects. We use the simulator to train both high-level vision-language policies and low-level reinforcement learning policies, each of which can be deployed in the real world in zero shot after training purely in simulation. We also show that other types of intelligence such as video captioning models can benefit from training with simulated experience, opening up even wider applications. Video demos can be found at https://universal-simulator.github.io.
Read more9/27/2024
0
IRASim: Learning Interactive Real-Robot Action Simulators
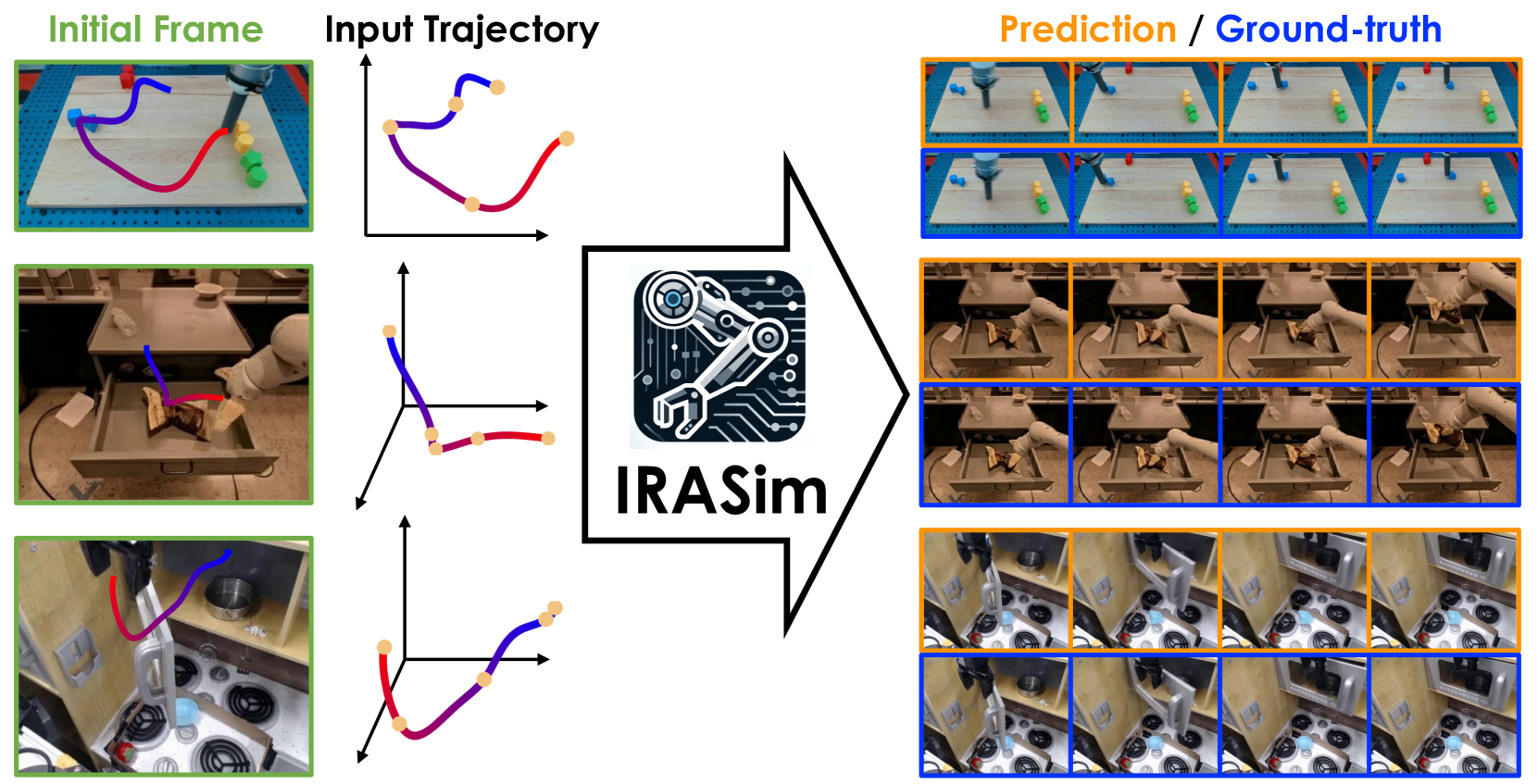
Fangqi Zhu, Hongtao Wu, Song Guo, Yuxiao Liu, Chilam Cheang, Tao Kong
Scalable robot learning in the real world is limited by the cost and safety issues of real robots. In addition, rolling out robot trajectories in the real world can be time-consuming and labor-intensive. In this paper, we propose to learn an interactive real-robot action simulator as an alternative. We introduce a novel method, IRASim, which leverages the power of generative models to generate extremely realistic videos of a robot arm that executes a given action trajectory, starting from an initial given frame. To validate the effectiveness of our method, we create a new benchmark, IRASim Benchmark, based on three real-robot datasets and perform extensive experiments on the benchmark. Results show that IRASim outperforms all the baseline methods and is more preferable in human evaluations. We hope that IRASim can serve as an effective and scalable approach to enhance robot learning in the real world. To promote research for generative real-robot action simulators, we open-source code, benchmark, and checkpoints at https: //gen-irasim.github.io.
Read more6/21/2024
0
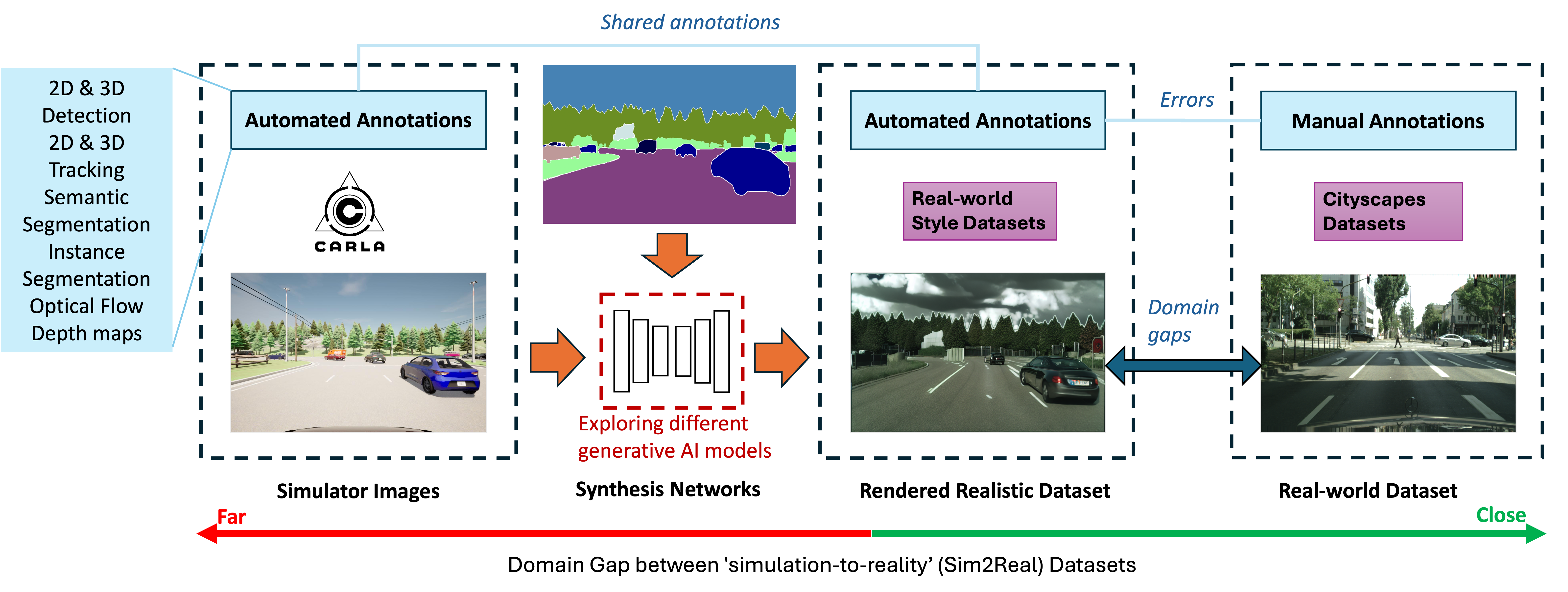
Exploring Generative AI for Sim2Real in Driving Data Synthesis
Haonan Zhao, Yiting Wang, Thomas Bashford-Rogers, Valentina Donzella, Kurt Debattista
Datasets are essential for training and testing vehicle perception algorithms. However, the collection and annotation of real-world images is time-consuming and expensive. Driving simulators offer a solution by automatically generating various driving scenarios with corresponding annotations, but the simulation-to-reality (Sim2Real) domain gap remains a challenge. While most of the Generative Artificial Intelligence (AI) follows the de facto Generative Adversarial Nets (GANs)-based methods, the recent emerging diffusion probabilistic models have not been fully explored in mitigating Sim2Real challenges for driving data synthesis. To explore the performance, this paper applied three different generative AI methods to leverage semantic label maps from a driving simulator as a bridge for the creation of realistic datasets. A comparative analysis of these methods is presented from the perspective of image quality and perception. New synthetic datasets, which include driving images and auto-generated high-quality annotations, are produced with low costs and high scene variability. The experimental results show that although GAN-based methods are adept at generating high-quality images when provided with manually annotated labels, ControlNet produces synthetic datasets with fewer artefacts and more structural fidelity when using simulator-generated labels. This suggests that the diffusion-based approach may provide improved stability and an alternative method for addressing Sim2Real challenges.
Read more4/16/2024
📊
0
RoboGen: Towards Unleashing Infinite Data for Automated Robot Learning via Generative Simulation
Yufei Wang, Zhou Xian, Feng Chen, Tsun-Hsuan Wang, Yian Wang, Katerina Fragkiadaki, Zackory Erickson, David Held, Chuang Gan
We present RoboGen, a generative robotic agent that automatically learns diverse robotic skills at scale via generative simulation. RoboGen leverages the latest advancements in foundation and generative models. Instead of directly using or adapting these models to produce policies or low-level actions, we advocate for a generative scheme, which uses these models to automatically generate diversified tasks, scenes, and training supervisions, thereby scaling up robotic skill learning with minimal human supervision. Our approach equips a robotic agent with a self-guided propose-generate-learn cycle: the agent first proposes interesting tasks and skills to develop, and then generates corresponding simulation environments by populating pertinent objects and assets with proper spatial configurations. Afterwards, the agent decomposes the proposed high-level task into sub-tasks, selects the optimal learning approach (reinforcement learning, motion planning, or trajectory optimization), generates required training supervision, and then learns policies to acquire the proposed skill. Our work attempts to extract the extensive and versatile knowledge embedded in large-scale models and transfer them to the field of robotics. Our fully generative pipeline can be queried repeatedly, producing an endless stream of skill demonstrations associated with diverse tasks and environments.
Read more6/18/2024