Learning Linear Dynamics from Bilinear Observations

0
Sign in to get full access
Overview
- The paper introduces a method for learning linear dynamical systems from bilinear observations.
- It proposes a novel approach to recover the underlying linear dynamics from data that is quadratically observed.
- The method can be applied to various real-world problems where the observed data is a nonlinear function of the system state.
Plain English Explanation
In many real-world scenarios, the data we observe is a nonlinear function of the underlying system state. For example, in robot motion planning, the sensors may measure a combination of the robot's position and velocity rather than the individual components directly.
The key idea in this paper is to develop a method that can recover the linear dynamics of the system from this bilinear (quadratic) observation data. The authors propose a novel approach that can accurately estimate the underlying linear dynamics, even when the observed data is a nonlinear function of the system state.
This method has important applications in areas like control systems, system identification, and latent variable modeling, where the observed data may not directly reflect the true system dynamics.
Technical Explanation
The authors consider a linear dynamical system where the system state evolves according to a linear equation, but the observed data is a bilinear (quadratic) function of the state. Specifically, the observation at each time step is a matrix that is the outer product of the state vector.
To recover the underlying linear dynamics, the authors propose a two-stage approach. First, they use the bilinear observation data to estimate a matrix that captures the correlations between the state and the observed matrix. Then, they use this estimated correlation matrix to recover the parameters of the linear dynamical system.
The key technical insights are:
- The authors show that the linear dynamics can be recovered from the correlation matrix, even when the observations are bilinear.
- They provide a computationally efficient algorithm to estimate the correlation matrix from the bilinear observation data.
- They prove theoretical guarantees on the accuracy of the estimated linear dynamics under certain assumptions.
The authors demonstrate the effectiveness of their approach through experiments on synthetic data and real-world applications, such as Gaussian process learning of nonlinear dynamics.
Critical Analysis
The paper presents a novel and technically sound approach for learning linear dynamics from bilinear observations. The authors provide strong theoretical guarantees and demonstrate the method's effectiveness on various examples.
However, the main limitation of the approach is that it assumes the underlying dynamics are linear. In many real-world systems, the true dynamics may be nonlinear, and a linear approximation may not capture the full complexity of the system.
Additionally, the method requires the bilinear observation model to be known a priori, which may not always be the case in practice. Extending the approach to handle more general nonlinear observation models could further enhance its applicability.
Future research could explore ways to relax the linearity assumption, perhaps by incorporating techniques from nonlinear system identification or latent variable modeling. Additionally, developing methods to learn the observation model from data could make the approach more widely applicable.
Conclusion
This paper presents a novel method for learning linear dynamical systems from bilinear observations, a common scenario in many real-world applications. The authors' two-stage approach effectively recovers the underlying linear dynamics, even when the observed data is a nonlinear function of the system state.
While the method has limitations in terms of the linearity assumption and the requirement of a known observation model, it represents an important step forward in addressing the challenge of system identification from nonlinear data. The insights and techniques developed in this work could have broader implications for areas like control systems, robotics, and latent variable modeling, where dealing with nonlinear observations is a prevalent issue.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning Linear Dynamics from Bilinear Observations
Yahya Sattar, Yassir Jedra, Sarah Dean
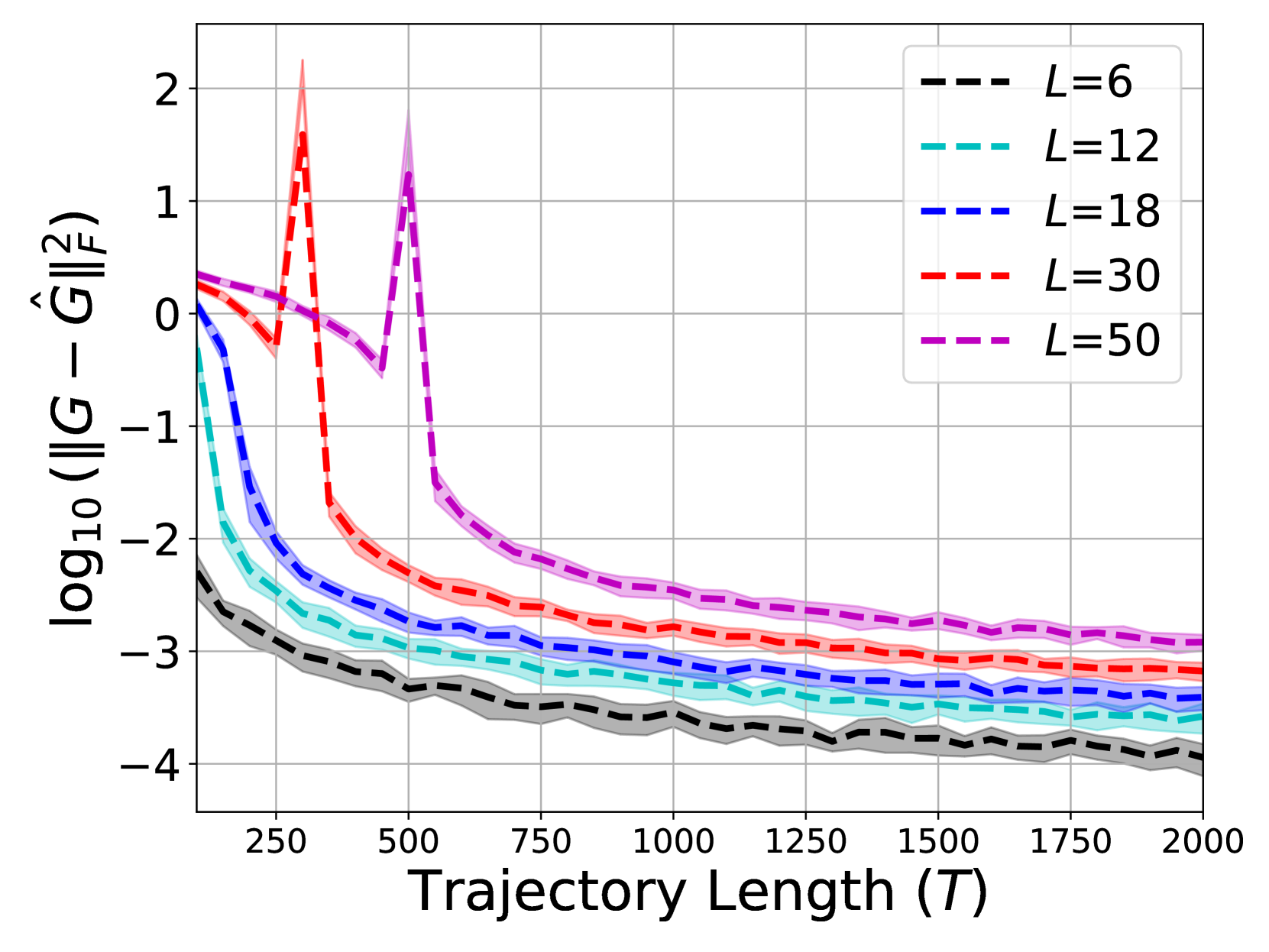
We consider the problem of learning a realization of a partially observed dynamical system with linear state transitions and bilinear observations. Under very mild assumptions on the process and measurement noises, we provide a finite time analysis for learning the unknown dynamics matrices (up to a similarity transform). Our analysis involves a regression problem with heavy-tailed and dependent data. Moreover, each row of our design matrix contains a Kronecker product of current input with a history of inputs, making it difficult to guarantee persistence of excitation. We overcome these challenges, first providing a data-dependent high probability error bound for arbitrary but fixed inputs. Then, we derive a data-independent error bound for inputs chosen according to a simple random design. Our main results provide an upper bound on the statistical error rates and sample complexity of learning the unknown dynamics matrices from a single finite trajectory of bilinear observations.
Read more9/26/2024

0
Learning Unstable Continuous-Time Stochastic Linear Control Systems
Reza Sadeghi Hafshejani, Mohamad Kazem Shirani Fradonbeh
We study the problem of system identification for stochastic continuous-time dynamics, based on a single finite-length state trajectory. We present a method for estimating the possibly unstable open-loop matrix by employing properly randomized control inputs. Then, we establish theoretical performance guarantees showing that the estimation error decays with trajectory length, a measure of excitability, and the signal-to-noise ratio, while it grows with dimension. Numerical illustrations that showcase the rates of learning the dynamics, will be provided as well. To perform the theoretical analysis, we develop new technical tools that are of independent interest. That includes non-asymptotic stochastic bounds for highly non-stationary martingales and generalized laws of iterated logarithms, among others.
Read more9/18/2024
📊
0
Learning Dynamical Systems by Leveraging Data from Similar Systems
Lei Xin, Lintao Ye, George Chiu, Shreyas Sundaram
We consider the problem of learning the dynamics of a linear system when one has access to data generated by an auxiliary system that shares similar (but not identical) dynamics, in addition to data from the true system. We use a weighted least squares approach, and provide finite sample error bounds of the learned model as a function of the number of samples and various system parameters from the two systems as well as the weight assigned to the auxiliary data. We show that the auxiliary data can help to reduce the intrinsic system identification error due to noise, at the price of adding a portion of error that is due to the differences between the two system models. We further provide a data-dependent bound that is computable when some prior knowledge about the systems, such as upper bounds on noise levels and model difference, is available. This bound can also be used to determine the weight that should be assigned to the auxiliary data during the model training stage.
Read more5/27/2024
0
Gaussian process learning of nonlinear dynamics
Dongwei Ye, Mengwu Guo
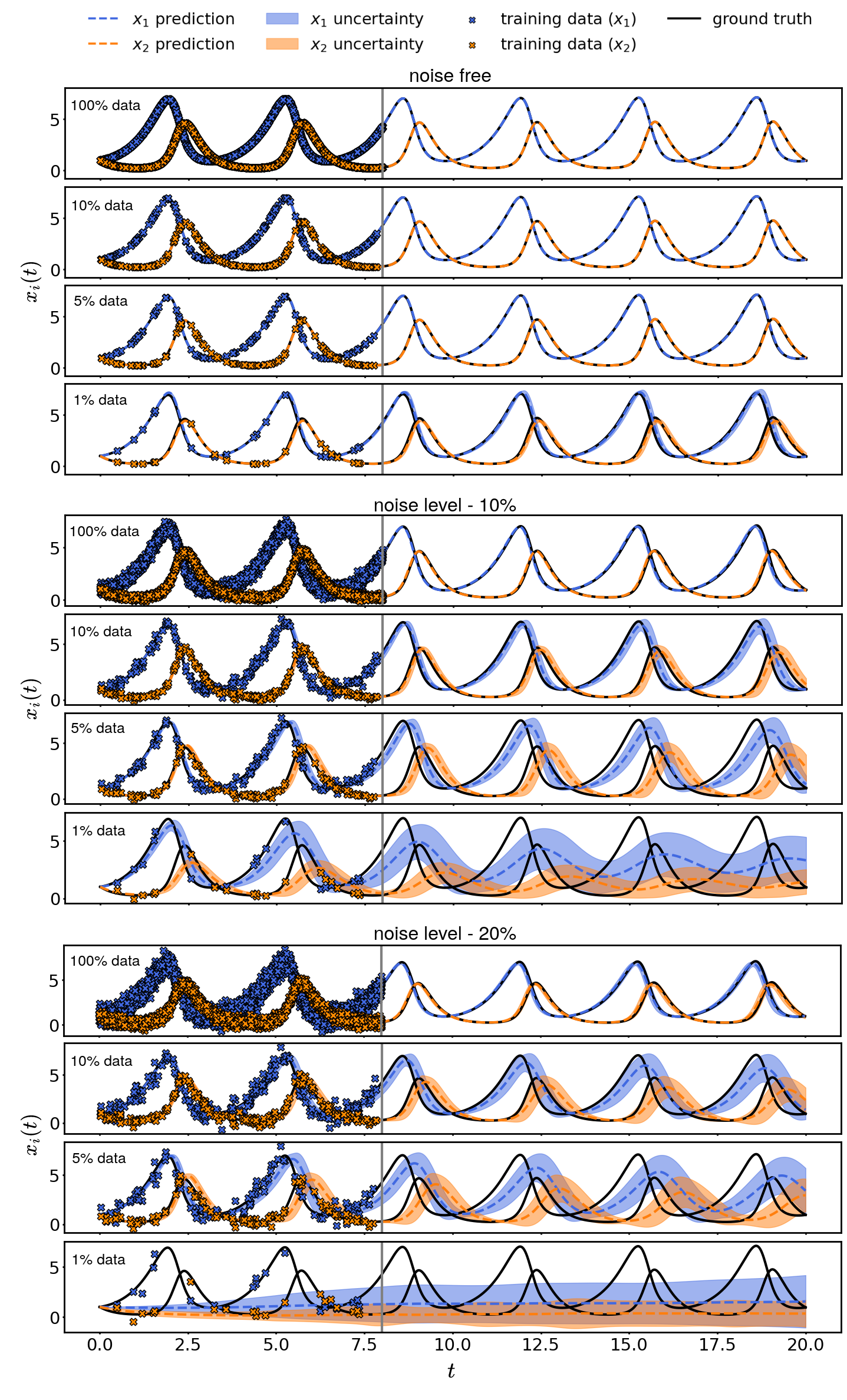
One of the pivotal tasks in scientific machine learning is to represent underlying dynamical systems from time series data. Many methods for such dynamics learning explicitly require the derivatives of state data, which are not directly available and can be approximated conventionally by finite differences. However, the discrete approximations of time derivatives may result in poor estimations when state data are scarce and/or corrupted by noise, thus compromising the predictiveness of the learned dynamical models. To overcome this technical hurdle, we propose a new method that learns nonlinear dynamics through a Bayesian inference of characterizing model parameters. This method leverages a Gaussian process representation of states, and constructs a likelihood function using the correlation between state data and their derivatives, yet prevents explicit evaluations of time derivatives. Through a Bayesian scheme, a probabilistic estimate of the model parameters is given by the posterior distribution, and thus a quantification is facilitated for uncertainties from noisy state data and the learning process. Specifically, we will discuss the applicability of the proposed method to several typical scenarios for dynamical systems: identification and estimation with an affine parametrization, nonlinear parametric approximation without prior knowledge, and general parameter estimation for a given dynamical system.
Read more4/17/2024