A Safety-Oriented Self-Learning Algorithm for Autonomous Driving: Evolution Starting from a Basic Model

0
Sign in to get full access
Overview
- Autonomous driving is a complex challenge that requires robust decision-making algorithms.
- This paper presents a safety-oriented self-learning algorithm for autonomous driving.
- The algorithm starts from a basic model and evolves over time to improve safety and performance.
Plain English Explanation
The paper describes a new algorithm for autonomous driving that aims to improve safety and decision-making. The key idea is to start with a simple, basic model and then gradually evolve and refine it over time through a self-learning process.
The algorithm is designed to be <a href="https://aimodels.fyi/papers/arxiv/safe-efficient-self-evolving-algorithm-decision-making">safe and efficient</a>, constantly adapting and improving itself based on real-world driving experiences. This allows the autonomous vehicle to become more capable and <a href="https://aimodels.fyi/papers/arxiv/accelerating-evolution-personalized-automated-lane-change-through">personalized</a> over time, without requiring extensive manual intervention or reprogramming.
The key innovation is the self-learning aspect, where the algorithm can <a href="https://aimodels.fyi/papers/arxiv/autonomous-algorithm-training-autonomous-vehicles-minimal-human">autonomously train and evolve</a> itself with minimal human involvement. This makes the system more scalable and practical for real-world deployment of autonomous vehicles.
Technical Explanation
The paper presents a novel algorithm for autonomous driving that starts with a basic model and then <a href="https://aimodels.fyi/papers/arxiv/deep-reinforcement-learning-advanced-longitudinal-control-collision">evolves and improves itself over time</a> through a self-learning process.
The algorithm uses a combination of techniques, including deep learning and reinforcement learning, to continuously adapt and optimize its decision-making capabilities. It monitors the vehicle's performance and safety in real-world driving conditions, and then uses this feedback to update and refine the underlying model.
This self-learning approach allows the algorithm to become increasingly <a href="https://aimodels.fyi/papers/arxiv/towards-safe-robust-autonomous-vehicle-platooning-self">safe and robust</a> over time, without the need for extensive manual programming or intervention. The authors demonstrate the effectiveness of their approach through simulation experiments and real-world testing.
Critical Analysis
The paper presents a promising approach to improving the safety and performance of autonomous driving systems. The self-learning aspect is a key innovation that could make these systems more scalable and adaptable to diverse driving environments and conditions.
However, the paper does not address potential limitations or edge cases that could arise during real-world deployment. For example, the algorithm's ability to handle unexpected or novel situations, or its robustness to sensor failures or other system malfunctions, is not fully explored.
Additionally, the paper does not delve into the ethical implications of such a self-learning system, such as how it would handle moral dilemmas or how it could be held accountable for its decisions. These are important considerations that should be addressed in future research.
Overall, the paper provides a solid foundation for further development and refinement of this type of safety-oriented, self-learning algorithm for autonomous driving.
Conclusion
This paper presents a novel algorithm for autonomous driving that starts with a basic model and then evolves and improves itself over time through a self-learning process. The key innovation is the algorithm's ability to continuously adapt and optimize its decision-making capabilities based on real-world driving experiences, without the need for extensive manual intervention.
The self-learning approach holds promise for making autonomous driving systems more scalable, safe, and robust. While the paper does not address all potential limitations and concerns, it lays the groundwork for further advancements in this important field of research.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Safety-Oriented Self-Learning Algorithm for Autonomous Driving: Evolution Starting from a Basic Model
Shuo Yang, Caojun Wang, Zhenyu Ma, Yanjun Huang, Hong Chen
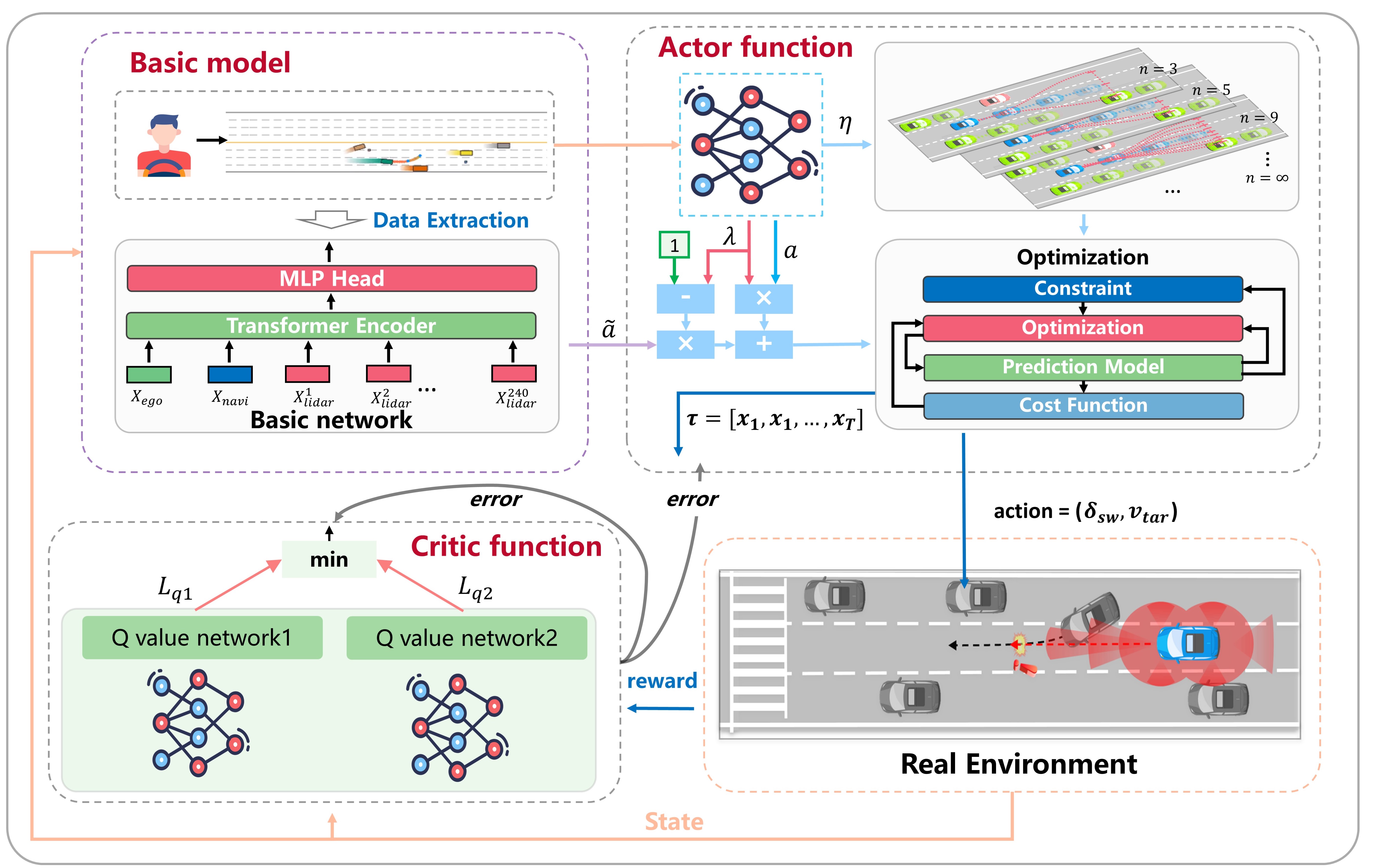
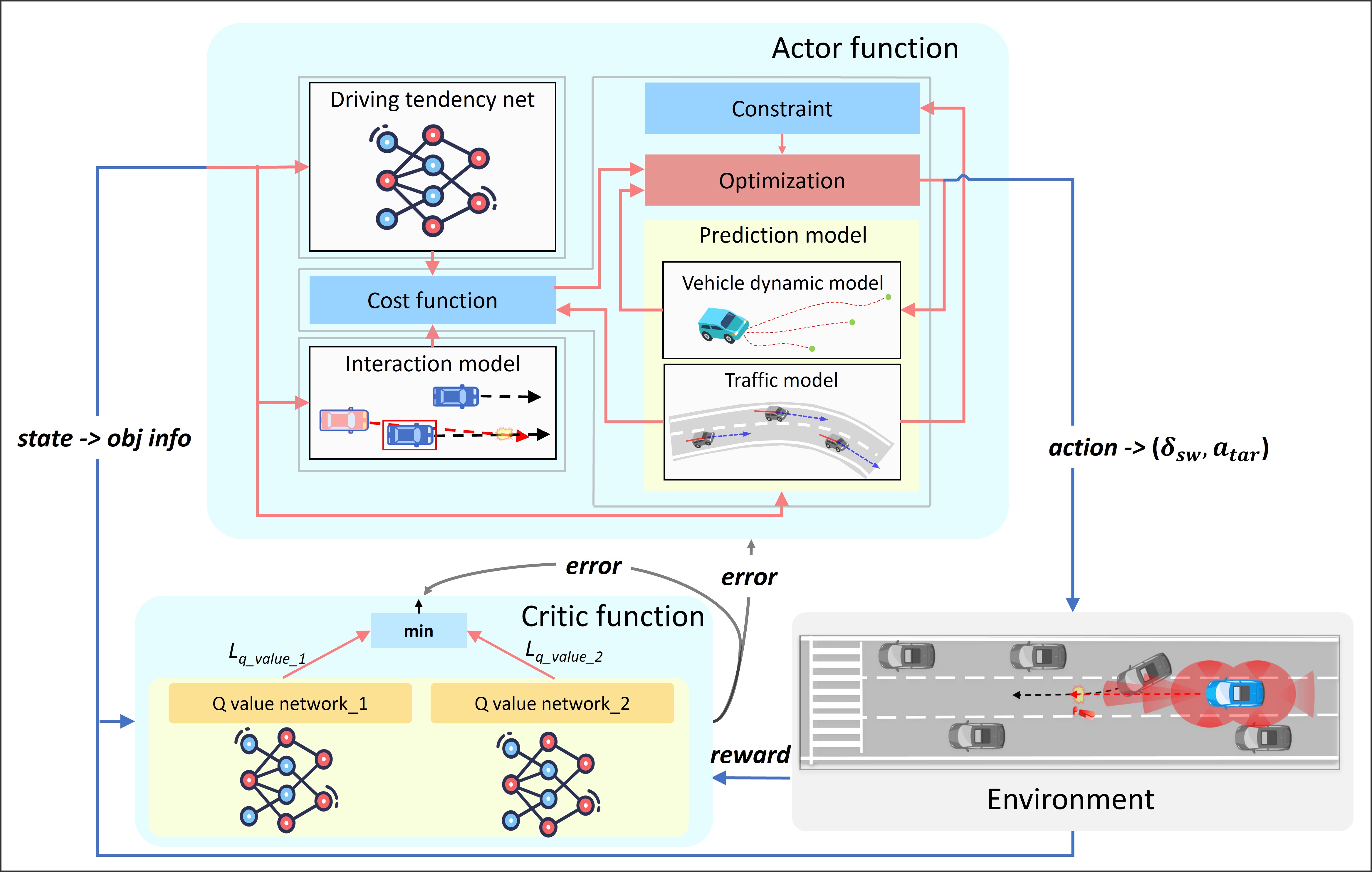
Autonomous driving vehicles with self-learning capabilities are expected to evolve in complex environments to improve their ability to cope with different scenarios. However, most self-learning algorithms suffer from low learning efficiency and lacking safety, which limits their applications. This paper proposes a safety-oriented self-learning algorithm for autonomous driving, which focuses on how to achieve evolution from a basic model. Specifically, a basic model based on the transformer encoder is designed to extract and output policy features from a small number of demonstration trajectories. To improve the learning efficiency, a policy mixed approach is developed. The basic model provides initial values to improve exploration efficiency, and the self-learning algorithm enhances the adaptability and generalization of the model, enabling continuous improvement without external intervention. Finally, an actor approximator based on receding horizon optimization is designed considering the constraints of the environmental input to ensure safety. The proposed method is verified in a challenging mixed traffic environment with pedestrians and vehicles. Simulation and real-vehicle test results show that the proposed method can safely and efficiently learn appropriate autonomous driving behaviors. Compared reinforcement learning and behavior cloning methods, it can achieve comprehensive improvement in learning efficiency and performance under the premise of ensuring safety.
Read more8/23/2024
0
A Safe and Efficient Self-evolving Algorithm for Decision-making and Control of Autonomous Driving Systems
Shuo Yang, Liwen Wang, Yanjun Huang, Hong Chen
Autonomous vehicles with a self-evolving ability are expected to cope with unknown scenarios in the real-world environment. Take advantage of trial and error mechanism, reinforcement learning is able to self evolve by learning the optimal policy, and it is particularly well suitable for solving decision-making problems. However, reinforcement learning suffers from safety issues and low learning efficiency, especially in the continuous action space. Therefore, the motivation of this paper is to address the above problem by proposing a hybrid Mechanism-Experience-Learning augmented approach. Specifically, to realize the efficient self-evolution, the driving tendency by analogy with human driving experience is proposed to reduce the search space of the autonomous driving problem, while the constrained optimization problem based on a mechanistic model is designed to ensure safety during the self-evolving process. Experimental results show that the proposed method is capable of generating safe and reasonable actions in various complex scenarios, improving the performance of the autonomous driving system. Compared to conventional reinforcement learning, the safety and efficiency of the proposed algorithm are greatly improved. The training process is collision-free, and the training time is equivalent to less than 10 minutes in the real world.
Read more8/23/2024

0
A Safe Self-evolution Algorithm for Autonomous Driving Based on Data-Driven Risk Quantification Model
Shuo Yang, Shizhen Li, Yanjun Huang, Hong Chen
Autonomous driving systems with self-evolution capabilities have the potential to independently evolve in complex and open environments, allowing to handle more unknown scenarios. However, as a result of the safety-performance trade-off mechanism of evolutionary algorithms, it is difficult to ensure safe exploration without sacrificing the improvement ability. This problem is especially prominent in dynamic traffic scenarios. Therefore, this paper proposes a safe self-evolution algorithm for autonomous driving based on data-driven risk quantification model. Specifically, a risk quantification model based on the attention mechanism is proposed by modeling the way humans perceive risks during driving, with the idea of achieving safety situation estimation of the surrounding environment through a data-driven approach. To prevent the impact of over-conservative safety guarding policies on the self-evolution capability of the algorithm, a safety-evolutionary decision-control integration algorithm with adjustable safety limits is proposed, and the proposed risk quantization model is integrated into it. Simulation and real-vehicle experiments results illustrate the effectiveness of the proposed method. The results show that the proposed algorithm can generate safe and reasonable actions in a variety of complex scenarios and guarantee safety without losing the evolutionary potential of learning-based autonomous driving systems.
Read more8/26/2024

0
Autonomous Drifting Based on Maximal Safety Probability Learning
Hikaru Hoshino, Jiaxing Li, Arnav Menon, John M. Dolan, Yorie Nakahira
This paper proposes a novel learning-based framework for autonomous driving based on the concept of maximal safety probability. Efficient learning requires rewards that are informative of desirable/undesirable states, but such rewards are challenging to design manually due to the difficulty of differentiating better states among many safe states. On the other hand, learning policies that maximize safety probability does not require laborious reward shaping but is numerically challenging because the algorithms must optimize policies based on binary rewards sparse in time. Here, we show that physics-informed reinforcement learning can efficiently learn this form of maximally safe policy. Unlike existing drift control methods, our approach does not require a specific reference trajectory or complex reward shaping, and can learn safe behaviors only from sparse binary rewards. This is enabled by the use of the physics loss that plays an analogous role to reward shaping. The effectiveness of the proposed approach is demonstrated through lane keeping in a normal cornering scenario and safe drifting in a high-speed racing scenario.
Read more9/6/2024