LiCS: Navigation using Learned-imitation on Cluttered Space
2406.14947
0
0

Abstract
In this letter, we propose a robust and fast navigation system in a narrow indoor environment for UGV (Unmanned Ground Vehicle) using 2D LiDAR and odometry. We used behavior cloning with Transformer neural network to learn the optimization-based baseline algorithm. We inject Gaussian noise during expert demonstration to increase the robustness of learned policy. We evaluate the performance of LiCS using both simulation and hardware experiments. It outperforms all other baselines in terms of navigation performance and can maintain its robust performance even on highly cluttered environments. During the hardware experiments, LiCS can maintain safe navigation at maximum speed of $1.5 m/s$.
Create account to get full access
Overview
- This paper presents LiCS, a navigation system that uses learned imitation to navigate cluttered indoor environments with a wheeled unmanned ground vehicle (UGV).
- The system leverages LiDAR data and an imitation learning approach to allow the UGV to navigate through challenging, cluttered spaces while avoiding obstacles.
- The researchers evaluate LiCS in simulation and real-world experiments, demonstrating its ability to navigate effectively in complex indoor environments.
Plain English Explanation
The paper describes a navigation system called LiCS that helps a wheeled robot navigate through cluttered, indoor spaces. The key idea is to use "imitation learning" - this means the robot learns how to navigate by observing examples of good navigation behavior, rather than being explicitly programmed with navigation rules.
The robot uses LiDAR sensors to detect its surroundings, including obstacles like furniture or walls. It then uses a neural network model that has been trained on examples of skilled human navigation to decide how to steer and move around the obstacles.
By learning from human experts rather than relying on pre-programmed rules, the robot can adapt to a wide variety of cluttered indoor environments and navigate through them more effectively. The researchers test this system in simulation and in real-world experiments, showing that it allows the robot to get around cluttered spaces safely and efficiently.
Technical Explanation
The paper presents a navigation system called LiCS ([link to "Learning-based Imitation for Cluttered Space" paper]) that uses an imitation learning approach to enable a wheeled unmanned ground vehicle (UGV) to navigate through cluttered indoor environments.
The core of LiCS is a neural network model that is trained to mimic the navigation behavior of human experts. The model takes as input point cloud data from the UGV's LiDAR sensors, which provide a 3D map of the surrounding environment. It then outputs steering and throttle commands to control the UGV's motion.
To train the model, the researchers collect datasets of human operators navigating the UGV through cluttered indoor spaces. They then use supervised learning techniques to train the neural network to reproduce the expert human navigation behavior.
During deployment, the trained LiCS model allows the UGV to navigate through new, cluttered environments in a way that imitates the skilled human navigation behavior observed in the training data. The researchers evaluate LiCS in simulation and real-world experiments, demonstrating its ability to effectively navigate through complex indoor scenes while avoiding obstacles.
Critical Analysis
The LiCS system represents a promising approach to navigation in cluttered indoor environments, leveraging imitation learning to enable a wheeled UGV to navigate in a human-like way. The key strengths of the approach are its adaptability to new environments and its potential to scale to complex, real-world scenarios.
However, the paper does not fully address some important limitations and caveats. For example, the training data used to teach the imitation model is not described in detail, so it is unclear how comprehensive or representative it is of the full range of navigation challenges the UGV may encounter. Additionally, the experiments are limited to relatively simple indoor spaces, and the performance of LiCS in more crowded or dynamically changing environments is not evaluated.
Further research would be needed to better understand the limitations of the imitation learning approach, the robustness of the trained models, and the scalability of the LiCS system to more complex real-world navigation tasks. Incorporating additional sensing modalities beyond LiDAR, as well as techniques for online model adaptation, could also help to improve the versatility and reliability of the system.
Conclusion
Overall, the LiCS navigation system represents a promising step forward in the use of imitation learning for robotic navigation in cluttered environments. By leveraging expert human navigation behavior, the system can enable wheeled UGVs to navigate through complex indoor spaces in an adaptable and human-like manner.
While the current evaluation is limited, the core ideas behind LiCS suggest that imitation learning could be a powerful approach for developing robust and capable navigation systems for a wide range of robotic platforms and applications, from autonomous vehicles to search-and-rescue operations. Further research and refinement of the techniques presented in this paper could lead to significant advances in the field of robotic navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Under-Canopy Navigation using Aerial Lidar Maps
Lucas Carvalho de Lima, Nicholas Lawrance, Kasra Khosoussi, Paulo Borges, Michael Bruenig
0
0
Autonomous navigation in unstructured natural environments poses a significant challenge. In goal navigation tasks without prior information, the limited look-ahead of onboard sensors utilised by robots compromises path efficiency. We propose a novel approach that leverages an above-the-canopy aerial map for improved ground robot navigation. Our system utilises aerial lidar scans to create a 3D probabilistic occupancy map, uniquely incorporating the uncertainty in the aerial vehicle's trajectory for improved accuracy. Novel path planning cost functions are introduced, combining path length with obstruction risk estimated from the probabilistic map. The D-Star Lite algorithm then calculates an optimal (minimum-cost) path to the goal. This system also allows for dynamic replanning upon encountering unforeseen obstacles on the ground. Extensive experiments and ablation studies in simulated and real forests demonstrate the effectiveness of our system.
6/19/2024

Learning Robust Autonomous Navigation and Locomotion for Wheeled-Legged Robots
Joonho Lee, Marko Bjelonic, Alexander Reske, Lorenz Wellhausen, Takahiro Miki, Marco Hutter
0
0
Autonomous wheeled-legged robots have the potential to transform logistics systems, improving operational efficiency and adaptability in urban environments. Navigating urban environments, however, poses unique challenges for robots, necessitating innovative solutions for locomotion and navigation. These challenges include the need for adaptive locomotion across varied terrains and the ability to navigate efficiently around complex dynamic obstacles. This work introduces a fully integrated system comprising adaptive locomotion control, mobility-aware local navigation planning, and large-scale path planning within the city. Using model-free reinforcement learning (RL) techniques and privileged learning, we develop a versatile locomotion controller. This controller achieves efficient and robust locomotion over various rough terrains, facilitated by smooth transitions between walking and driving modes. It is tightly integrated with a learned navigation controller through a hierarchical RL framework, enabling effective navigation through challenging terrain and various obstacles at high speed. Our controllers are integrated into a large-scale urban navigation system and validated by autonomous, kilometer-scale navigation missions conducted in Zurich, Switzerland, and Seville, Spain. These missions demonstrate the system's robustness and adaptability, underscoring the importance of integrated control systems in achieving seamless navigation in complex environments. Our findings support the feasibility of wheeled-legged robots and hierarchical RL for autonomous navigation, with implications for last-mile delivery and beyond.
5/6/2024
Structured Graph Network for Constrained Robot Crowd Navigation with Low Fidelity Simulation
Shuijing Liu, Kaiwen Hong, Neeloy Chakraborty, Katherine Driggs-Campbell
0
0
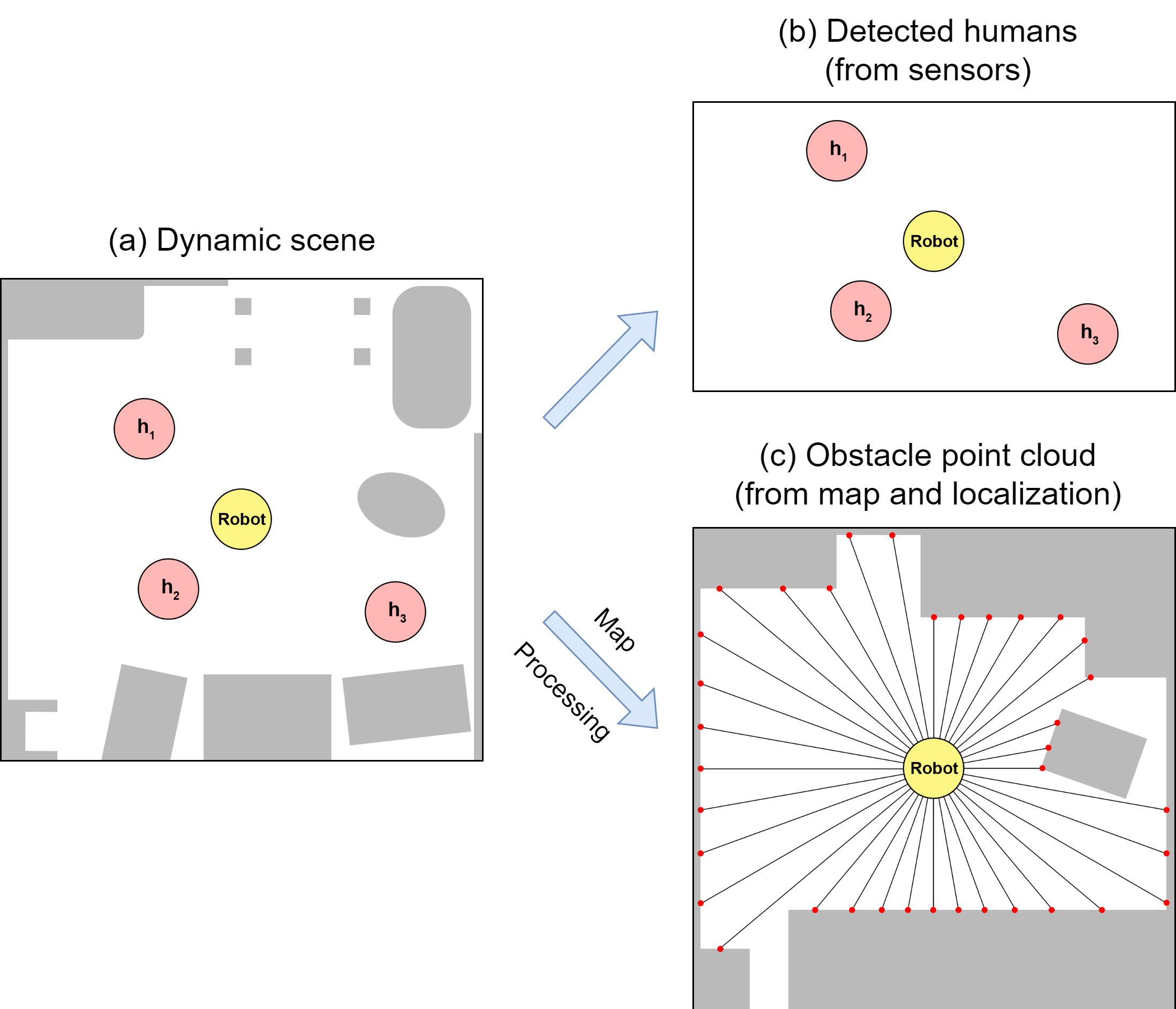
We investigate the feasibility of deploying reinforcement learning (RL) policies for constrained crowd navigation using a low-fidelity simulator. We introduce a representation of the dynamic environment, separating human and obstacle representations. Humans are represented through detected states, while obstacles are represented as computed point clouds based on maps and robot localization. This representation enables RL policies trained in a low-fidelity simulator to deploy in real world with a reduced sim2real gap. Additionally, we propose a spatio-temporal graph to model the interactions between agents and obstacles. Based on the graph, we use attention mechanisms to capture the robot-human, human-human, and human-obstacle interactions. Our method significantly improves navigation performance in both simulated and real-world environments. Video demonstrations can be found at https://sites.google.com/view/constrained-crowdnav/home.
5/29/2024

Online Robot Navigation and Manipulation with Distilled Vision-Language Models
Kangcheng Liu
0
0
Autonomous robot navigation within the dynamic unknown environment is of crucial significance for mobile robotic applications including robot navigation in last-mile delivery and robot-enabled automated supplies in industrial and hospital delivery applications. Current solutions still suffer from limitations, such as the robot cannot recognize unknown objects in real-time and cannot navigate freely in a dynamic, narrow, and complex environment. We propose a complete software framework for autonomous robot perception and navigation within very dense obstacles and dense human crowds. First, we propose a framework that accurately detects and segments open-world object categories in a zero-shot manner, which overcomes the over-segmentation limitation of the current SAM model. Second, we proposed the distillation strategy to distill the knowledge to segment the free space of the walkway for robot navigation without the label. In the meantime, we design the trimming strategy that works collaboratively with distillation to enable lightweight inference to deploy the neural network on edge devices such as NVIDIA-TX2 or Xavier NX during autonomous navigation. Integrated into the robot navigation system, extensive experiments demonstrate that our proposed framework has achieved superior performance in terms of both accuracy and efficiency in robot scene perception and autonomous robot navigation.
5/14/2024