LIMP: Large Language Model Enhanced Intent-aware Mobility Prediction

0

Sign in to get full access
Overview
- Introduces a novel approach called LIMP (Large Language Model Enhanced Intent-aware Mobility Prediction) for improving mobility prediction by leveraging large language models (LLMs).
- Highlights the potential of LLMs to capture human intent and contextual information, which can enhance traditional mobility prediction models.
- Proposes an architecture that integrates an LLM with a mobility prediction model to improve the accuracy and interpretability of mobility forecasts.
Plain English Explanation
The paper presents a method called LIMP that aims to make better predictions about how people move around, such as where they will go and how they will get there. The key idea is to use large language models (LLMs), which are AI systems trained on vast amounts of text data, to capture people's underlying intents and the context that influences their mobility decisions.
By combining an LLM with a traditional mobility prediction model, the researchers believe they can create a more accurate and interpretable system for forecasting human movement. The LLM can provide insights into why people might choose to travel to certain locations or use particular modes of transportation, rather than just predicting the next location or route. This additional understanding can lead to more reliable mobility predictions that account for the complexity of human behavior.
Technical Explanation
The LIMP approach integrates an LLM with a mobility prediction model in a two-stage process. First, the LLM is used to extract relevant intent and contextual information from user inputs, such as natural language descriptions of travel plans or preferences. This information is then fed into the mobility prediction model, which uses it to generate more accurate forecasts of future movements.
The researchers compare LIMP to other approaches that rely solely on traditional mobility data, such as location tracking or transportation records. They demonstrate that the addition of the LLM component can significantly improve the performance of the mobility prediction model, particularly in terms of capturing the underlying reasons behind people's travel decisions.
Critical Analysis
The paper acknowledges several limitations of the LIMP approach, such as the potential for bias in the LLM's understanding of human behavior and the need for large, diverse datasets to train the model effectively. Additionally, the researchers note that the interpretability benefits of the LLM may come at the cost of reduced prediction accuracy in some cases, as the model may struggle to reconcile conflicting inputs or account for all relevant factors.
Further research is needed to explore the broader applications of LLMs in mobility and transportation systems, as well as to address the ethical and privacy concerns that may arise from the use of such powerful AI systems in the context of personal movement and location data.
Conclusion
The LIMP approach represents a promising step forward in the quest to enhance mobility prediction using advanced AI techniques. By leveraging the contextual and semantic understanding of LLMs, the researchers have developed a model that can provide more nuanced and interpretable forecasts of human movement, with potential applications in urban planning, transportation management, and personalized mobility services.
As the field of mobility prediction continues to evolve, the insights and methodologies presented in this paper may serve as a valuable foundation for future research and innovation in this critical area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
LIMP: Large Language Model Enhanced Intent-aware Mobility Prediction
Songwei Li, Jie Feng, Jiawei Chi, Xinyuan Hu, Xiaomeng Zhao, Fengli Xu
Human mobility prediction is essential for applications like urban planning and transportation management, yet it remains challenging due to the complex, often implicit, intentions behind human behavior. Existing models predominantly focus on spatiotemporal patterns, paying less attention to the underlying intentions that govern movements. Recent advancements in large language models (LLMs) offer a promising alternative research angle for integrating commonsense reasoning into mobility prediction. However, it is a non-trivial problem because LLMs are not natively built for mobility intention inference, and they also face scalability issues and integration difficulties with spatiotemporal models. To address these challenges, we propose a novel LIMP (LLMs for Intent-ware Mobility Prediction) framework. Specifically, LIMP introduces an Analyze-Abstract-Infer (A2I) agentic workflow to unleash LLM's commonsense reasoning power for mobility intention inference. Besides, we design an efficient fine-tuning scheme to transfer reasoning power from commercial LLM to smaller-scale, open-source language model, ensuring LIMP's scalability to millions of mobility records. Moreover, we propose a transformer-based intention-aware mobility prediction model to effectively harness the intention inference ability of LLM. Evaluated on two real-world datasets, LIMP significantly outperforms baseline models, demonstrating improved accuracy in next-location prediction and effective intention inference. The interpretability of intention-aware mobility prediction highlights our LIMP framework's potential for real-world applications. Codes and data can be found in https://github.com/tsinghua-fib-lab/LIMP .
Read more8/26/2024

0
AgentMove: Predicting Human Mobility Anywhere Using Large Language Model based Agentic Framework
Jie Feng, Yuwei Du, Jie Zhao, Yong Li
Human mobility prediction plays a crucial role in various real-world applications. Although deep learning based models have shown promising results over the past decade, their reliance on extensive private mobility data for training and their inability to perform zero-shot predictions, have hindered further advancements. Recently, attempts have been made to apply large language models (LLMs) to mobility prediction task. However, their performance has been constrained by the absence of a systematic design of workflow. They directly generate the final output using LLMs, which limits the potential of LLMs to uncover complex mobility patterns and underestimates their extensive reserve of global geospatial knowledge. In this paper, we introduce AgentMove, a systematic agentic prediction framework to achieve generalized mobility prediction for any cities worldwide. In AgentMove, we first decompose the mobility prediction task into three sub-tasks and then design corresponding modules to complete these subtasks, including spatial-temporal memory for individual mobility pattern mining, world knowledge generator for modeling the effects of urban structure and collective knowledge extractor for capturing the shared patterns among population. Finally, we combine the results of three modules and conduct a reasoning step to generate the final predictions. Extensive experiments on mobility data from two sources in 12 cities demonstrate that AgentMove outperforms the best baseline more than 8% in various metrics and it shows robust predictions with various LLMs as base and also less geographical bias across cities. Codes and data can be found in https://github.com/tsinghua-fib-lab/AgentMove.
Read more8/27/2024
0
Large Language Models Powered Context-aware Motion Prediction
Xiaoji Zheng, Lixiu Wu, Zhijie Yan, Yuanrong Tang, Hao Zhao, Chen Zhong, Bokui Chen, Jiangtao Gong
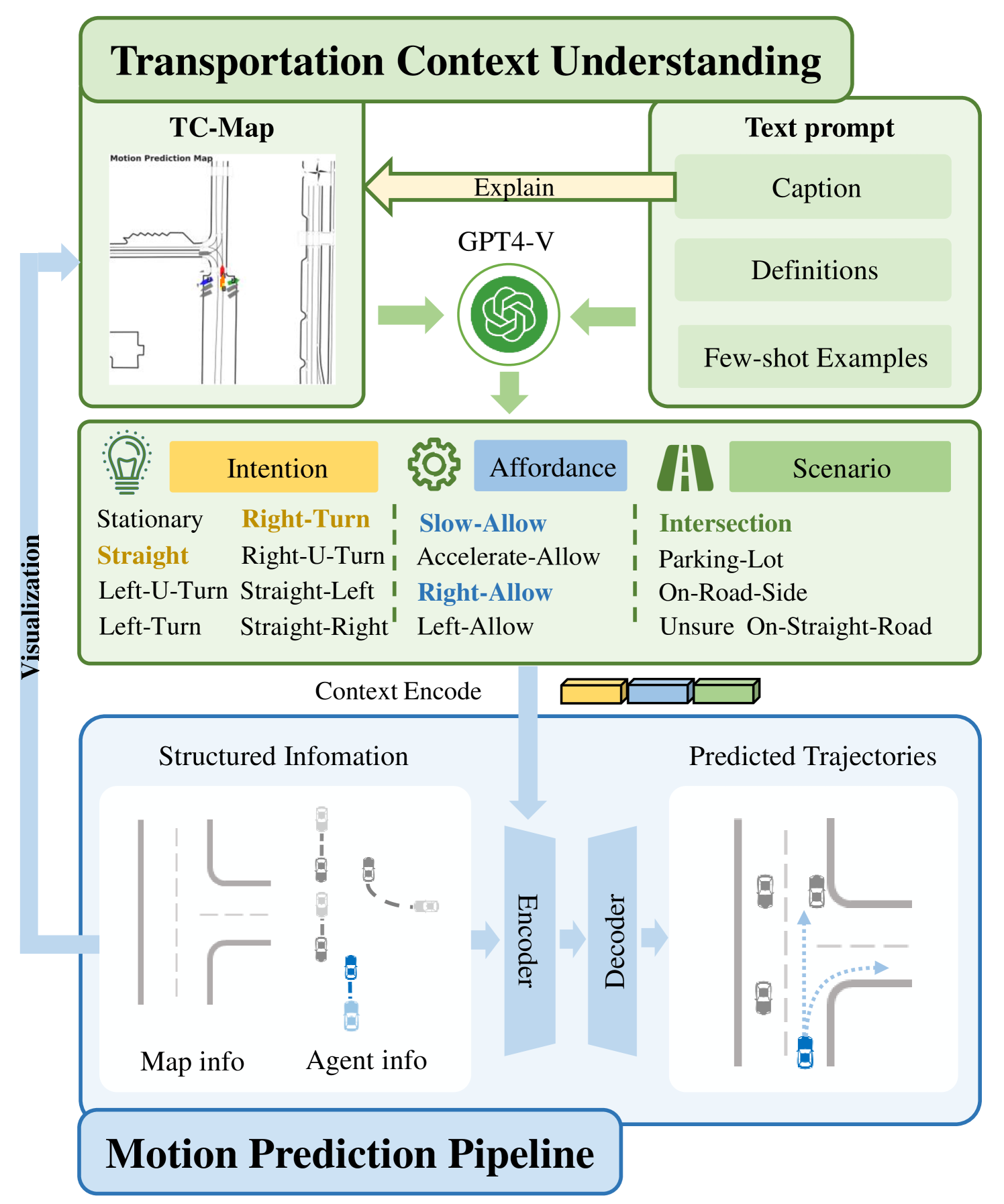
Motion prediction is among the most fundamental tasks in autonomous driving. Traditional methods of motion forecasting primarily encode vector information of maps and historical trajectory data of traffic participants, lacking a comprehensive understanding of overall traffic semantics, which in turn affects the performance of prediction tasks. In this paper, we utilized Large Language Models (LLMs) to enhance the global traffic context understanding for motion prediction tasks. We first conducted systematic prompt engineering, visualizing complex traffic environments and historical trajectory information of traffic participants into image prompts -- Transportation Context Map (TC-Map), accompanied by corresponding text prompts. Through this approach, we obtained rich traffic context information from the LLM. By integrating this information into the motion prediction model, we demonstrate that such context can enhance the accuracy of motion predictions. Furthermore, considering the cost associated with LLMs, we propose a cost-effective deployment strategy: enhancing the accuracy of motion prediction tasks at scale with 0.7% LLM-augmented datasets. Our research offers valuable insights into enhancing the understanding of traffic scenes of LLMs and the motion prediction performance of autonomous driving. The source code is available at url{https://github.com/AIR-DISCOVER/LLM-Augmented-MTR} and url{https://aistudio.baidu.com/projectdetail/7809548}.
Read more7/31/2024

0
Large Language Models as Urban Residents: An LLM Agent Framework for Personal Mobility Generation
Jiawei Wang, Renhe Jiang, Chuang Yang, Zengqing Wu, Makoto Onizuka, Ryosuke Shibasaki, Noboru Koshizuka, Chuan Xiao
This paper introduces a novel approach using Large Language Models (LLMs) integrated into an agent framework for flexible and effective personal mobility generation. LLMs overcome the limitations of previous models by effectively processing semantic data and offering versatility in modeling various tasks. Our approach addresses three research questions: aligning LLMs with real-world urban mobility data, developing reliable activity generation strategies, and exploring LLM applications in urban mobility. The key technical contribution is a novel LLM agent framework that accounts for individual activity patterns and motivations, including a self-consistency approach to align LLMs with real-world activity data and a retrieval-augmented strategy for interpretable activity generation. We evaluate our LLM agent framework and compare it with state-of-the-art personal mobility generation approaches, demonstrating the effectiveness of our approach and its potential applications in urban mobility. Overall, this study marks the pioneering work of designing an LLM agent framework for activity generation based on real-world human activity data, offering a promising tool for urban mobility analysis.
Read more5/24/2024