Large Language Models Powered Context-aware Motion Prediction

0
Sign in to get full access
Overview
- Large language models (LLMs) can be used to predict people's future movements and trajectories.
- This paper presents a method that leverages LLMs to incorporate contextual information for more accurate motion prediction.
- The approach involves using a pre-trained LLM (GPT-4-V) to extract relevant transportation context, which is then combined with other data inputs to forecast future motions.
Plain English Explanation
Large language models (LLMs) are powerful AI systems that can understand and generate human-like text. Researchers have discovered that these models can also be used to predict how people will move and where they will go in the future.
The paper described in this summary presents a new way to use LLMs for motion prediction. The key idea is to leverage the LLM's ability to understand context - things like the time of day, the weather, local events, and so on - and use that contextual information to make more accurate predictions about people's future movements and trajectories.
The researchers start by using a pre-trained LLM called GPT-4-V to extract relevant transportation-related context from text. This could include things like the mode of transportation people are likely to use, the routes they might take, and any delays or obstacles they might encounter.
This contextual information is then combined with other data inputs, like the person's current location and previous movement patterns, to forecast their future motions. By incorporating this rich contextual understanding from the LLM, the researchers were able to make more accurate predictions than approaches that only use the person's immediate surroundings and movement history.
Technical Explanation
The paper proposes a [object Object] framework that leverages the power of large language models (LLMs) to enhance trajectory forecasting.
The core of the approach is to use a pre-trained LLM, specifically GPT-4-V, to extract relevant transportation-related context. This contextual information is then combined with other inputs, such as the person's current location and past movements, to predict their future trajectory.
The key steps are:
-
Get Transportation Context from GPT-4-V: The researchers use GPT-4-V to process textual information about the person's current situation and extract relevant transportation-related context. This could include things like the mode of transportation, expected traffic conditions, and potential obstacles or delays.
-
Fuse Context with Other Inputs: The extracted transportation context is then concatenated with other data inputs, such as the person's location, speed, and movement history, to create a comprehensive representation of the current state.
-
Predict Future Trajectory: This fused input is then fed into a trajectory forecasting model to predict the person's future movements and path.
By incorporating the rich contextual understanding provided by the LLM, the researchers were able to achieve more accurate motion predictions compared to approaches that only use the person's immediate surroundings and movement history.
Critical Analysis
The paper presents a novel and promising approach to motion prediction that leverages the power of large language models. The key strength of the method is its ability to incorporate diverse contextual information, which can significantly improve the accuracy of trajectory forecasting.
However, the paper does not provide a detailed analysis of the limitations or potential drawbacks of the approach. For example, it is unclear how the method would perform in scenarios with rapidly changing or unpredictable contextual factors, such as unexpected events or emergencies. Additionally, the reliance on a pre-trained LLM (GPT-4-V) raises questions about the generalizability of the approach and its ability to adapt to different domains or use cases.
Further research would be needed to fully understand the robustness and limitations of this context-aware motion prediction framework, as well as explore potential ways to improve or extend the approach. Comparing the performance to other state-of-the-art methods in the field would also provide valuable insights.
Conclusion
This paper presents a novel approach to motion prediction that leverages the contextual understanding of large language models to enhance trajectory forecasting. By incorporating relevant transportation-related context, the researchers were able to achieve more accurate predictions compared to methods that only use the person's immediate surroundings and movement history.
The integration of LLM-based context extraction represents an exciting development in the field of motion prediction, with potential applications in areas such as transportation planning, autonomous vehicles, and urban mobility. While the paper does not fully address the limitations of the approach, it lays the foundation for future research and advancements in this promising area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Large Language Models Powered Context-aware Motion Prediction
Xiaoji Zheng, Lixiu Wu, Zhijie Yan, Yuanrong Tang, Hao Zhao, Chen Zhong, Bokui Chen, Jiangtao Gong
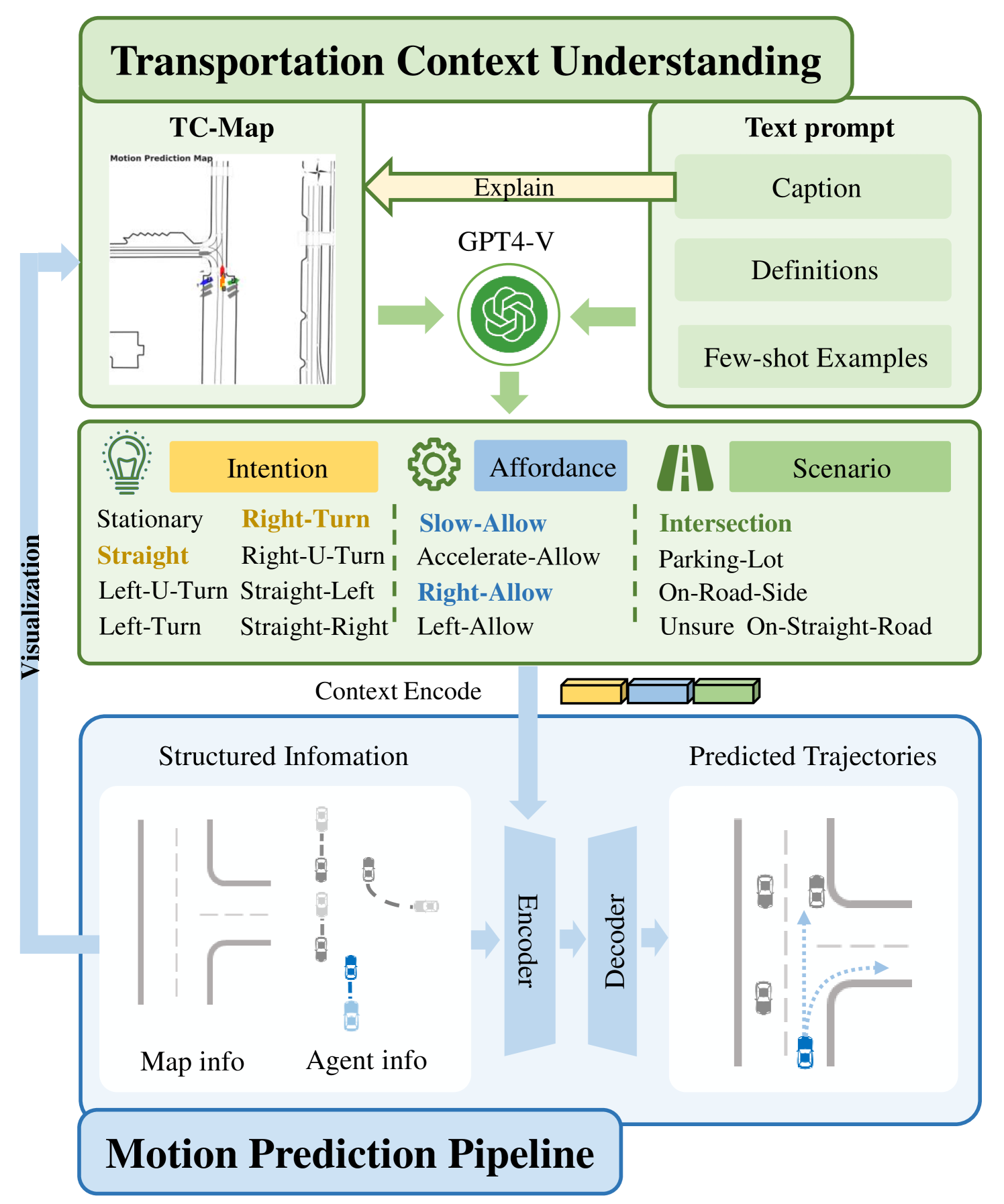
Motion prediction is among the most fundamental tasks in autonomous driving. Traditional methods of motion forecasting primarily encode vector information of maps and historical trajectory data of traffic participants, lacking a comprehensive understanding of overall traffic semantics, which in turn affects the performance of prediction tasks. In this paper, we utilized Large Language Models (LLMs) to enhance the global traffic context understanding for motion prediction tasks. We first conducted systematic prompt engineering, visualizing complex traffic environments and historical trajectory information of traffic participants into image prompts -- Transportation Context Map (TC-Map), accompanied by corresponding text prompts. Through this approach, we obtained rich traffic context information from the LLM. By integrating this information into the motion prediction model, we demonstrate that such context can enhance the accuracy of motion predictions. Furthermore, considering the cost associated with LLMs, we propose a cost-effective deployment strategy: enhancing the accuracy of motion prediction tasks at scale with 0.7% LLM-augmented datasets. Our research offers valuable insights into enhancing the understanding of traffic scenes of LLMs and the motion prediction performance of autonomous driving. The source code is available at url{https://github.com/AIR-DISCOVER/LLM-Augmented-MTR} and url{https://aistudio.baidu.com/projectdetail/7809548}.
Read more7/31/2024
🔮
0
Traj-LLM: A New Exploration for Empowering Trajectory Prediction with Pre-trained Large Language Models
Zhengxing Lan, Hongbo Li, Lingshan Liu, Bo Fan, Yisheng Lv, Yilong Ren, Zhiyong Cui
Predicting the future trajectories of dynamic traffic actors is a cornerstone task in autonomous driving. Though existing notable efforts have resulted in impressive performance improvements, a gap persists in scene cognitive and understanding of the complex traffic semantics. This paper proposes Traj-LLM, the first to investigate the potential of using Large Language Models (LLMs) without explicit prompt engineering to generate future motion from agents' past/observed trajectories and scene semantics. Traj-LLM starts with sparse context joint coding to dissect the agent and scene features into a form that LLMs understand. On this basis, we innovatively explore LLMs' powerful comprehension abilities to capture a spectrum of high-level scene knowledge and interactive information. Emulating the human-like lane focus cognitive function and enhancing Traj-LLM's scene comprehension, we introduce lane-aware probabilistic learning powered by the pioneering Mamba module. Finally, a multi-modal Laplace decoder is designed to achieve scene-compliant multi-modal predictions. Extensive experiments manifest that Traj-LLM, fortified by LLMs' strong prior knowledge and understanding prowess, together with lane-aware probability learning, outstrips state-of-the-art methods across evaluation metrics. Moreover, the few-shot analysis further substantiates Traj-LLM's performance, wherein with just 50% of the dataset, it outperforms the majority of benchmarks relying on complete data utilization. This study explores equipping the trajectory prediction task with advanced capabilities inherent in LLMs, furnishing a more universal and adaptable solution for forecasting agent motion in a new way.
Read more5/9/2024

0
iMotion-LLM: Motion Prediction Instruction Tuning
Abdulwahab Felemban, Eslam Mohamed Bakr, Xiaoqian Shen, Jian Ding, Abduallah Mohamed, Mohamed Elhoseiny
We introduce iMotion-LLM: a Multimodal Large Language Models (LLMs) with trajectory prediction, tailored to guide interactive multi-agent scenarios. Different from conventional motion prediction approaches, iMotion-LLM capitalizes on textual instructions as key inputs for generating contextually relevant trajectories. By enriching the real-world driving scenarios in the Waymo Open Dataset with textual motion instructions, we created InstructWaymo. Leveraging this dataset, iMotion-LLM integrates a pretrained LLM, fine-tuned with LoRA, to translate scene features into the LLM input space. iMotion-LLM offers significant advantages over conventional motion prediction models. First, it can generate trajectories that align with the provided instructions if it is a feasible direction. Second, when given an infeasible direction, it can reject the instruction, thereby enhancing safety. These findings act as milestones in empowering autonomous navigation systems to interpret and predict the dynamics of multi-agent environments, laying the groundwork for future advancements in this field.
Read more6/12/2024
💬
0
Large Language Models for Mobility in Transportation Systems: A Survey on Forecasting Tasks
Zijian Zhang, Yujie Sun, Zepu Wang, Yuqi Nie, Xiaobo Ma, Peng Sun, Ruolin Li
Mobility analysis is a crucial element in the research area of transportation systems. Forecasting traffic information offers a viable solution to address the conflict between increasing transportation demands and the limitations of transportation infrastructure. Predicting human travel is significant in aiding various transportation and urban management tasks, such as taxi dispatch and urban planning. Machine learning and deep learning methods are favored for their flexibility and accuracy. Nowadays, with the advent of large language models (LLMs), many researchers have combined these models with previous techniques or applied LLMs to directly predict future traffic information and human travel behaviors. However, there is a lack of comprehensive studies on how LLMs can contribute to this field. This survey explores existing approaches using LLMs for mobility forecasting problems. We provide a literature review concerning the forecasting applications within transportation systems, elucidating how researchers utilize LLMs, showcasing recent state-of-the-art advancements, and identifying the challenges that must be overcome to fully leverage LLMs in this domain.
Read more5/7/2024