A Linear MPC with Control Barrier Functions for Differential Drive Robots
2404.10018
0
0
👁️
Abstract
The need for fully autonomous mobile robots has surged over the past decade, with the imperative of ensuring safe navigation in a dynamic setting emerging as a primary challenge impeding advancements in this domain. In this paper, a Safety Critical Model Predictive Control based on Dynamic Feedback Linearization tailored to the application of differential drive robots with two wheels is proposed to generate control signals that result in obstacle-free paths. A barrier function introduces a safety constraint to the optimization problem of the Model Predictive Control (MPC) to prevent collisions. Due to the intrinsic nonlinearities of the differential drive robots, computational complexity while implementing a Nonlinear Model Predictive Control (NMPC) arises. To facilitate the real-time implementation of the optimization problem and to accommodate the underactuated nature of the robot, a combination of Linear Model Predictive Control (LMPC) and Dynamic Feedback Linearization (DFL) is proposed. The MPC problem is formulated on a linear equivalent model of the differential drive robot rendered by the DFL controller. The analysis of the closed-loop stability and recursive feasibility of the proposed control design is discussed. Numerical experiments illustrate the robustness and effectiveness of the proposed control synthesis in avoiding obstacles with respect to the benchmark of using Euclidean distance constraints. Keywords: Model Predictive Control, MPC, Autonomous Ground Vehicles, Nonlinearity, Dynamic Feedback Linearization, Optimal Control, Differential Robots.
Create account to get full access
Overview
- Autonomous mobile robots have become increasingly important, but safely navigating dynamic environments remains a key challenge.
- This paper proposes a Safety Critical Model Predictive Control approach using Dynamic Feedback Linearization to generate collision-free paths for differential drive robots.
- The approach combines Linear Model Predictive Control and Dynamic Feedback Linearization to address the computational complexity of a Nonlinear Model Predictive Control approach.
- Numerical experiments demonstrate the robustness and effectiveness of the proposed control synthesis in avoiding obstacles.
Plain English Explanation
Autonomous mobile robots, like self-driving cars or warehouse robots, need to be able to navigate safely in dynamic environments with obstacles. This is a major challenge that has become increasingly important as the use of these robots has grown.
The paper proposes a new control system to help these robots plan collision-free paths. It uses a technique called Model Predictive Control (MPC), which allows the robot to predict the future and plan its movements accordingly. To make this work for the complex, nonlinear dynamics of a differential drive robot (a robot with two wheels), the researchers combine MPC with another technique called Dynamic Feedback Linearization (DFL).
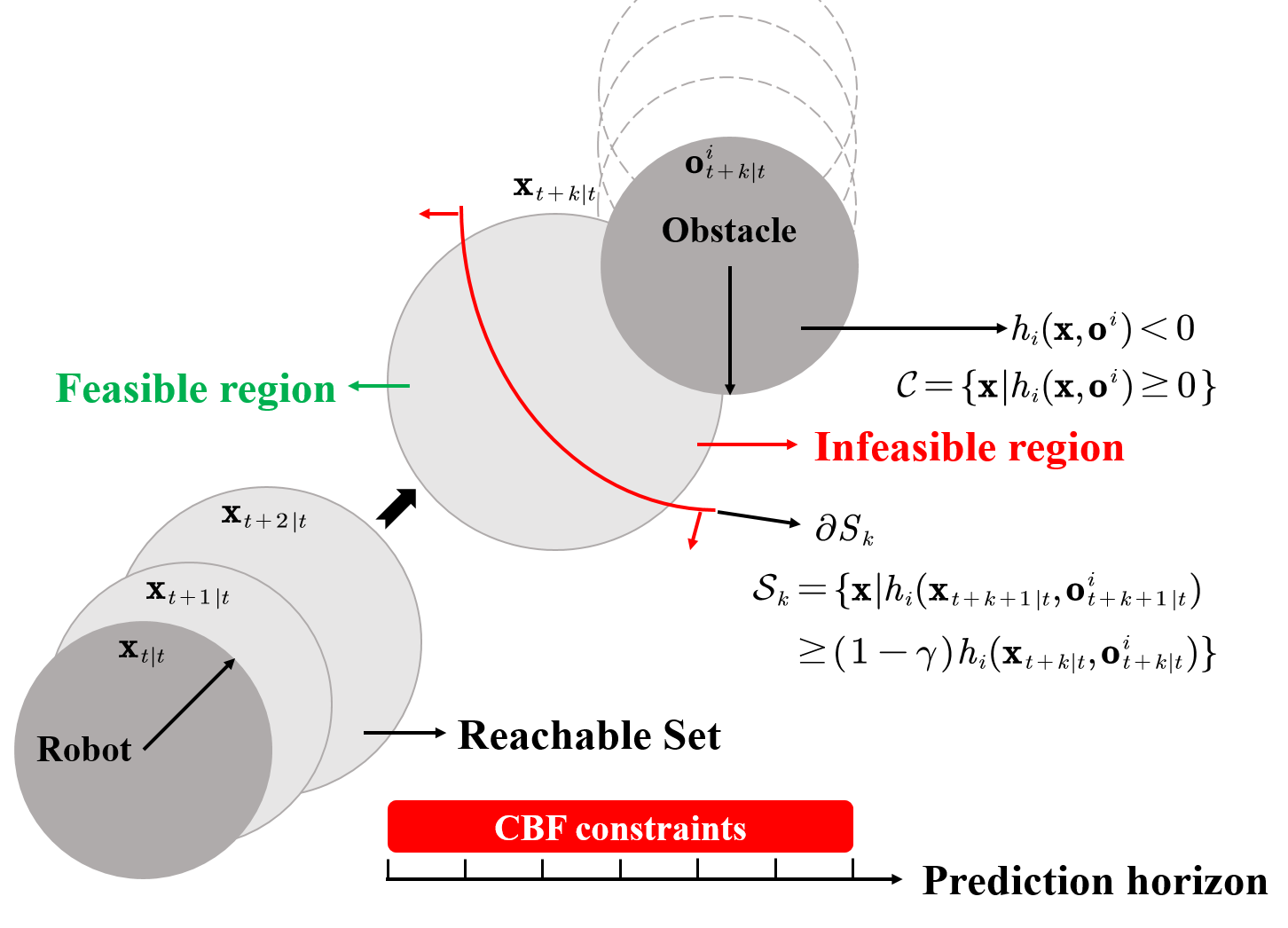
DFL helps simplify the robot's dynamics, making it easier for the MPC algorithm to work in real-time. The researchers also add a "barrier function" to the MPC optimization problem, which acts as a safety constraint to prevent the robot from colliding with obstacles.
Through numerical simulations, the researchers show that this combined approach is effective at helping the robot navigate through dynamic environments while avoiding obstacles. This is an important step forward in enabling fully autonomous mobile robots to operate safely in the real world.
Technical Explanation
The paper proposes a Safety Critical Model Predictive Control (SC-MPC) approach based on Dynamic Feedback Linearization (DFL) for differential drive robots. MPC is used to generate obstacle-free paths by formulating an optimization problem that includes a barrier function to enforce safety constraints and prevent collisions.
Due to the inherent nonlinearities of differential drive robots, directly implementing a Nonlinear Model Predictive Control (NMPC) approach would be computationally complex. To facilitate real-time implementation, the researchers propose a combination of Linear Model Predictive Control (LMPC) and DFL.
The MPC problem is formulated on a linear equivalent model of the differential drive robot obtained through the DFL controller. This allows the optimization problem to be solved efficiently while still capturing the robot's nonlinear dynamics.
The stability and recursive feasibility of the proposed control design are analyzed theoretically. Numerical experiments are conducted to illustrate the robustness and effectiveness of the control synthesis in avoiding obstacles, benchmarked against using Euclidean distance constraints.
Critical Analysis
The paper provides a detailed technical solution to the challenge of safe navigation for autonomous mobile robots in dynamic environments. The combination of MPC and DFL is a novel approach that addresses the computational complexity of a pure NMPC implementation.
However, the paper does not discuss the potential limitations of this approach. For example, it is unclear how well the method would scale to more complex robot configurations or larger environments with many obstacles. Additionally, the numerical experiments are limited in scope and do not consider real-world uncertainties or sensor noise, which could affect the performance of the control system.
Further research is needed to fully validate the proposed approach and explore its limitations. Comparisons to other state-of-the-art methods for robot navigation, such as actor-critic MPC, would also be valuable to assess the relative strengths and weaknesses of this technique.
Conclusion
This paper presents a promising approach to the challenge of safe navigation for autonomous mobile robots in dynamic environments. By combining Model Predictive Control and Dynamic Feedback Linearization, the researchers have developed a control system that can efficiently generate collision-free paths for differential drive robots.
The theoretical analysis and numerical experiments demonstrate the robustness and effectiveness of the proposed control synthesis. This work represents an important step forward in enabling fully autonomous mobile robots to operate safely in the real world, with potential applications in areas like self-driving cars, warehouse automation, and search and rescue operations.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Robot Safe Planning In Dynamic Environments Based On Model Predictive Control Using Control Barrier Function
Zetao Lu, Kaijun Feng, Jun Xu, Haoyao Chen, Yunjiang Lou
0
0
Implementing obstacle avoidance in dynamic environments is a challenging problem for robots. Model predictive control (MPC) is a popular strategy for dealing with this type of problem, and recent work mainly uses control barrier function (CBF) as hard constraints to ensure that the system state remains in the safe set. However, in crowded scenarios, effective solutions may not be obtained due to infeasibility problems, resulting in degraded controller performance. We propose a new MPC framework that integrates CBF to tackle the issue of obstacle avoidance in dynamic environments, in which the infeasibility problem induced by hard constraints operating over the whole prediction horizon is solved by softening the constraints and introducing exact penalty, prompting the robot to actively seek out new paths. At the same time, generalized CBF is extended as a single-step safety constraint of the controller to enhance the safety of the robot during navigation. The efficacy of the proposed method is first shown through simulation experiments, in which a double-integrator system and a unicycle system are employed, and the proposed method outperforms other controllers in terms of safety, feasibility, and navigation efficiency. Furthermore, real-world experiment on an MR1000 robot is implemented to demonstrate the effectiveness of the proposed method.
4/10/2024
👀
Vector Field-Guided Learning Predictive Control for Motion Planning of Mobile Robots with Unknown Dynamics
Yang Lu, Weijia Yao, Yongqian Xiao, Xin Xu
0
0
Safe maneuvering capability is critical for mobile robots in complex environments. However, robotic system dynamics are often time-varying, uncertain, or even unknown during the motion planning and control process. Therefore, many existing model-based reinforcement learning (RL) methods could not achieve satisfactory reliability in guaranteeing safety. To address this challenge, we propose a two-level Vector Field-guided Learning Predictive Control (VF-LPC) approach that guarantees safe maneuverability. The first level, the guiding level, generates safe desired trajectories using the designed kinodynamic guiding vector field, enabling safe motion in obstacle-dense environments. The second level, the Integrated Motion Planning and Control (IMPC) level, first uses the deep Koopman operator to learn a nominal dynamics model offline and then updates the model uncertainties online using sparse Gaussian processes (GPs). The learned dynamics and game-based safe barrier function are then incorporated into the learning predictive control framework to generate near-optimal control sequences. We conducted tests to compare the performance of VF-LPC with existing advanced planning methods in an obstacle-dense environment. The simulation results show that it can generate feasible trajectories quickly. Then, VF-LPC is evaluated against motion planning methods that employ model predictive control (MPC) and RL in high-fidelity CarSim software. The results show that VF-LPC outperforms them under metrics of completion time, route length, and average solution time. We also carried out path-tracking control tests on a racing road to validate the model uncertainties learning capability. Finally, we conducted real-world experiments on a Hongqi E-HS3 vehicle, further validating the VF-LPC approach's effectiveness.
5/15/2024

Robust Dynamic Control Barrier Function Based Trajectory Planning for Mobile Manipulator
Lihao Xu, Xiaogang Xiong, Bai Yang, Yunjiang Lou
0
0
High-dimensional robot dynamic trajectory planning poses many challenges for traditional planning algorithms. Existing planning methods suffer from issues such as long computation times, limited capacity to address intricate obstacle models, and lack of consideration for external disturbances and measurement inaccuracies in these high-dimensional systems. To tackle these challenges, this paper proposes a novel trajectory planning approach that combines Dynamic Control Barrier Function (DCBF) with a disturbance observer to create a Robust Dynamic Control Barrier Function (RDCBF) planner. This approach successfully plans trajectories in environments with complex dynamic obstacles while accounting for external disturbances and measurement uncertainties, ensuring system safety and enabling precise obstacle avoidance. Experimental results on a mobile manipulator demonstrate outstanding performance of the proposed approach.
6/26/2024

Embedded Hierarchical MPC for Autonomous Navigation
Dennis Benders, Johannes Kohler, Thijs Niesten, Robert Babuv{s}ka, Javier Alonso-Mora, Laura Ferranti
0
0
To efficiently deploy robotic systems in society, mobile robots need to autonomously and safely move through complex environments. Nonlinear model predictive control (MPC) methods provide a natural way to find a dynamically feasible trajectory through the environment without colliding with nearby obstacles. However, the limited computation power available on typical embedded robotic systems, such as quadrotors, poses a challenge to running MPC in real-time, including its most expensive tasks: constraints generation and optimization. To address this problem, we propose a novel hierarchical MPC scheme that interconnects a planning and a tracking layer. The planner constructs a trajectory with a long prediction horizon at a slow rate, while the tracker ensures trajectory tracking at a relatively fast rate. We prove that the proposed framework avoids collisions and is recursively feasible. Furthermore, we demonstrate its effectiveness in simulations and lab experiments with a quadrotor that needs to reach a goal position in a complex static environment. The code is efficiently implemented on the quadrotor's embedded computer to ensure real-time feasibility. Compared to a state-of-the-art single-layer MPC formulation, this allows us to increase the planning horizon by a factor of 5, which results in significantly better performance.
6/18/2024