LLaNA: Large Language and NeRF Assistant

0

Sign in to get full access
Overview
- This paper introduces LLaNA, a large language model that can assist with tasks involving neural radiance fields (NeRFs).
- LLaNA combines the capabilities of large language models with the ability to generate and manipulate NeRFs, which are 3D scene representations used in computer vision and graphics.
- The paper explores how this combined model can be used for a variety of applications, such as multimodal content generation, retrieval, and editing.
Plain English Explanation
This research paper describes a new AI system called LLaNA, which stands for "Large Language and NeRF Assistant." NeRFs are a way of representing 3D scenes using machine learning models. LLaNA brings together the power of large language models, which can understand and generate human language, with the ability to work with NeRFs.
The key idea is that by combining these two capabilities, LLaNA can help with all sorts of tasks that involve language, images, and 3D content. For example, LLaNA could be used to describe the contents of a 3D scene in natural language, or to generate new 3D scenes based on text prompts. It could also be used to edit or manipulate existing NeRF models in response to language instructions.
The researchers envision LLaNA being a powerful tool for creative applications, data visualization, robotics, and more. By combining language understanding and 3D modeling, it could enable new ways of interacting with and understanding the world around us.
Technical Explanation
The key technical components of LLaNA are:
-
A large language model, pre-trained on a vast amount of text data, that can understand and generate human language. This provides the "language" capabilities of LLaNA.
-
A NeRF model, trained on 3D scene data, that can represent and manipulate the geometric and appearance properties of those scenes. This provides the "NeRF" capabilities of LLaNA.
-
A way of integrating the language model and NeRF model, so that the system can take in language inputs, reason about them, and then generate or manipulate NeRF content accordingly. This could involve techniques like prompting the language model to generate NeRF parameters or using the language model to control a NeRF rendering pipeline.
The researchers explore several different applications of LLaNA, including multimodal content generation, retrieval of 3D content based on text queries, and interactive editing of NeRF models based on language instructions.
Critical Analysis
The researchers acknowledge several limitations and areas for future work with LLaNA. For example, the current system is limited to relatively simple NeRF models and language tasks, and it's not clear how well it would scale to more complex 3D scenes or language understanding.
There are also open questions about the robustness and generalization of the integrated language-NeRF model, and how well it would perform on real-world tasks compared to specialized systems.
Additionally, the ethical implications of a system like LLaNA, which can generate photorealistic 3D content from language, are not fully explored. There are potential concerns around the misuse of such technology for deepfakes or other deceptive purposes.
Overall, while LLaNA represents an interesting and promising step forward, there is still significant work to be done to realize the full potential of integrating large language models and 3D scene representations.
Conclusion
This paper introduces LLaNA, a novel AI system that combines the capabilities of large language models with the ability to generate and manipulate neural radiance fields (NeRFs). By bringing together these two powerful technologies, the researchers have created a tool that can be applied to a wide range of applications, from multimodal content generation to interactive 3D scene editing.
While LLaNA still has limitations and areas for future development, the core idea of integrating language understanding and 3D modeling is an exciting and potentially transformative step forward. As large language models and NeRF techniques continue to advance, systems like LLaNA could enable new ways of interacting with and understanding the digital and physical world around us.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
LLaNA: Large Language and NeRF Assistant
Andrea Amaduzzi, Pierluigi Zama Ramirez, Giuseppe Lisanti, Samuele Salti, Luigi Di Stefano
Multimodal Large Language Models (MLLMs) have demonstrated an excellent understanding of images and 3D data. However, both modalities have shortcomings in holistically capturing the appearance and geometry of objects. Meanwhile, Neural Radiance Fields (NeRFs), which encode information within the weights of a simple Multi-Layer Perceptron (MLP), have emerged as an increasingly widespread modality that simultaneously encodes the geometry and photorealistic appearance of objects. This paper investigates the feasibility and effectiveness of ingesting NeRF into MLLM. We create LLaNA, the first general-purpose NeRF-language assistant capable of performing new tasks such as NeRF captioning and Q&A. Notably, our method directly processes the weights of the NeRF's MLP to extract information about the represented objects without the need to render images or materialize 3D data structures. Moreover, we build a dataset of NeRFs with text annotations for various NeRF-language tasks with no human intervention. Based on this dataset, we develop a benchmark to evaluate the NeRF understanding capability of our method. Results show that processing NeRF weights performs favourably against extracting 2D or 3D representations from NeRFs.
Read more6/18/2024
0
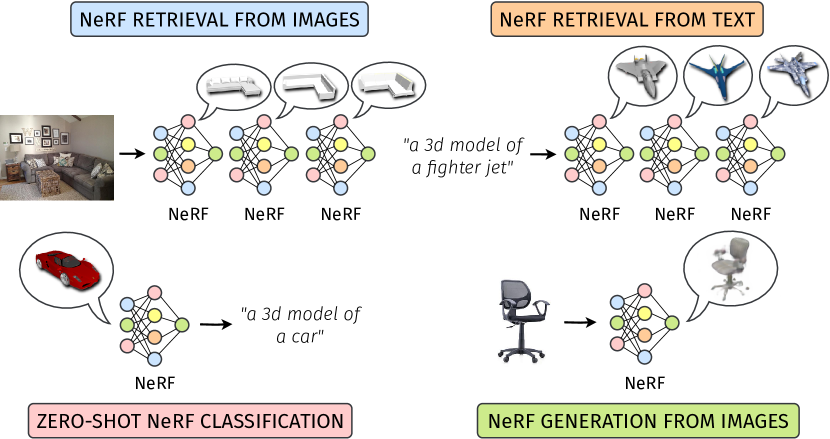
Connecting NeRFs, Images, and Text
Francesco Ballerini, Pierluigi Zama Ramirez, Roberto Mirabella, Samuele Salti, Luigi Di Stefano
Neural Radiance Fields (NeRFs) have emerged as a standard framework for representing 3D scenes and objects, introducing a novel data type for information exchange and storage. Concurrently, significant progress has been made in multimodal representation learning for text and image data. This paper explores a novel research direction that aims to connect the NeRF modality with other modalities, similar to established methodologies for images and text. To this end, we propose a simple framework that exploits pre-trained models for NeRF representations alongside multimodal models for text and image processing. Our framework learns a bidirectional mapping between NeRF embeddings and those obtained from corresponding images and text. This mapping unlocks several novel and useful applications, including NeRF zero-shot classification and NeRF retrieval from images or text.
Read more4/12/2024
🧠
0
Benchmarking Neural Radiance Fields for Autonomous Robots: An Overview
Yuhang Ming, Xingrui Yang, Weihan Wang, Zheng Chen, Jinglun Feng, Yifan Xing, Guofeng Zhang
Neural Radiance Fields (NeRF) have emerged as a powerful paradigm for 3D scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. In this paper, we present a comprehensive survey and analysis of the state-of-the-art techniques for utilizing NeRF to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3D reconstruction, segmentation, pose estimation, simultaneous localization and mapping (SLAM), navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, providing insights into their strengths and limitations. Moreover, we explore promising avenues for future research and development in this domain. Notably, we discuss the integration of advanced techniques such as 3D Gaussian splatting (3DGS), large language models (LLM), and generative AIs, envisioning enhanced reconstruction efficiency, scene understanding, decision-making capabilities. This survey serves as a roadmap for researchers seeking to leverage NeRFs to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
Read more7/29/2024
🧠
0
Multi-tiling Neural Radiance Field (NeRF) -- Geometric Assessment on Large-scale Aerial Datasets
Ningli Xu, Rongjun Qin, Debao Huang, Fabio Remondino
Neural Radiance Fields (NeRF) offer the potential to benefit 3D reconstruction tasks, including aerial photogrammetry. However, the scalability and accuracy of the inferred geometry are not well-documented for large-scale aerial assets,since such datasets usually result in very high memory consumption and slow convergence.. In this paper, we aim to scale the NeRF on large-scael aerial datasets and provide a thorough geometry assessment of NeRF. Specifically, we introduce a location-specific sampling technique as well as a multi-camera tiling (MCT) strategy to reduce memory consumption during image loading for RAM, representation training for GPU memory, and increase the convergence rate within tiles. MCT decomposes a large-frame image into multiple tiled images with different camera models, allowing these small-frame images to be fed into the training process as needed for specific locations without a loss of accuracy. We implement our method on a representative approach, Mip-NeRF, and compare its geometry performance with threephotgrammetric MVS pipelines on two typical aerial datasets against LiDAR reference data. Both qualitative and quantitative results suggest that the proposed NeRF approach produces better completeness and object details than traditional approaches, although as of now, it still falls short in terms of accuracy.
Read more6/7/2024