Long-Range Vision-Based UAV-assisted Localization for Unmanned Surface Vehicles

0

Sign in to get full access
Overview
- The paper explores a vision-based localization system for unmanned surface vehicles (USVs) using a unmanned aerial vehicle (UAV) as a long-range sensor.
- The proposed system enables accurate positioning of USVs in GNSS-denied environments by leveraging the UAV's bird's-eye view and extended range.
- An extended Kalman filter is used to fuse data from the UAV's camera, USV's onboard sensors, and other environmental factors to estimate the USV's position.
- The system is evaluated through simulations and field experiments, demonstrating its effectiveness in improving USV localization accuracy.
Plain English Explanation
The paper presents a way to help unmanned boats (called unmanned surface vehicles or USVs) figure out where they are, even when the GPS signal is blocked or unreliable. To do this, it uses a unmanned aerial vehicle (UAV) flying overhead as a long-range camera to spot the USV and track its movements.
The key idea is that the UAV can see the USV from a bird's-eye view, which gives it a better perspective than the USV's own sensors. By combining the information from the UAV's camera, the USV's onboard sensors, and other environmental data, the researchers developed a filtering algorithm that can accurately estimate the USV's position, even in areas where GPS doesn't work well.
The researchers tested this system through computer simulations and real-world experiments, and found that it significantly improves the USV's ability to know where it is located. This could be very useful for USVs operating in GPS-denied environments, such as near cliffs, buildings, or underwater, where traditional navigation methods struggle.
Technical Explanation
The paper proposes a vision-based localization system for unmanned surface vehicles (USVs) that utilizes a unmanned aerial vehicle (UAV) as a long-range sensor. This approach addresses the challenge of GNSS denial for USV position estimation.
The system uses an extended Kalman filter to fuse data from the UAV's camera, the USV's onboard sensors (e.g., IMU, compass, odometry), and other environmental factors (e.g., wind, currents) to estimate the USV's position. The UAV's bird's-eye view and extended range provide valuable information to improve the localization accuracy, especially in areas where GPS signals are degraded or unavailable.
The researchers evaluate the proposed system through both simulations and field experiments, demonstrating its effectiveness in enhancing USV localization compared to relying solely on the USV's onboard sensors. The results show that the vision-based UAV-assisted approach can significantly improve the USV's ability to determine its position in GNSS-denied environments.
Critical Analysis
The paper presents a promising approach to address the challenge of USV localization in GNSS-denied environments. The use of a UAV as a long-range sensor is a novel and compelling solution, leveraging the bird's-eye view and extended range to enhance the USV's position estimation.
However, the paper does not extensively discuss the limitations and potential challenges of the proposed system. For example, the performance of the system in real-world scenarios with dynamic environments, varying weather conditions, or potential interference between the UAV and USV operations is not thoroughly explored. Additionally, the scalability of the approach to larger-scale deployments or scenarios with multiple USVs and UAVs could be an area for further investigation.
Furthermore, the paper does not provide a comprehensive analysis of the computational and power requirements of the system, which could be crucial factors for real-world deployment, especially in resource-constrained maritime environments.
Conclusion
The paper presents a vision-based localization system that leverages a UAV as a long-range sensor to improve the positioning accuracy of unmanned surface vehicles in GNSS-denied environments. The proposed approach, which utilizes an extended Kalman filter to fuse data from various sources, demonstrates promising results in both simulations and field experiments.
The ability to accurately locate USVs in areas where traditional GPS-based methods fail could have significant implications for a wide range of maritime applications, such as environmental monitoring, search and rescue operations, and autonomous cargo transportation. Further research and development in this area could lead to more robust and reliable navigation solutions for USVs, enhancing their capabilities and expanding their operational domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Long-Range Vision-Based UAV-assisted Localization for Unmanned Surface Vehicles
Waseem Akram, Siyuan Yang, Hailiang Kuang, Xiaoyu He, Muhayy Ud Din, Yihao Dong, Defu Lin, Lakmal Seneviratne, Shaoming He, Irfan Hussain
The global positioning system (GPS) has become an indispensable navigation method for field operations with unmanned surface vehicles (USVs) in marine environments. However, GPS may not always be available outdoors because it is vulnerable to natural interference and malicious jamming attacks. Thus, an alternative navigation system is required when the use of GPS is restricted or prohibited. To this end, we present a novel method that utilizes an Unmanned Aerial Vehicle (UAV) to assist in localizing USVs in GNSS-restricted marine environments. In our approach, the UAV flies along the shoreline at a consistent altitude, continuously tracking and detecting the USV using a deep learning-based approach on camera images. Subsequently, triangulation techniques are applied to estimate the USV's position relative to the UAV, utilizing geometric information and datalink range from the UAV. We propose adjusting the UAV's camera angle based on the pixel error between the USV and the image center throughout the localization process to enhance accuracy. Additionally, visual measurements are integrated into an Extended Kalman Filter (EKF) for robust state estimation. To validate our proposed method, we utilize a USV equipped with onboard sensors and a UAV equipped with a camera. A heterogeneous robotic interface is established to facilitate communication between the USV and UAV. We demonstrate the efficacy of our approach through a series of experiments conducted during the ``Muhammad Bin Zayed International Robotic Challenge (MBZIRC-2024)'' in real marine environments, incorporating noisy measurements and ocean disturbances. The successful outcomes indicate the potential of our method to complement GPS for USV navigation.
Read more8/22/2024
🤿
0
A Sonar-based AUV Positioning System for Underwater Environments with Low Infrastructure Density
Emilio Olivastri, Daniel Fusaro, Wanmeng Li, Simone Mosco, Alberto Pretto
The increasing demand for underwater vehicles highlights the necessity for robust localization solutions in inspection missions. In this work, we present a novel real-time sonar-based underwater global positioning algorithm for AUVs (Autonomous Underwater Vehicles) designed for environments with a sparse distribution of human-made assets. Our approach exploits two synergistic data interpretation frontends applied to the same stream of sonar data acquired by a multibeam Forward-Looking Sonar (FSD). These observations are fused within a Particle Filter (PF) either to weigh more particles that belong to high-likelihood regions or to solve symmetric ambiguities. Preliminary experiments carried out on a simulated environment resembling a real underwater plant provided promising results. This work represents a starting point towards future developments of the method and consequent exhaustive evaluations also in real-world scenarios.
Read more5/6/2024

0
Towards UAV-USV Collaboration in Harsh Maritime Conditions Including Large Waves
Filip Nov'ak, Tom'av{s} B'av{c}a, Ondv{r}ej Proch'azka, Martin Saska
This paper introduces a system designed for tight collaboration between Unmanned Aerial Vehicles (UAVs) and Unmanned Surface Vehicles (USVs) in harsh maritime conditions characterized by large waves. This onboard UAV system aims to enhance collaboration with USVs for following and landing tasks under such challenging conditions. The main contribution of our system is the novel mathematical USV model, describing the movement of the USV in 6 degrees of freedom on a wavy water surface, which is used to estimate and predict USV states. The estimator fuses data from multiple global and onboard sensors, ensuring accurate USV state estimation. The predictor computes future USV states using the novel mathematical USV model and the last estimated states. The estimated and predicted USV states are forwarded into a trajectory planner that generates a UAV trajectory for following the USV or landing on its deck, even in harsh environmental conditions. The proposed approach was verified in numerous simulations and deployed to the real world, where the UAV was able to follow the USV and land on its deck repeatedly.
Read more8/20/2024
0
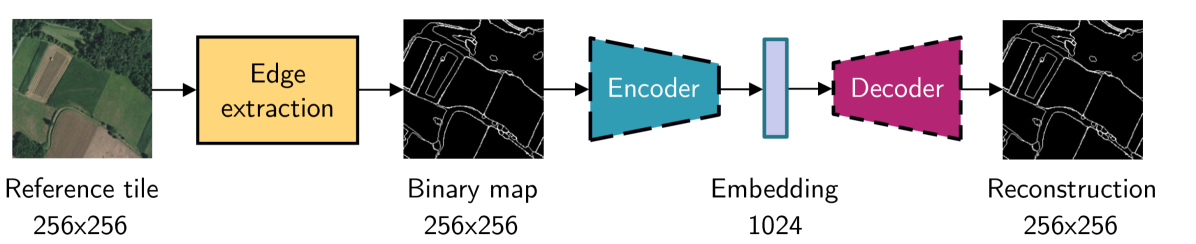
Leveraging edge detection and neural networks for better UAV localization
Theo Di Piazza, Enric Meinhardt-Llopis, Gabriele Facciolo, Benedicte Bascle, Corentin Abgrall, Jean-Clement Devaux
We propose a novel method for geolocalizing Unmanned Aerial Vehicles (UAVs) in environments lacking Global Navigation Satellite Systems (GNSS). Current state-of-the-art techniques employ an offline-trained encoder to generate a vector representation (embedding) of the UAV's current view, which is then compared with pre-computed embeddings of geo-referenced images to determine the UAV's position. Here, we demonstrate that the performance of these methods can be significantly enhanced by preprocessing the images to extract their edges, which exhibit robustness to seasonal and illumination variations. Furthermore, we establish that utilizing edges enhances resilience to orientation and altitude inaccuracies. Additionally, we introduce a confidence criterion for localization. Our findings are substantiated through synthetic experiments.
Read more6/4/2024