Accurate Prior-centric Monocular Positioning with Offline LiDAR Fusion

0

Sign in to get full access
Overview
- This paper presents a method for accurate monocular positioning with offline LiDAR fusion for autonomous vehicles.
- The approach leverages prior information from a semantic map to improve the accuracy of monocular localization.
- The authors demonstrate the effectiveness of their method through experiments and comparisons to other techniques.
Plain English Explanation
The paper describes a new way for self-driving cars to figure out their exact location using a single camera, with the help of 3D map data collected by laser scanners (LiDAR). Typically, localization for autonomous vehicles relies on expensive sensor setups with multiple cameras and LiDAR units. This can be impractical or costly to deploy at scale.
The key insight of this research is to instead use the car's onboard camera along with a pre-built 3D map of the environment. The camera images are matched against the semantic information (things like road, buildings, etc.) in the map to precisely determine the vehicle's position. This "monocular localization with semantic map" approach is more cost-effective than requiring dedicated LiDAR sensors on every car.
The authors show that their method can achieve accurate positioning results, on par with or better than systems that use LiDAR directly. This is an important step towards making self-driving cars more practical and accessible. By relying on cameras instead of specialized hardware, the technology becomes more affordable and easier to deploy widely.
Technical Explanation
The proposed system uses a monocular camera as the primary sensor for localization, combined with an offline-generated 3D semantic map of the environment. This "monocular 3D object detection" approach avoids the need for expensive LiDAR sensors on every vehicle.
The key technical components are:
-
Semantic Map Generation: The authors construct a detailed 3D map of the environment, annotated with semantic labels for different objects and structures (e.g. roads, buildings, etc.). This map is generated offline using data from roadside LiDAR sensors, as described in "roadside LiDAR-assisted cooperative localization".
-
Monocular Pose Estimation: Given a camera image from the vehicle, the system performs "fast Monte Carlo passive global localization" to estimate the 6-DoF pose (position and orientation) of the vehicle relative to the semantic map.
-
LiDAR-Camera Fusion: To further improve accuracy, the system fuses the monocular pose estimate with sparse 3D point cloud data from "accurate cooperative localization utilizing LiDAR-equipped roadside" infrastructure.
Through extensive experiments, the authors demonstrate that their approach can achieve centimeter-level localization accuracy, outperforming state-of-the-art methods that rely solely on monocular cameras or LiDAR.
Critical Analysis
The paper presents a compelling solution for accurate and cost-effective localization in autonomous vehicles. The use of a pre-built semantic map, combined with monocular camera data, is an innovative approach that addresses the limitations of traditional LiDAR-based systems.
However, the authors acknowledge several caveats and areas for further research:
-
Map Dependency: The system's performance is dependent on the availability and accuracy of the pre-built semantic map. Maintaining and updating these maps at scale could be a significant challenge.
-
Computational Complexity: The authors mention that the pose estimation algorithm is computationally intensive, which could be a concern for real-time deployment in vehicles.
-
Sensor Synchronization: Proper synchronization between the monocular camera and the sparse LiDAR data is critical for accurate fusion, which may be difficult to achieve in practice.
-
Environmental Conditions: The paper does not address how the system might perform in diverse environmental conditions, such as poor lighting, inclement weather, or dynamic scenes with moving objects.
Further research could explore ways to address these limitations, such as developing more efficient localization algorithms, exploring alternative map representations, or investigating the system's robustness to environmental factors.
Conclusion
This paper presents a novel approach for accurate monocular positioning in autonomous vehicles, leveraging a pre-built semantic map and sparse LiDAR data. The key innovation is the ability to achieve centimeter-level localization accuracy using a cost-effective sensor setup, without the need for a full LiDAR system on every vehicle.
The findings of this research have significant implications for the development of more affordable and scalable self-driving car technologies. By reducing the sensor requirements, the proposed method can help make autonomous driving more accessible and accelerate its widespread adoption. As the authors demonstrate, the integration of semantic map data with monocular vision can be a powerful technique for reliable and precise vehicle localization.
While the approach has some limitations that require further investigation, this work represents an important step towards the realization of practical and ubiquitous autonomous driving systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Accurate Prior-centric Monocular Positioning with Offline LiDAR Fusion
Jinhao He, Huaiyang Huang, Shuyang Zhang, Jianhao Jiao, Chengju Liu, Ming Liu
Unmanned vehicles usually rely on Global Positioning System (GPS) and Light Detection and Ranging (LiDAR) sensors to achieve high-precision localization results for navigation purpose. However, this combination with their associated costs and infrastructure demands, poses challenges for widespread adoption in mass-market applications. In this paper, we aim to use only a monocular camera to achieve comparable onboard localization performance by tracking deep-learning visual features on a LiDAR-enhanced visual prior map. Experiments show that the proposed algorithm can provide centimeter-level global positioning results with scale, which is effortlessly integrated and favorable for low-cost robot system deployment in real-world applications.
Read more7/15/2024

0
LVCP: LiDAR-Vision Tightly Coupled Collaborative Real-time Relative Positioning
Zhuozhu Jian, Qixuan Li, Shengtao Zheng, Xueqian Wang, Xinlei Chen
In air-ground collaboration scenarios without GPS and prior maps, the relative positioning of drones and unmanned ground vehicles (UGVs) has always been a challenge. For a drone equipped with monocular camera and an UGV equipped with LiDAR as an external sensor, we propose a robust and real-time relative pose estimation method (LVCP) based on the tight coupling of vision and LiDAR point cloud information, which does not require prior information such as maps or precise initial poses. Given that large-scale point clouds generated by 3D sensors has more accurate spatial geometric information than the feature point cloud generated by image, we utilize LiDAR point clouds to correct the drift in visual-inertial odometry (VIO) when the camera undergoes significant shaking or the IMU has a low signal-to-noise ratio. To achieve this, we propose a novel coarse-to-fine framework for LiDAR-vision collaborative localization. In this framework, we construct point-plane association based on spatial geometric information, and innovatively construct a point-aided Bundle Adjustment (BA) problem as the backend to simultaneously estimate the relative pose of the camera and LiDAR and correct the VIO drift. In this process, we propose a particle swarm optimization (PSO) based sampling algorithm to complete the coarse estimation of the current camera-LiDAR pose. In this process, the initial pose of the camera used for sampling is obtained based on VIO propagation, and the valid feature-plane association number (VFPN) is used to trigger PSO-sampling process. Additionally, we propose a method that combines Structure from Motion (SFM) and multi-level sampling to initialize the algorithm, addressing the challenge of lacking initial values.
Read more7/16/2024
0
Better Monocular 3D Detectors with LiDAR from the Past
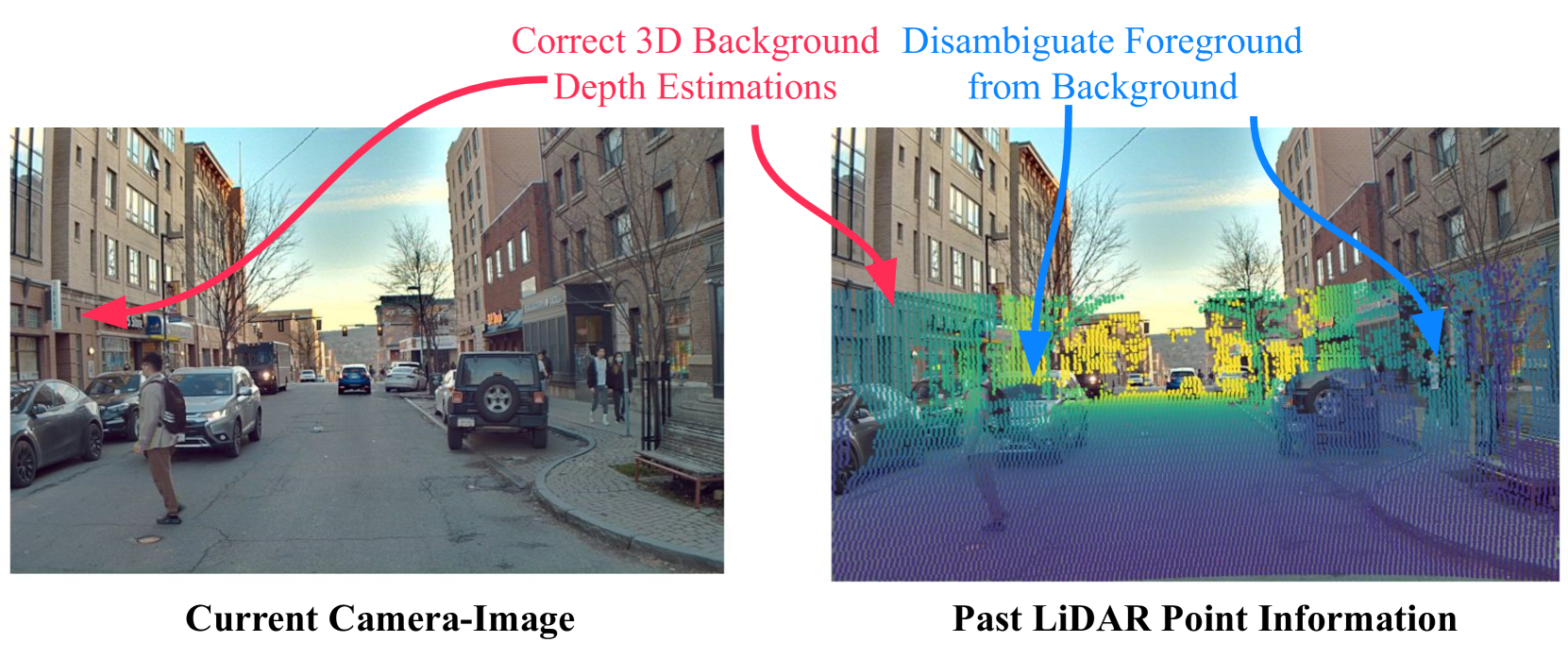
Yurong You, Cheng Perng Phoo, Carlos Andres Diaz-Ruiz, Katie Z Luo, Wei-Lun Chao, Mark Campbell, Bharath Hariharan, Kilian Q Weinberger
Accurate 3D object detection is crucial to autonomous driving. Though LiDAR-based detectors have achieved impressive performance, the high cost of LiDAR sensors precludes their widespread adoption in affordable vehicles. Camera-based detectors are cheaper alternatives but often suffer inferior performance compared to their LiDAR-based counterparts due to inherent depth ambiguities in images. In this work, we seek to improve monocular 3D detectors by leveraging unlabeled historical LiDAR data. Specifically, at inference time, we assume that the camera-based detectors have access to multiple unlabeled LiDAR scans from past traversals at locations of interest (potentially from other high-end vehicles equipped with LiDAR sensors). Under this setup, we proposed a novel, simple, and end-to-end trainable framework, termed AsyncDepth, to effectively extract relevant features from asynchronous LiDAR traversals of the same location for monocular 3D detectors. We show consistent and significant performance gain (up to 9 AP) across multiple state-of-the-art models and datasets with a negligible additional latency of 9.66 ms and a small storage cost.
Read more4/11/2024

0
Monocular Localization with Semantics Map for Autonomous Vehicles
Jixiang Wan, Xudong Zhang, Shuzhou Dong, Yuwei Zhang, Yuchen Yang, Ruoxi Wu, Ye Jiang, Jijunnan Li, Jinquan Lin, Ming Yang
Accurate and robust localization remains a significant challenge for autonomous vehicles. The cost of sensors and limitations in local computational efficiency make it difficult to scale to large commercial applications. Traditional vision-based approaches focus on texture features that are susceptible to changes in lighting, season, perspective, and appearance. Additionally, the large storage size of maps with descriptors and complex optimization processes hinder system performance. To balance efficiency and accuracy, we propose a novel lightweight visual semantic localization algorithm that employs stable semantic features instead of low-level texture features. First, semantic maps are constructed offline by detecting semantic objects, such as ground markers, lane lines, and poles, using cameras or LiDAR sensors. Then, online visual localization is performed through data association of semantic features and map objects. We evaluated our proposed localization framework in the publicly available KAIST Urban dataset and in scenarios recorded by ourselves. The experimental results demonstrate that our method is a reliable and practical localization solution in various autonomous driving localization tasks.
Read more6/7/2024