Machine Learning Models for Improved Tracking from Range-Doppler Map Images

0
Sign in to get full access
Overview
- This paper explores the use of machine learning models to improve target tracking from range-doppler map images, with support from the Defense Advanced Research Projects Agency (DARPA).
- The research focuses on developing neural networks for tasks such as target detection, uncertainty estimation, and multi-target tracking in the context of ground moving target indicator (GMTI) radars.
Plain English Explanation
The paper discusses how researchers are using advanced machine learning techniques, like neural networks, to enhance the performance of radar systems used for tracking moving targets. Radar systems work by sending out radio waves and analyzing the echoes that bounce back, which can reveal information about the location and speed of objects. However, interpreting this radar data can be challenging, especially when trying to track multiple targets at once.
The researchers in this study explored ways to use neural networks, a type of machine learning model, to improve the radar's ability to detect targets, estimate the uncertainty in its measurements, and keep track of multiple targets as they move around (multi-object tracking). This could be useful for military and security applications, where quickly and accurately identifying and tracking moving objects is crucial.
By leveraging the power of neural networks to analyze the radar's "range-doppler maps" (images that show the distance and speed of detected objects), the researchers were able to develop systems that performed better than traditional radar processing methods. This data-driven approach to target localization could lead to significant improvements in the reliability and effectiveness of radar-based tracking systems.
Technical Explanation
The paper investigates the use of neural networks for improved target tracking from range-doppler map images, which are generated by ground moving target indicator (GMTI) radars. The researchers developed several neural network architectures to address key challenges in radar-based tracking, including:
- Target Detection: The team trained neural networks to detect the presence of targets in the range-doppler maps, outperforming traditional detection algorithms.
- Uncertainty Estimation: The researchers developed neural networks that could estimate the uncertainty associated with the target detections, providing valuable information about the reliability of the tracking system.
- Multi-Target Tracking: The team explored neural network-based approaches to tracking multiple targets simultaneously, an important capability for real-world applications like 3D multi-vehicle tracking using radar data.
The paper presents experimental results demonstrating the effectiveness of the proposed neural network models in improving tracking performance compared to conventional methods. The authors also discuss the potential for further enhancements through multi-task learning, where a single neural network is trained to perform multiple related tasks simultaneously.
Critical Analysis
The paper provides a comprehensive exploration of neural network-based approaches to enhance radar-based target tracking, addressing important challenges such as detection, uncertainty estimation, and multi-target tracking. The experimental results are promising and suggest that the proposed techniques can lead to significant improvements in the reliability and effectiveness of radar-based tracking systems.
However, the paper does not delve deeply into the potential limitations or practical challenges of deploying these neural network models in real-world scenarios. For example, the authors do not discuss the computational requirements or the robustness of the models to noisy or incomplete data, which are crucial considerations for real-time tracking applications.
Additionally, the paper could have examined the explainability and interpretability of the neural network models, as this is an important concern in safety-critical applications where the decision-making process must be well-understood. Further research could explore ways to enhance the interpretability of the neural network models used for radar-based tracking.
Conclusion
This paper presents a promising approach to improving target tracking from range-doppler map images using advanced machine learning techniques, specifically neural networks. The researchers' work on target detection, uncertainty estimation, and multi-target tracking demonstrates the potential of data-driven methods to enhance the reliability and effectiveness of radar-based tracking systems.
The findings of this study could have significant implications for various applications, such as military, security, and transportation, where accurate and reliable target tracking is essential. The continued development and refinement of these neural network-based tracking approaches, combined with a deeper understanding of their limitations and practical challenges, could lead to transformative advancements in radar-based perception and decision-making systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Machine Learning Models for Improved Tracking from Range-Doppler Map Images
Elizabeth Hou, Ross Greenwood, Piyush Kumar
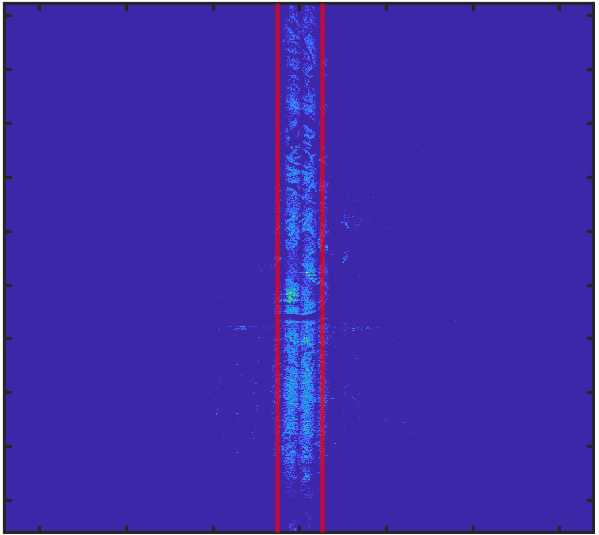
Statistical tracking filters depend on accurate target measurements and uncertainty estimates for good tracking performance. In this work, we propose novel machine learning models for target detection and uncertainty estimation in range-Doppler map (RDM) images for Ground Moving Target Indicator (GMTI) radars. We show that by using the outputs of these models, we can significantly improve the performance of a multiple hypothesis tracker for complex multi-target air-to-ground tracking scenarios.
Read more7/4/2024

0
Continuously Optimizing Radar Placement with Model Predictive Path Integrals
Michael Potter, Shuo Tang, Paul Ghanem, Milica Stojanovic, Pau Closas, Murat Akcakaya, Ben Wright, Marius Necsoiu, Deniz Erdogmus, Michael Everett, Tales Imbiriba
Continuously optimizing sensor placement is essential for precise target localization in various military and civilian applications. While information theory has shown promise in optimizing sensor placement, many studies oversimplify sensor measurement models or neglect dynamic constraints of mobile sensors. To address these challenges, we employ a range measurement model that incorporates radar parameters and radar-target distance, coupled with Model Predictive Path Integral (MPPI) control to manage complex environmental obstacles and dynamic constraints. We compare the proposed approach against stationary radars or simplified range measurement models based on the root mean squared error (RMSE) of the Cubature Kalman Filter (CKF) estimator for the targets' state. Additionally, we visualize the evolving geometry of radars and targets over time, highlighting areas of highest measurement information gain, demonstrating the strengths of the approach. The proposed strategy outperforms stationary radars and simplified range measurement models in target localization, achieving a 38-74% reduction in mean RMSE and a 33-79% reduction in the upper tail of the 90% Highest Density Interval (HDI) over 500 Monte Carl (MC) trials across all time steps. Code will be made publicly available upon acceptance.
Read more5/31/2024
🔎
0
Multi-Object Tracking based on Imaging Radar 3D Object Detection
Patrick Palmer, Martin Kruger, Richard Altendorfer, Torsten Bertram
Effective tracking of surrounding traffic participants allows for an accurate state estimation as a necessary ingredient for prediction of future behavior and therefore adequate planning of the ego vehicle trajectory. One approach for detecting and tracking surrounding traffic participants is the combination of a learning based object detector with a classical tracking algorithm. Learning based object detectors have been shown to work adequately on lidar and camera data, while learning based object detectors using standard radar data input have proven to be inferior. Recently, with the improvements to radar sensor technology in the form of imaging radars, the object detection performance on radar was greatly improved but is still limited compared to lidar sensors due to the sparsity of the radar point cloud. This presents a unique challenge for the task of multi-object tracking. The tracking algorithm must overcome the limited detection quality while generating consistent tracks. To this end, a comparison between different multi-object tracking methods on imaging radar data is required to investigate its potential for downstream tasks. The work at hand compares multiple approaches and analyzes their limitations when applied to imaging radar data. Furthermore, enhancements to the presented approaches in the form of probabilistic association algorithms are considered for this task.
Read more6/4/2024

0
Data-Driven Target Localization: Benchmarking Gradient Descent Using the Cramer-Rao Bound
Shyam Venkatasubramanian, Sandeep Gogineni, Bosung Kang, Muralidhar Rangaswamy
In modern radar systems, precise target localization using azimuth and velocity estimation is paramount. Traditional unbiased estimation methods have utilized gradient descent algorithms to reach the theoretical limits of the Cramer Rao Bound (CRB) for the error of the parameter estimates. As an extension, we demonstrate on a realistic simulated example scenario that our earlier presented data-driven neural network model outperforms these traditional methods, yielding improved accuracies in target azimuth and velocity estimation. We emphasize, however, that this improvement does not imply that the neural network outperforms the CRB itself. Rather, the enhanced performance is attributed to the biased nature of the neural network approach. Our findings underscore the potential of employing deep learning methods in radar systems to achieve more accurate localization in cluttered and dynamic environments.
Read more4/24/2024