Data-Driven Target Localization: Benchmarking Gradient Descent Using the Cramer-Rao Bound

0

Sign in to get full access
Overview
- This paper explores a data-driven approach to target localization using gradient descent and the Cramér-Rao Bound (CRB) as a benchmark.
- The researchers used the RFView® simulation platform to generate realistic radar data and evaluate the performance of their gradient descent-based localization method.
- The paper compares the results of the data-driven approach to the theoretical CRB, providing insights into the limits of gradient descent-based localization.
Plain English Explanation
This research paper looks at a new way to use radar data to figure out the location of targets. The researchers used a computer simulation called RFView® to generate realistic radar data, which they then fed into a machine learning algorithm that uses gradient descent to estimate the target's location.
Gradient descent is a common technique used in machine learning to find the best possible solution to a problem. In this case, the goal is to find the target's location based on the radar data. The researchers compared the results of their gradient descent-based approach to the theoretical Cramér-Rao Bound (CRB), which is a statistical measure that tells you the best possible accuracy you can achieve for a given problem.
By comparing their results to the CRB, the researchers were able to understand the limits of the gradient descent-based localization method and identify areas where it could be improved. This kind of benchmarking is important for developing more accurate and reliable radar-based target localization systems, which have many applications in fields like enhanced radar perception, autonomous vehicles, and robotics.
Technical Explanation
The researchers used the RFView® simulation platform to generate realistic radar data, which they then used to train and evaluate a data-driven target localization algorithm based on gradient descent. RFView® is a comprehensive radar simulation environment that can model various radar systems, target scenarios, and environmental conditions.
The gradient descent-based localization algorithm leverages the radar data to estimate the target's position and orientation. The researchers compared the performance of this data-driven approach to the theoretical Cramér-Rao Bound (CRB), which provides a lower bound on the variance of any unbiased estimator of the target's parameters.
By benchmarking the gradient descent-based localization against the CRB, the researchers were able to assess the limits of this data-driven approach and identify areas for potential improvement. For example, the paper discusses how the performance of the gradient descent-based method is affected by factors such as signal-to-noise ratio, the number of radar pulses, and the complexity of the target scene.
The researchers also explored the impact of neural network architecture and hyperparameter tuning on the localization accuracy, providing valuable insights for future developments in this area.
Critical Analysis
The paper provides a comprehensive and rigorous evaluation of the data-driven target localization approach using gradient descent. The authors have clearly demonstrated the potential of this method and its limitations by comparing the results to the theoretical CRB.
One potential concern is the reliance on the RFView® simulation platform, which may not fully capture the complexities of real-world radar scenarios. While the simulation is designed to be realistic, it is still a simplification of the actual environment, and the performance of the gradient descent-based method may differ when applied to real-world data.
Additionally, the paper does not explore the robustness of the algorithm to noise, clutter, or other real-world challenges that are often present in radar systems. Further research is needed to assess the algorithm's performance in more complex and realistic scenarios.
The paper also does not provide much discussion on the computational complexity and runtime of the gradient descent-based localization method, which could be an important consideration for practical applications, especially in time-critical scenarios.
Overall, the research provides valuable insights and a solid foundation for further developments in data-driven radar target localization. However, additional studies are needed to fully understand the capabilities and limitations of this approach in real-world settings.
Conclusion
This research paper presents a data-driven approach to target localization using gradient descent and benchmarks its performance against the theoretical Cramér-Rao Bound. By leveraging the RFView® simulation platform, the researchers were able to evaluate their method in a realistic radar environment and gain insights into its strengths and weaknesses.
The findings of this study have important implications for the development of more accurate and reliable radar-based target localization systems, which are crucial for a wide range of applications, including enhanced radar perception, autonomous vehicles, and robotics. The benchmarking approach used in this paper can also serve as a valuable framework for evaluating other data-driven radar processing techniques and identifying areas for further improvement.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Data-Driven Target Localization: Benchmarking Gradient Descent Using the Cramer-Rao Bound
Shyam Venkatasubramanian, Sandeep Gogineni, Bosung Kang, Muralidhar Rangaswamy
In modern radar systems, precise target localization using azimuth and velocity estimation is paramount. Traditional unbiased estimation methods have utilized gradient descent algorithms to reach the theoretical limits of the Cramer Rao Bound (CRB) for the error of the parameter estimates. As an extension, we demonstrate on a realistic simulated example scenario that our earlier presented data-driven neural network model outperforms these traditional methods, yielding improved accuracies in target azimuth and velocity estimation. We emphasize, however, that this improvement does not imply that the neural network outperforms the CRB itself. Rather, the enhanced performance is attributed to the biased nature of the neural network approach. Our findings underscore the potential of employing deep learning methods in radar systems to achieve more accurate localization in cluttered and dynamic environments.
Read more4/24/2024
0
Machine Learning Models for Improved Tracking from Range-Doppler Map Images
Elizabeth Hou, Ross Greenwood, Piyush Kumar
Statistical tracking filters depend on accurate target measurements and uncertainty estimates for good tracking performance. In this work, we propose novel machine learning models for target detection and uncertainty estimation in range-Doppler map (RDM) images for Ground Moving Target Indicator (GMTI) radars. We show that by using the outputs of these models, we can significantly improve the performance of a multiple hypothesis tracker for complex multi-target air-to-ground tracking scenarios.
Read more7/4/2024
🖼️
0
CBGL: Fast Monte Carlo Passive Global Localisation of 2D LIDAR Sensor
Alexandros Filotheou
Navigation of a mobile robot is conditioned on the knowledge of its pose. In observer-based localisation configurations its initial pose may not be knowable in advance, leading to the need of its estimation. Solutions to the problem of global localisation are either robust against noise and environment arbitrariness but require motion and time, which may (need to) be economised on, or require minimal estimation time but assume environmental structure, may be sensitive to noise, and demand preprocessing and tuning. This article proposes a method that retains the strengths and avoids the weaknesses of the two approaches. The method leverages properties of the Cumulative Absolute Error per Ray (CAER) metric with respect to the errors of pose hypotheses of a 2D LIDAR sensor, and utilises scan--to--map-scan matching for fine(r) pose estimations. A large number of tests, in real and simulated conditions, involving disparate environments and sensor properties, illustrate that the proposed method outperforms state-of-the-art methods of both classes of solutions in terms of pose discovery rate and execution time. The source code is available for download.
Read more7/8/2024
0
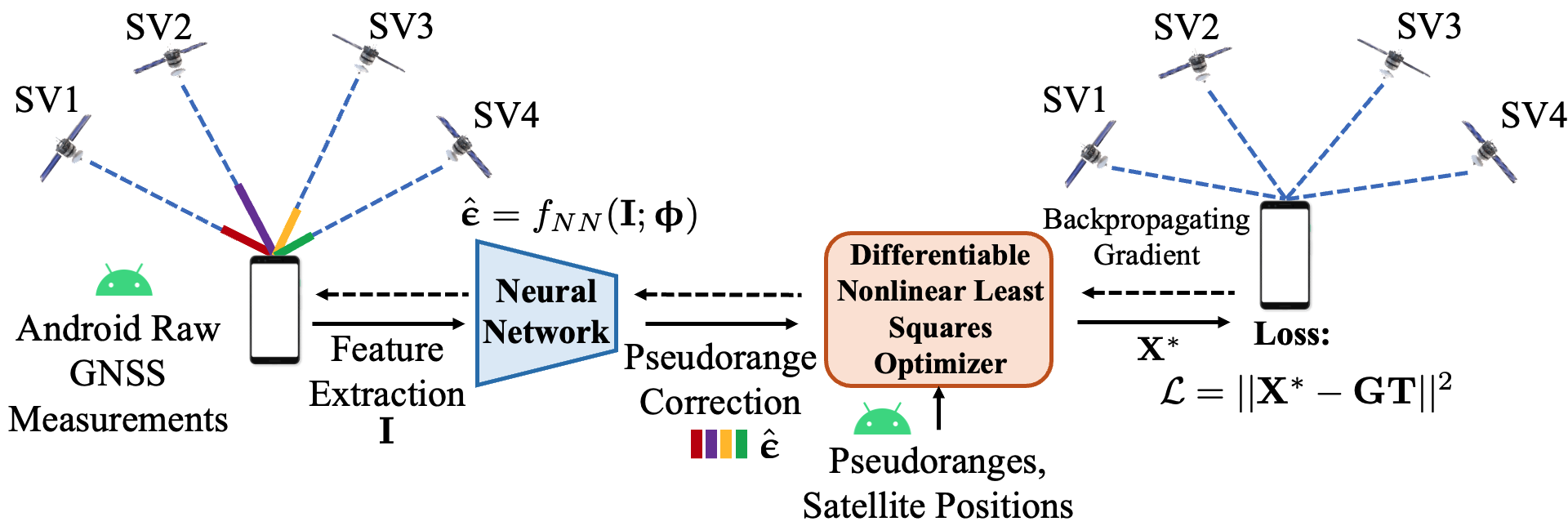
Towards End-to-End GPS Localization with Neural Pseudorange Correction
Xu Weng, KV Ling, Haochen Liu, Kun Cao
The pseudorange error is one of the root causes of localization inaccuracy in GPS. Previous data-driven methods regress and eliminate pseudorange errors using handcrafted intermediate labels. Unlike them, we propose an end-to-end GPS localization framework, E2E-PrNet, to train a neural network for pseudorange correction (PrNet) directly using the final task loss calculated with the ground truth of GPS receiver states. The gradients of the loss with respect to learnable parameters are backpropagated through a Differentiable Nonlinear Least Squares (DNLS) optimizer to PrNet. The feasibility of fusing the data-driven neural network and the model-based DNLS module is verified with GPS data collected by Android phones, showing that E2E-PrNet outperforms the baseline weighted least squares method and the state-of-the-art end-to-end data-driven approach. Finally, we discuss the explainability of E2E-PrNet.
Read more8/22/2024