Making Large Language Models Better Planners with Reasoning-Decision Alignment

0

Sign in to get full access
Overview
- This paper explores ways to make large language models (LLMs) better at planning and decision-making for autonomous driving tasks.
- The key idea is to align the LLM's reasoning process with its final decision-making, a concept called "reasoning-decision alignment."
- This approach aims to improve the LLM's ability to plan effective driving strategies and make safer, more reliable decisions.
Plain English Explanation
The paper focuses on making large language models (LLMs) better at planning and decision-making for autonomous driving. LLMs are powerful AI systems that can understand and generate human-like language, but they can struggle with complex real-world tasks like driving.
The researchers propose a concept called "reasoning-decision alignment" to address this. The idea is to ensure that the LLM's reasoning process, where it considers different options and scenarios, is directly connected to its final decision-making. This helps the LLM make safer and more reliable driving decisions, as its thought process is aligned with its actions.
For example, imagine an autonomous car approaching a busy intersection. The LLM would need to consider factors like traffic patterns, pedestrian movements, and road conditions to plan the best course of action. With reasoning-decision alignment, the LLM's reasoning about these factors would be directly linked to its final decision on how to navigate the intersection safely.
By aligning the LLM's reasoning and decision-making, the researchers aim to improve the model's ability to plan effective driving strategies and make better decisions in complex, real-world scenarios. This could lead to more capable and reliable autonomous driving systems in the future.
Technical Explanation
The paper proposes a new approach called "Reasoning-Decision Alignment" (RDA) to improve the planning and decision-making capabilities of large language models (LLMs) in autonomous driving tasks.
The core idea is to align the LLM's reasoning process, where it considers different options and scenarios, with its final decision-making. This is achieved by introducing an additional "decision module" that takes the LLM's reasoning outputs and generates the final driving actions.
The researchers describe a two-stage training process:
-
Reasoning Stage: The LLM is trained to generate a rich set of reasoning outputs, such as predicted future states, risks, and driving strategies, given the current driving context.
-
Decision Stage: The decision module is trained to map the LLM's reasoning outputs to the final driving actions, ensuring that the reasoning is directly connected to the decisions.
This RDA approach is evaluated on a simulated autonomous driving task, where the LLM-based planner is required to navigate a vehicle through complex, dynamic environments. The results show that the RDA-driven LLM outperforms baseline LLM planners, demonstrating improved planning and decision-making capabilities.
The authors suggest that the RDA approach can help address some of the key challenges in using LLMs for autonomous driving, such as the need for better reasoning, planning, and reliable decision-making.
Critical Analysis
The paper presents a promising approach to improving the planning and decision-making capabilities of LLMs in autonomous driving tasks. The reasoning-decision alignment concept is a thoughtful way to bridge the gap between the LLM's language understanding and its ability to make safe, effective driving decisions.
One potential limitation is that the evaluation is conducted in a simulated environment, which may not fully capture the complexity and unpredictability of real-world driving scenarios. Further testing in more realistic environments or even on-road experiments would be valuable to assess the approach's performance and robustness in practical settings.
Additionally, the paper does not provide a detailed discussion of potential issues or failure modes of the RDA approach. For example, it would be interesting to explore how the system might handle edge cases, such as rare or unexpected driving situations, and how the reasoning-decision alignment could be made more robust in the face of such challenges.
Overall, the proposed RDA approach is a thoughtful and promising step towards improving the planning and decision-making capabilities of LLMs in autonomous driving applications. Further research and real-world testing could help to refine and validate the approach, paving the way for more capable and reliable autonomous driving systems in the future.
Conclusion
This paper presents a novel approach called "Reasoning-Decision Alignment" (RDA) to enhance the planning and decision-making capabilities of large language models (LLMs) in autonomous driving tasks. The key idea is to align the LLM's reasoning process with its final driving decisions, ensuring that the model's understanding of the driving context is directly reflected in its actions.
The RDA approach involves a two-stage training process that first trains the LLM to generate rich reasoning outputs and then trains a decision module to map those outputs to the final driving actions. Evaluation on a simulated driving task shows that the RDA-driven LLM outperforms baseline LLM planners, demonstrating the potential of this approach to improve the overall performance and reliability of autonomous driving systems.
While the paper provides a solid foundation, further research and real-world testing would be valuable to fully assess the RDA approach's capabilities and limitations. Exploring its handling of edge cases, its robustness in unpredictable environments, and its practical implementation in actual autonomous vehicles could help refine and validate the approach, ultimately paving the way for more capable and trustworthy autonomous driving systems powered by advanced language models.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Making Large Language Models Better Planners with Reasoning-Decision Alignment
Zhijian Huang, Tao Tang, Shaoxiang Chen, Sihao Lin, Zequn Jie, Lin Ma, Guangrun Wang, Xiaodan Liang
Data-driven approaches for autonomous driving (AD) have been widely adopted in the past decade but are confronted with dataset bias and uninterpretability. Inspired by the knowledge-driven nature of human driving, recent approaches explore the potential of large language models (LLMs) to improve understanding and decision-making in traffic scenarios. They find that the pretrain-finetune paradigm of LLMs on downstream data with the Chain-of-Thought (CoT) reasoning process can enhance explainability and scene understanding. However, such a popular strategy proves to suffer from the notorious problems of misalignment between the crafted CoTs against the consequent decision-making, which remains untouched by previous LLM-based AD methods. To address this problem, we motivate an end-to-end decision-making model based on multimodality-augmented LLM, which simultaneously executes CoT reasoning and carries out planning results. Furthermore, we propose a reasoning-decision alignment constraint between the paired CoTs and planning results, imposing the correspondence between reasoning and decision-making. Moreover, we redesign the CoTs to enable the model to comprehend complex scenarios and enhance decision-making performance. We dub our proposed large language planners with reasoning-decision alignment as RDA-Driver. Experimental evaluations on the nuScenes and DriveLM-nuScenes benchmarks demonstrate the effectiveness of our RDA-Driver in enhancing the performance of end-to-end AD systems. Specifically, our RDA-Driver achieves state-of-the-art planning performance on the nuScenes dataset with 0.80 L2 error and 0.32 collision rate, and also achieves leading results on challenging DriveLM-nuScenes benchmarks with 0.82 L2 error and 0.38 collision rate.
Read more8/27/2024

0
Hybrid Reasoning Based on Large Language Models for Autonomous Car Driving
Mehdi Azarafza, Mojtaba Nayyeri, Charles Steinmetz, Steffen Staab, Achim Rettberg
Large Language Models (LLMs) have garnered significant attention for their ability to understand text and images, generate human-like text, and perform complex reasoning tasks. However, their ability to generalize this advanced reasoning with a combination of natural language text for decision-making in dynamic situations requires further exploration. In this study, we investigate how well LLMs can adapt and apply a combination of arithmetic and common-sense reasoning, particularly in autonomous driving scenarios. We hypothesize that LLMs hybrid reasoning abilities can improve autonomous driving by enabling them to analyze detected object and sensor data, understand driving regulations and physical laws, and offer additional context. This addresses complex scenarios, like decisions in low visibility (due to weather conditions), where traditional methods might fall short. We evaluated Large Language Models (LLMs) based on accuracy by comparing their answers with human-generated ground truth inside CARLA. The results showed that when a combination of images (detected objects) and sensor data is fed into the LLM, it can offer precise information for brake and throttle control in autonomous vehicles across various weather conditions. This formulation and answers can assist in decision-making for auto-pilot systems.
Read more8/20/2024
0
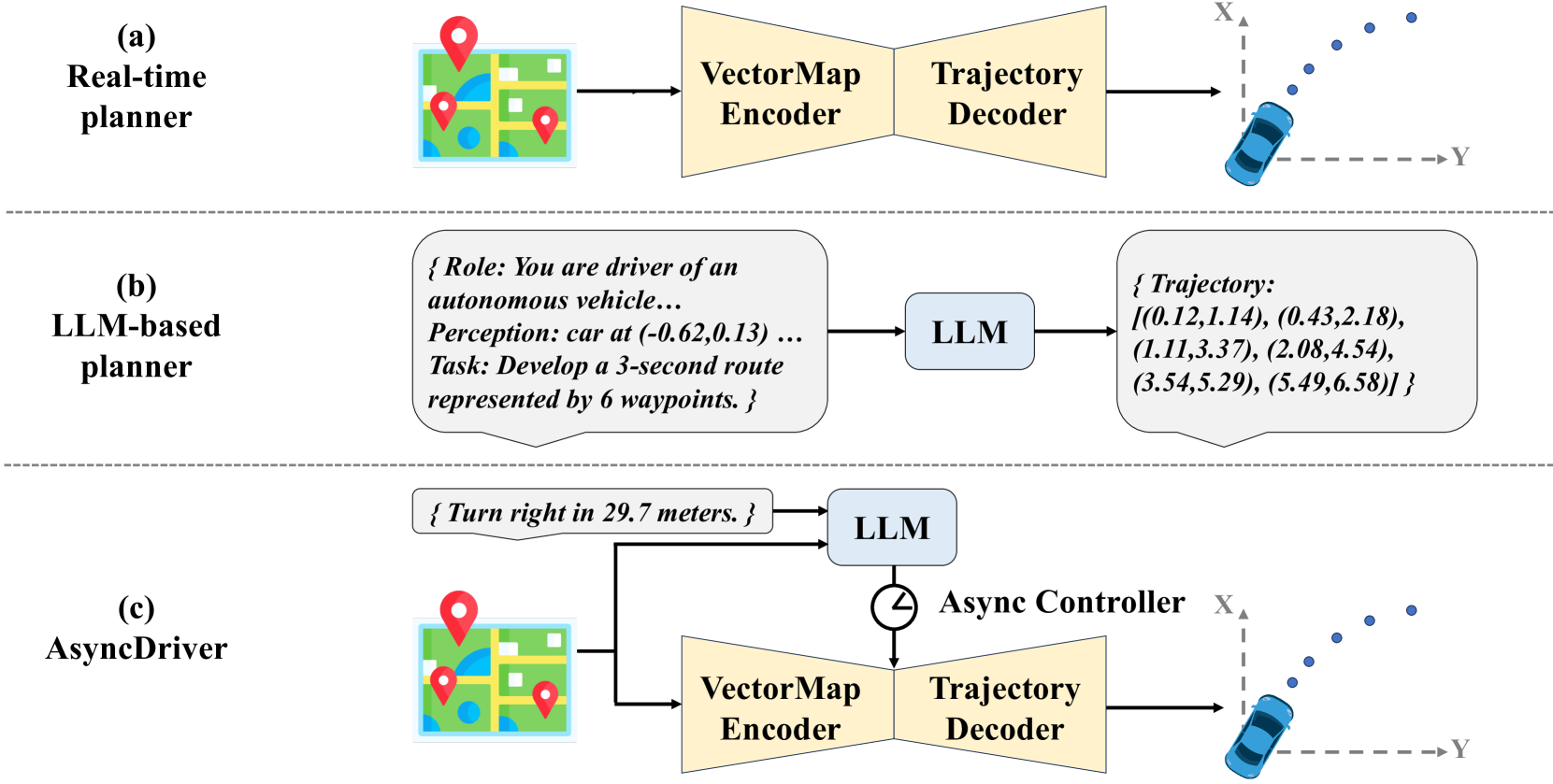
Asynchronous Large Language Model Enhanced Planner for Autonomous Driving
Yuan Chen, Zi-han Ding, Ziqin Wang, Yan Wang, Lijun Zhang, Si Liu
Despite real-time planners exhibiting remarkable performance in autonomous driving, the growing exploration of Large Language Models (LLMs) has opened avenues for enhancing the interpretability and controllability of motion planning. Nevertheless, LLM-based planners continue to encounter significant challenges, including elevated resource consumption and extended inference times, which pose substantial obstacles to practical deployment. In light of these challenges, we introduce AsyncDriver, a new asynchronous LLM-enhanced closed-loop framework designed to leverage scene-associated instruction features produced by LLM to guide real-time planners in making precise and controllable trajectory predictions. On one hand, our method highlights the prowess of LLMs in comprehending and reasoning with vectorized scene data and a series of routing instructions, demonstrating its effective assistance to real-time planners. On the other hand, the proposed framework decouples the inference processes of the LLM and real-time planners. By capitalizing on the asynchronous nature of their inference frequencies, our approach have successfully reduced the computational cost introduced by LLM, while maintaining comparable performance. Experiments show that our approach achieves superior closed-loop evaluation performance on nuPlan's challenging scenarios.
Read more7/25/2024

0
Large Language Models for Human-like Autonomous Driving: A Survey
Yun Li, Kai Katsumata, Ehsan Javanmardi, Manabu Tsukada
Large Language Models (LLMs), AI models trained on massive text corpora with remarkable language understanding and generation capabilities, are transforming the field of Autonomous Driving (AD). As AD systems evolve from rule-based and optimization-based methods to learning-based techniques like deep reinforcement learning, they are now poised to embrace a third and more advanced category: knowledge-based AD empowered by LLMs. This shift promises to bring AD closer to human-like AD. However, integrating LLMs into AD systems poses challenges in real-time inference, safety assurance, and deployment costs. This survey provides a comprehensive and critical review of recent progress in leveraging LLMs for AD, focusing on their applications in modular AD pipelines and end-to-end AD systems. We highlight key advancements, identify pressing challenges, and propose promising research directions to bridge the gap between LLMs and AD, thereby facilitating the development of more human-like AD systems. The survey first introduces LLMs' key features and common training schemes, then delves into their applications in modular AD pipelines and end-to-end AD, respectively, followed by discussions on open challenges and future directions. Through this in-depth analysis, we aim to provide insights and inspiration for researchers and practitioners working at the intersection of AI and autonomous vehicles, ultimately contributing to safer, smarter, and more human-centric AD technologies.
Read more7/30/2024