Manipulator as a Tail: Promoting Dynamic Stability for Legged Locomotion

0
🌀
Sign in to get full access
Overview
- This paper explores how an arm on a legged robot can be an asset for high-speed locomotion and stabilization, rather than just a manipulation tool.
- Legged robots with 15 degrees of freedom (12 for the legs, 3 for the arm) struggle to learn effective locomotion policies using off-the-shelf reinforcement learning (RL) algorithms.
- The researchers develop an incremental training procedure inspired by Bernstein's theory of motor learning, which gradually releases degrees of freedom and uses behavior cloning to guide optimization.
- Simulation experiments show this policy can increase the success rate by up to 61 percentage points over baselines, by using the arm as a "tail" for high-speed turning and stabilization under external perturbations.
Plain English Explanation
Legged robots are designed to move around using their legs, but some also have an additional arm or limb. The researchers in this paper looked at how that extra arm can actually be an advantage for a legged robot's locomotion, rather than just being used for manipulation tasks.
Legged robots with a lot of moving parts (12 for the legs, 3 for the arm) can be really hard to control using standard machine learning techniques. The researchers tried a different approach, inspired by how animals learn new motor skills. They started by training the robot to move with just a few degrees of freedom unlocked, then gradually opened up more as the training progressed. This helped the robot learn effective ways to use its whole body, including the arm, for high-speed maneuvers and stabilizing itself against external forces.
In simulations, this approach led to big improvements - up to a 61% increase in success rate compared to standard methods. The robot learned to use its arm like a "tail" to help it turn quickly at high speeds, and to stabilize itself when pushed or shoved. This shows how an arm can be an asset, not just a liability, for a legged robot's locomotion capabilities.
Technical Explanation
The researchers investigated how a manipulator arm on a legged robot can be used to enhance its locomotion capabilities, beyond just being a tool for manipulation tasks. Biological systems have evolved additional limbs beyond legs that facilitate postural control and stability, and the researchers hypothesized that a manipulator arm could serve a similar function for legged robots.
The robot platform used in this work has 15 degrees of freedom - 12 for the legs and 3 for the arm. The researchers found that standard reinforcement learning algorithms struggled to learn effective locomotion policies for this high-dimensional system.
Inspired by Bernstein's neurophysiological theory of motor learning, the researchers developed an incremental training procedure. This approach initially freezes some degrees of freedom and gradually releases them, using behavior cloning from an early learning procedure to guide optimization in later learning stages.
Simulation experiments showed that this policy was able to increase the success rate by up to 61 percentage points over baselines. Further analysis revealed that the policy learns to use the arm as a "tail" to initiate rapid turning maneuvers at high speeds, and to stabilize the quadruped robot under external perturbations. Quantitatively, the researchers found reductions in failure rates of up to 43.6% during high-speed turning and up to 31.8% for the quadruped under external forces, compared to using a locked arm.
Critical Analysis
The researchers provide compelling evidence that an arm can be an asset rather than a liability for legged robot locomotion, particularly in high-speed or perturbed environments. Their incremental training approach, inspired by principles of motor learning, appears to be an effective strategy for tackling the high-dimensional control problem.
However, the work is limited to simulation experiments, and it remains to be seen how well the learned policies would transfer to a real-world robotic system. The researchers acknowledge this limitation and suggest future work should focus on bridging the sim-to-real gap.
Additionally, the paper does not delve into the potential downsides or challenges of incorporating a manipulator arm into a legged robot design. There may be tradeoffs in terms of weight, size, or mechanical complexity that could offset the locomotion benefits. Further research would be needed to fully characterize the design space and identify the optimal configurations.
Overall, this work represents an interesting and valuable contribution to the field of legged robotics, demonstrating the potential for synergies between manipulation and locomotion capabilities. However, continued refinement and real-world validation will be necessary to fully realize the practical benefits of this approach.
Conclusion
This research paper presents a novel approach to leveraging a manipulator arm on a legged robot to enhance its locomotion capabilities, particularly in high-speed and perturbed environments. By developing an incremental training procedure inspired by principles of motor learning, the researchers were able to overcome the challenges of learning effective policies for this high-dimensional system.
The simulation experiments show promising results, with the arm-enabled policy outperforming baselines by significant margins in terms of success rate and stability under external forces. This suggests that an arm can be an asset rather than a liability for legged robot locomotion, providing additional degrees of freedom that can be used for stabilization and rapid maneuvering.
While this work is limited to simulation, it represents an important step forward in integrating manipulation and locomotion capabilities in robotic systems. Further research will be needed to translate these findings to real-world applications, but the potential benefits could have far-reaching implications for the field of legged robotics and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌀
0
Manipulator as a Tail: Promoting Dynamic Stability for Legged Locomotion
Huang Huang, Antonio Loquercio, Ashish Kumar, Neerja Thakkar, Ken Goldberg, Jitendra Malik
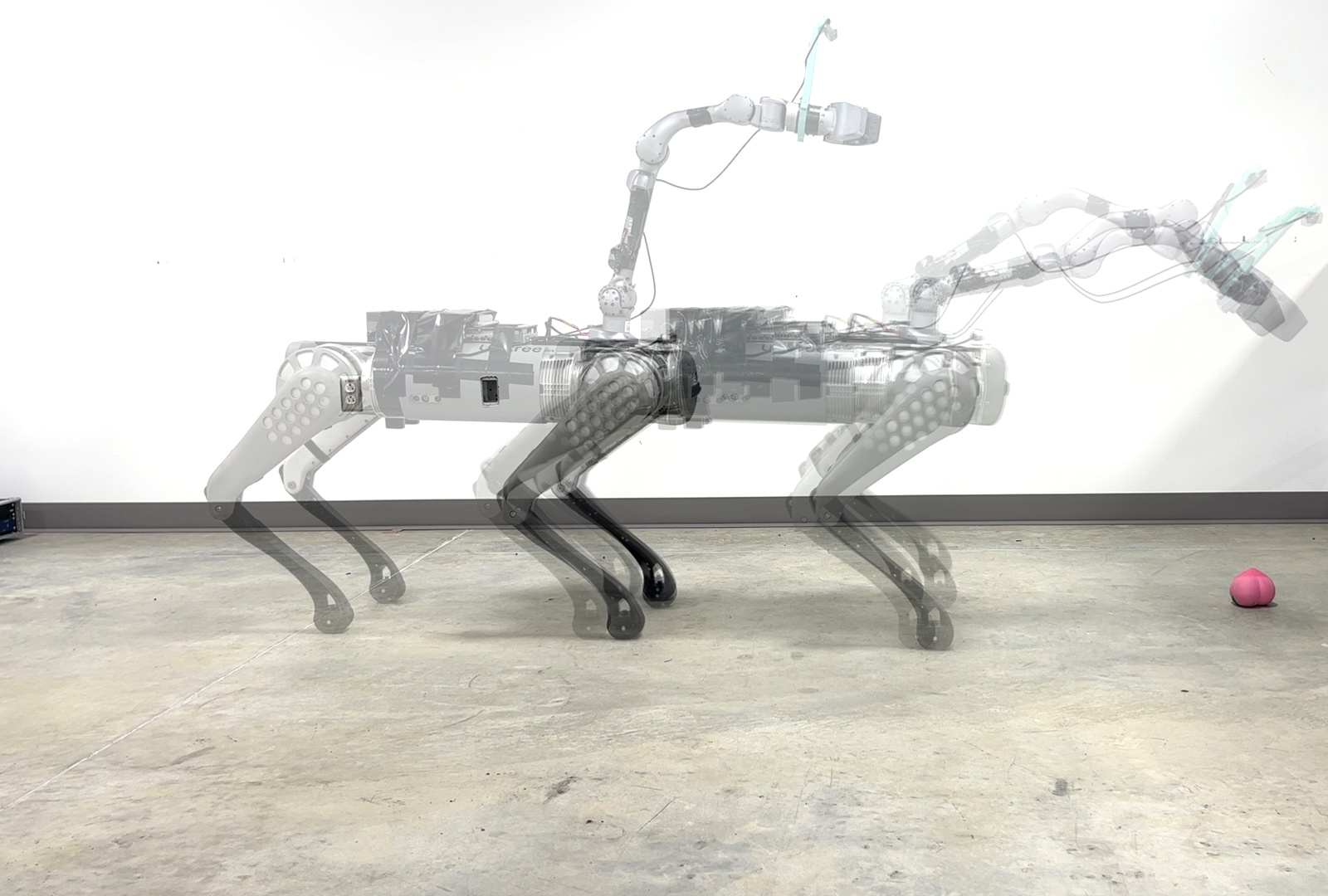
For locomotion, is an arm on a legged robot a liability or an asset for locomotion? Biological systems evolved additional limbs beyond legs that facilitates postural control. This work shows how a manipulator can be an asset for legged locomotion at high speeds or under external perturbations, where the arm serves beyond manipulation. Since the system has 15 degrees of freedom (twelve for the legged robot and three for the arm), off-the-shelf reinforcement learning (RL) algorithms struggle to learn effective locomotion policies. Inspired by Bernstein's neurophysiological theory of animal motor learning, we develop an incremental training procedure that initially freezes some degrees of freedom and gradually releases them, using behaviour cloning (BC) from an early learning procedure to guide optimization in later learning. Simulation experiments show that our policy increases the success rate by up to 61 percentage points over the baselines. Simulation and real robot experiments suggest that our policy learns to use the arm as a tail to initiate robot turning at high speeds and to stabilize the quadruped under external perturbations. Quantitatively, in simulation experiments, we cut the failure rate up to 43.6% during high-speed turning and up to 31.8% for quadruped under external forces compared to using a locked arm.
Read more7/26/2024

0
Learning Rapid Turning, Aerial Reorientation, and Balancing using Manipulator as a Tail
Insung Yang, Jemin Hwangbo
In this research, we investigated the innovative use of a manipulator as a tail in quadruped robots to augment their physical capabilities. Previous studies have primarily focused on enhancing various abilities by attaching robotic tails that function solely as tails on quadruped robots. While these tails improve the performance of the robots, they come with several disadvantages, such as increased overall weight and higher costs. To mitigate these limitations, we propose the use of a 6-DoF manipulator as a tail, allowing it to serve both as a tail and as a manipulator. To control this highly complex robot, we developed a controller based on reinforcement learning for the robot equipped with the manipulator. Our experimental results demonstrate that robots equipped with a manipulator outperform those without a manipulator in tasks such as rapid turning, aerial reorientation, and balancing. These results indicate that the manipulator can improve the agility and stability of quadruped robots, similar to a tail, in addition to its manipulation capabilities.
Read more7/16/2024
0
Visual Whole-Body Control for Legged Loco-Manipulation
Minghuan Liu, Zixuan Chen, Xuxin Cheng, Yandong Ji, Ri-Zhao Qiu, Ruihan Yang, Xiaolong Wang
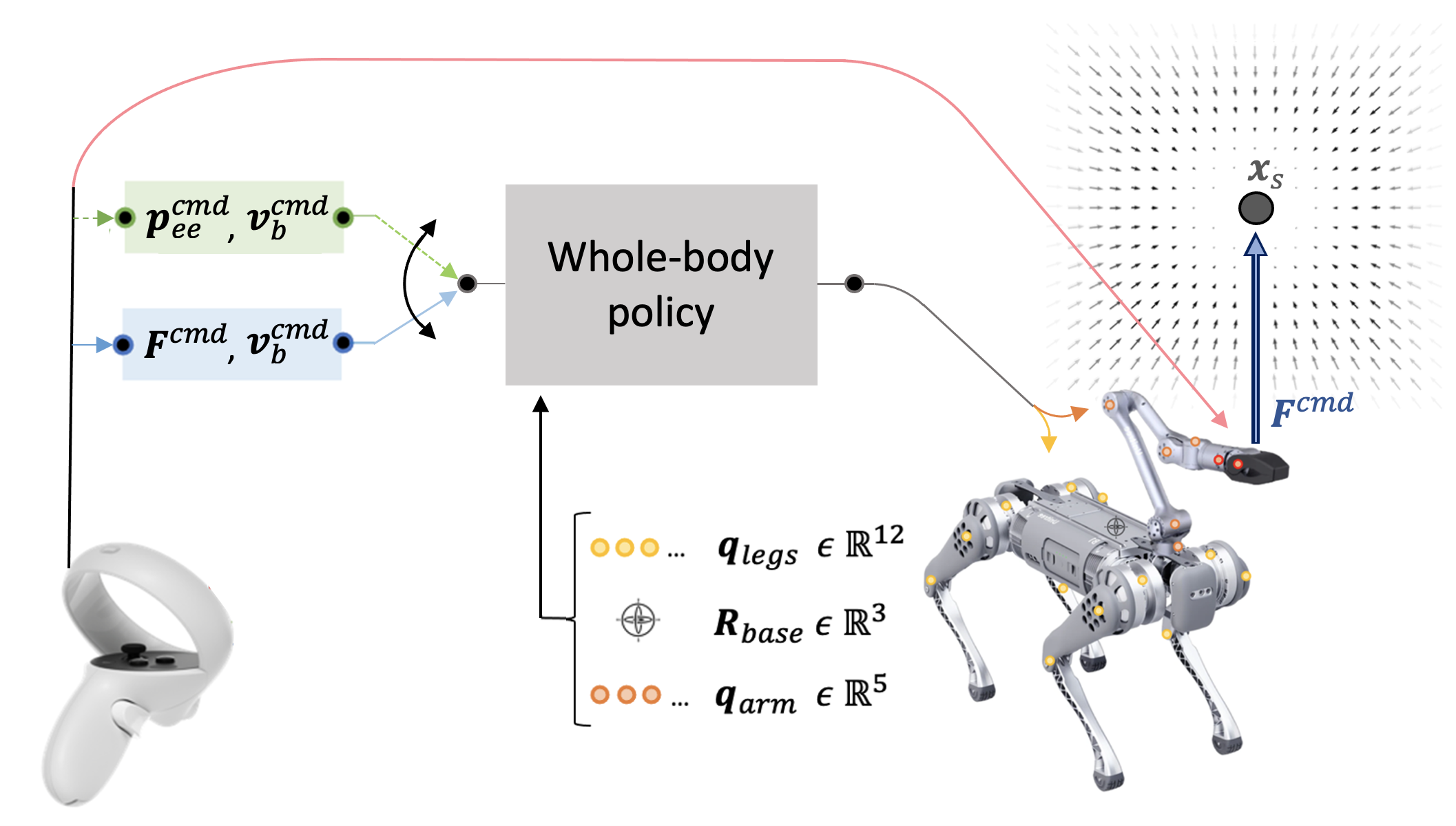
We study the problem of mobile manipulation using legged robots equipped with an arm, namely legged loco-manipulation. The robot legs, while usually utilized for mobility, offer an opportunity to amplify the manipulation capabilities by conducting whole-body control. That is, the robot can control the legs and the arm at the same time to extend its workspace. We propose a framework that can conduct the whole-body control autonomously with visual observations. Our approach, namely Visual Whole-Body Control(VBC), is composed of a low-level policy using all degrees of freedom to track the body velocities along with the end-effector position, and a high-level policy proposing the velocities and end-effector position based on visual inputs. We train both levels of policies in simulation and perform Sim2Real transfer for real robot deployment. We perform extensive experiments and show significant improvements over baselines in picking up diverse objects in different configurations (heights, locations, orientations) and environments.
Read more5/15/2024
0
Learning Force Control for Legged Manipulation
Tifanny Portela, Gabriel B. Margolis, Yandong Ji, Pulkit Agrawal
Controlling contact forces during interactions is critical for locomotion and manipulation tasks. While sim-to-real reinforcement learning (RL) has succeeded in many contact-rich problems, current RL methods achieve forceful interactions implicitly without explicitly regulating forces. We propose a method for training RL policies for direct force control without requiring access to force sensing. We showcase our method on a whole-body control platform of a quadruped robot with an arm. Such force control enables us to perform gravity compensation and impedance control, unlocking compliant whole-body manipulation. The learned whole-body controller with variable compliance makes it intuitive for humans to teleoperate the robot by only commanding the manipulator, and the robot's body adjusts automatically to achieve the desired position and force. Consequently, a human teleoperator can easily demonstrate a wide variety of loco-manipulation tasks. To the best of our knowledge, we provide the first deployment of learned whole-body force control in legged manipulators, paving the way for more versatile and adaptable legged robots.
Read more5/21/2024