Manydepth2: Motion-Aware Self-Supervised Monocular Depth Estimation in Dynamic Scenes

0
Sign in to get full access
Overview
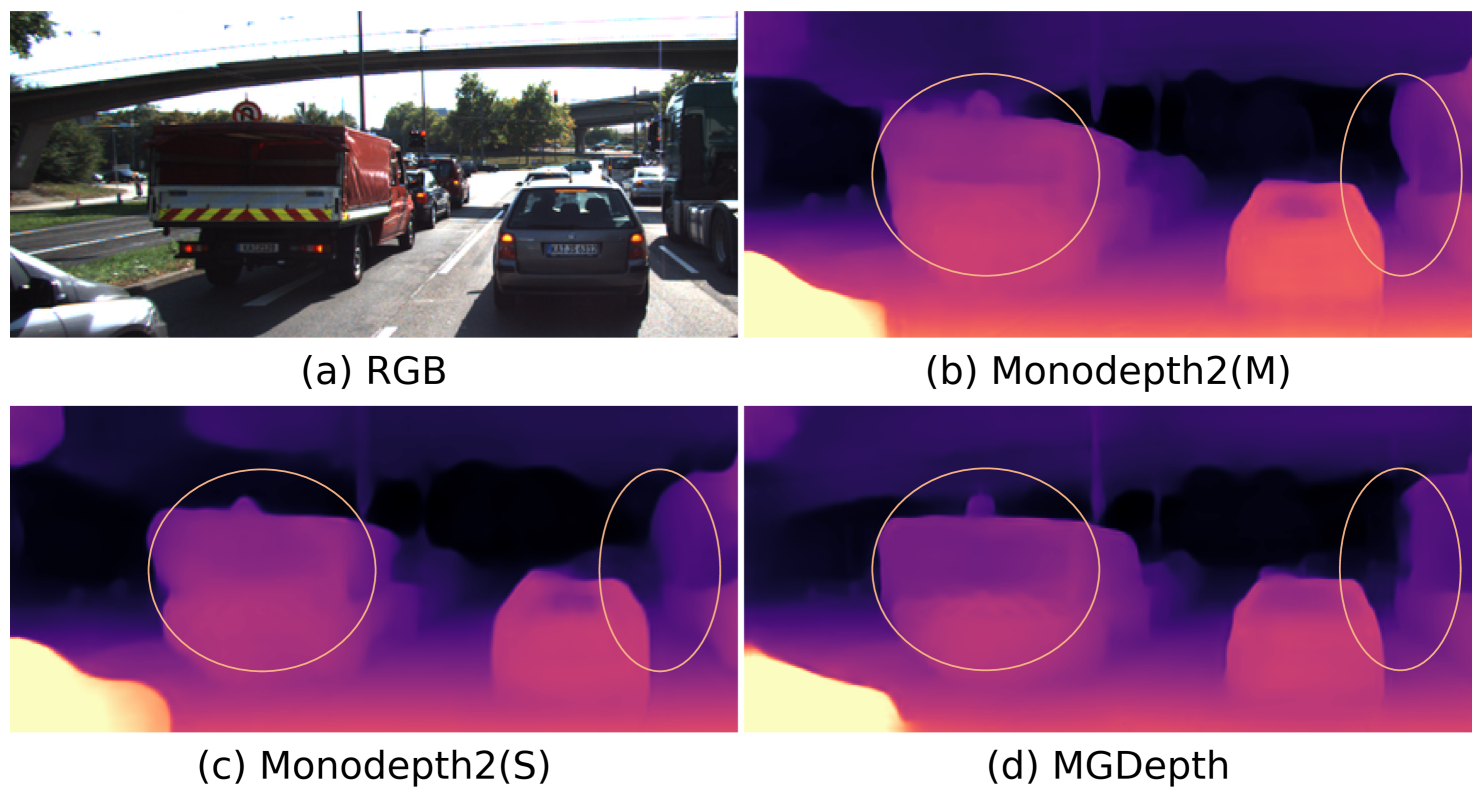
- This paper introduces MGDepth, a method for self-supervised monocular depth estimation in dynamic scenes.
- It uses a motion-guided cost volume to leverage both photometric and motion cues, improving depth prediction in challenging scenarios with moving objects.
- The approach is validated on several datasets, showing improved performance compared to prior self-supervised methods.
Plain English Explanation
The researchers developed a new technique called MGDepth to estimate depth from a single camera in scenes with moving objects. Typical depth estimation models struggle in these dynamic environments, but MGDepth overcomes this by using information about the motion of objects in the scene.
The key idea is to build a cost volume - a 3D grid that stores potential depth values and how well they explain the observed image. MGDepth's cost volume incorporates both the standard photometric cues (how the image would look at different depths) as well as motion cues (how the objects are moving). This allows the model to better resolve depth, especially for moving objects.
The researchers tested MGDepth on several benchmark datasets and found it outperformed previous self-supervised depth estimation methods, particularly in scenes with significant motion. This suggests MGDepth could be a valuable tool for applications like autonomous vehicles or 3D reconstruction that need to work robustly in dynamic environments.
Technical Explanation
The core of the MGDepth approach is the motion-guided cost volume. Typical self-supervised depth estimation relies on a photometric loss - comparing the current image to a synthesized image based on the predicted depth and camera motion. MGDepth augments this with an additional motion-based loss term.
Specifically, MGDepth first computes optical flow between the current and previous frames. It then uses this flow to warp the previous frame and compute a photometric error between the warped previous frame and the current frame. This motion-based photometric error is combined with the standard photometric error to form the final cost volume.
By incorporating both photometric and motion cues, the cost volume can better resolve depth, especially for dynamic regions of the scene. The paper shows MGDepth outperforming prior self-supervised methods like ManyDepth and ProDepth on benchmark datasets with significant motion.
Critical Analysis
The authors note that while MGDepth improves on prior work, there are still some limitations. Dynamic objects with complex motions or large displacements between frames can still be challenging. The authors suggest future work could explore explicit motion segmentation to handle these cases.
Additionally, the approach currently relies on optical flow, which can be noisy or inaccurate in some scenarios. Exploring alternative motion representations or joint estimation of depth and motion may further improve performance.
One broader concern is the inherent difficulty of self-supervised monocular depth estimation, where a single 2D image must be used to infer a 3D scene. This is an ill-posed problem with many potential solutions. While MGDepth demonstrates improvements, depth estimation in general remains a challenging computer vision task.
Conclusion
The MGDepth method introduces an effective way to leverage motion cues for self-supervised monocular depth estimation in dynamic scenes. By building a motion-guided cost volume, it can better resolve depth, especially for moving objects. The results show improved performance over prior self-supervised techniques, suggesting MGDepth could be a valuable tool for applications requiring robust depth perception in challenging real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Manydepth2: Motion-Aware Self-Supervised Monocular Depth Estimation in Dynamic Scenes
Kaichen Zhou, Jia-Wang Bian, Qian Xie, Jian-Qing Zheng, Niki Trigoni, Andrew Markham
Despite advancements in self-supervised monocular depth estimation, challenges persist in dynamic scenarios due to the dependence on assumptions about a static world. In this paper, we present Manydepth2, a Motion-Guided Cost Volume Depth Net, to achieve precise depth estimation for both dynamic objects and static backgrounds, all while maintaining computational efficiency. To tackle the challenges posed by dynamic content, we incorporate optical flow and coarse monocular depth to create a novel static reference frame. This frame is then utilized to build a motion-guided cost volume in collaboration with the target frame. Additionally, to enhance the accuracy and resilience of the network structure, we introduce an attention-based depth net architecture to effectively integrate information from feature maps with varying resolutions. Compared to methods with similar computational costs, Manydepth2 achieves a significant reduction of approximately five percent in root-mean-square error for self-supervised monocular depth estimation on the KITTI-2015 dataset. The code could be found: https://github.com/kaichen-z/Manydepth2
Read more9/27/2024
📉
0
M${^2}$Depth: Self-supervised Two-Frame Multi-camera Metric Depth Estimation
Yingshuang Zou, Yikang Ding, Xi Qiu, Haoqian Wang, Haotian Zhang
This paper presents a novel self-supervised two-frame multi-camera metric depth estimation network, termed M${^2}$Depth, which is designed to predict reliable scale-aware surrounding depth in autonomous driving. Unlike the previous works that use multi-view images from a single time-step or multiple time-step images from a single camera, M${^2}$Depth takes temporally adjacent two-frame images from multiple cameras as inputs and produces high-quality surrounding depth. We first construct cost volumes in spatial and temporal domains individually and propose a spatial-temporal fusion module that integrates the spatial-temporal information to yield a strong volume presentation. We additionally combine the neural prior from SAM features with internal features to reduce the ambiguity between foreground and background and strengthen the depth edges. Extensive experimental results on nuScenes and DDAD benchmarks show M${^2}$Depth achieves state-of-the-art performance. More results can be found in https://heiheishuang.xyz/M2Depth .
Read more5/6/2024
📈
0
Mining Supervision for Dynamic Regions in Self-Supervised Monocular Depth Estimation
Hoang Chuong Nguyen, Tianyu Wang, Jose M. Alvarez, Miaomiao Liu
This paper focuses on self-supervised monocular depth estimation in dynamic scenes trained on monocular videos. Existing methods jointly estimate pixel-wise depth and motion, relying mainly on an image reconstruction loss. Dynamic regions1 remain a critical challenge for these methods due to the inherent ambiguity in depth and motion estimation, resulting in inaccurate depth estimation. This paper proposes a self-supervised training framework exploiting pseudo depth labels for dynamic regions from training data. The key contribution of our framework is to decouple depth estimation for static and dynamic regions of images in the training data. We start with an unsupervised depth estimation approach, which provides reliable depth estimates for static regions and motion cues for dynamic regions and allows us to extract moving object information at the instance level. In the next stage, we use an object network to estimate the depth of those moving objects assuming rigid motions. Then, we propose a new scale alignment module to address the scale ambiguity between estimated depths for static and dynamic regions. We can then use the depth labels generated to train an end-to-end depth estimation network and improve its performance. Extensive experiments on the Cityscapes and KITTI datasets show that our self-training strategy consistently outperforms existing self/unsupervised depth estimation methods.
Read more4/24/2024

0
ProDepth: Boosting Self-Supervised Multi-Frame Monocular Depth with Probabilistic Fusion
Sungmin Woo, Wonjoon Lee, Woo Jin Kim, Dogyoon Lee, Sangyoun Lee
Self-supervised multi-frame monocular depth estimation relies on the geometric consistency between successive frames under the assumption of a static scene. However, the presence of moving objects in dynamic scenes introduces inevitable inconsistencies, causing misaligned multi-frame feature matching and misleading self-supervision during training. In this paper, we propose a novel framework called ProDepth, which effectively addresses the mismatch problem caused by dynamic objects using a probabilistic approach. We initially deduce the uncertainty associated with static scene assumption by adopting an auxiliary decoder. This decoder analyzes inconsistencies embedded in the cost volume, inferring the probability of areas being dynamic. We then directly rectify the erroneous cost volume for dynamic areas through a Probabilistic Cost Volume Modulation (PCVM) module. Specifically, we derive probability distributions of depth candidates from both single-frame and multi-frame cues, modulating the cost volume by adaptively fusing those distributions based on the inferred uncertainty. Additionally, we present a self-supervision loss reweighting strategy that not only masks out incorrect supervision with high uncertainty but also mitigates the risks in remaining possible dynamic areas in accordance with the probability. Our proposed method excels over state-of-the-art approaches in all metrics on both Cityscapes and KITTI datasets, and demonstrates superior generalization ability on the Waymo Open dataset.
Read more7/15/2024